编队接近非合作目标PSO多脉冲制导方法
2015-06-15 17:20高学海哈尔滨工业大学控制科学与工程系5000哈尔滨深圳航天东方红海特卫星有限公司58054广东深圳
哈尔滨工业大学学报 2015年10期
梁 斌,高学海,,潘 乐,仇 越(.哈尔滨工业大学控制科学与工程系,5000哈尔滨;.深圳航天东方红海特卫星有限公司,58054广东深圳)
编队接近非合作目标PSO多脉冲制导方法
梁 斌1,高学海1,2,潘 乐2,仇 越2
(1.哈尔滨工业大学控制科学与工程系,150001哈尔滨;2.深圳航天东方红海特卫星有限公司,518054广东深圳)
为解决地球静止轨道(GEO)非合作目标远距离自主接近中的双视线导航约束以及制导精度问题,提出了一种双星编队接近的粒子群优化(PSO)多脉冲制导方法,该方法将C-W双脉冲制导律转化为带中途修正的多脉冲制导律,然后将时间固定的多脉冲燃料消耗最优问题转化为带双视线夹角约束和制导精度约束的多目标优化问题,接着将带约束的多目标优化问题转化为PSO规划问题并给出规划算法.通过在不同条件下的对比仿真验证结果表明,该方法能够有效的完成对非合作目标远距离的制导.
编队接近;多脉冲;PSO;非合作目标;空间机器人
利用空间机器人对地球静止轨道航天器进行在轨服务是近年来航天高技术领域研究的热点[1-2].要完成对目标航天器在轨服务,空间机器人必须具备自主交会接近的能力.尤其是在远距离阶段,受到相对导航设备作用距离的限制,并且目标航天器多为非合作目标(即空间机器人和目标航天器之间没有信息交换),空间机器人只能采用视觉测量系统进行相对导航.因此,空间机器人对非合作目标航天器的远距离制导与控制是研究的一个重点.
在低地球圆轨道,当两个航天器相对距离远小于轨道半长轴时,两者之间的相对制导律通常采用C-W方程;并且基于C-W方程的时间固定燃料最省优化算法已很成熟[3-4].文献[5-6]给出了基于遗传算法的最优双脉冲制导方法.然而,在GEO轨道,空间机器人对目标航天器的远距离交会接近段一般超过上百千米,传统单视线相对导航的可观测度低,导航结果偏差较大[7],受此影响空间机器人对目标航天器的相对制导精度较差.文献[8-9]给出了一种基于双视线的相对导航方法,该方法通过两个空间机器人形成测量基线对目标航天器进行相对导航,提高了相对导航的可观测度和测量精度.文献[10]给出了基于C-W方程的近距离交会接近的多脉冲优化遗传算法,由于遗传算法各染色体之间相互交换信息,该方法收敛速度较慢.PSO算法从随机解出发,通过迭代寻找最优解,通过适应度来评价解的品质,没有遗传算法的“交叉”和“变异”操作,通过追随当前搜索到的最优值来寻找全局最优,相比遗传算法规则更为简单、实现容易、精度高、收敛快[11-13].针对上述问题,文中首先给出了两个空间机器人编队接近非合作目标的相对动力学模型;其次推导了多脉冲C-W制导的状态转移方程;然后分别给出了两个空间机器人带约束的多脉冲优化问题;接着给出了两个空间机器人的PSO多脉冲优化算法,并通过数学仿真对该方法的可行性和有效性进行校验.
1 相对动力学模型
1.1 双星编队接近模型
双星编队接近非合作目标的测量模型如图1所示,双星编队接近系统由操作空间机器人和监视空间机器人组成.编队接近系统与非合作航天器的轨道共面,操作空间机器人与非合作航天器的轨道高度相同,监视空间机器人的轨道高度略低于非合作航天器.在自主接近的远距离阶段,操作空间机器人、监视空间机器人与非合作目标之间形成三角相对运动关系.LCT为非合作目标在操作空间机器人中的视线方向;LMT为非合作目标在监视空间机器人中的视线方向;θ为两视线方向的夹角;TCM为操作空间机器人在监视空间机器人中相对运动矢量.

图1 编队接近非合作目标模型
1.2 相对动力学方程
在近圆轨道,设有两个航天器分别为目标航天器和追踪航天器,当两个航天器之间的相对距离远小于轨道半长轴时,两个航天器之间的相对动力学方程可以用C-W方程来描述[3]:

其中:x,y,z为追踪航天器在目标航天器坐标系下的相对位置;n为目标航天器的轨道角速率;ax,ay,az为除地球引力加速度外,作用在两航天器的加速度.
设两个航天器之间的相对运动状态为

在没有外力加速度的作用下,相对运动状态转移方程为X(t)=Φ(t)X(0).其中:X(0)为初始状态;Φ(t)为状态转移矩阵;X(t)为t时刻状态.状态转移矩阵中,S表示正弦函数,C表示余弦函数.
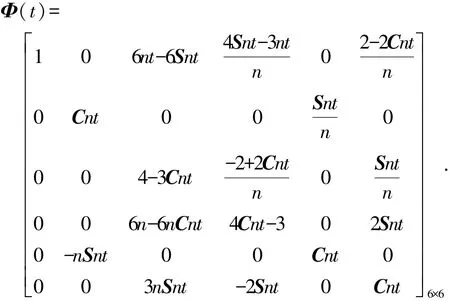
为更好的描述相对运动过程中相对位置和速度的变化,将相对运动转移方程改写为分别与位置、速度相关的方程:

2 多脉冲制导模型
2.1 双脉冲C-W制导
双脉冲C-W制导是在初始相对状态时刻,对追踪航天器施加第一个速度脉冲Δv0,追踪航天器按C-W方程运动,经时间t后,对追踪航天器施加第二个速度脉冲Δvt,达到两个航天器期望的相对位置和速度.在这里假定施加速度脉冲的时间很短,可忽略不计.由两航天器的相对运动状态方程可以得到相对位置的转移方程为rt=t)r0+t)v0.该方程说明,给定相对转移时间t,由于相对初始位置不能发生突变,那么t时刻的相对位置仅与初始时刻的相对速度有关.初始时刻的相对速度可表示为
v0=Φr-v1(t)rt-Φr-v1(t)Φrr(t)r0.也就是给定了t时刻期望的相对位置rt、施加速度脉冲前的相对运动状态[r0,v-0]T(由相对导航得到),则初始时刻施加的第一个速度脉冲为

同样,相对运动速度的状态转移方程为vt=+.若给定了t时刻期望的相对速度v+t,则在t时刻施加的第二个速度脉冲为

通过两个速度脉冲Δv0和Δvt,经过C-W制导,追踪航天器可以达到期望的相对位置和速度.然而,在GEO轨道远距离接近非合作目标过程中,追踪航天器和目标航天器之间的相对距离可以达到100~200 km及以上,C-W制导方程将存在较大的误差,且远距离相对导航的误差也较大,仅采用双脉冲制导的方式,将很难达到期望的制导与控制精度.因此,需采用具有中途修正的多脉冲C-W制导方法.
2.2 多脉冲C-W制导
采用多脉冲制导方式,提高GEO轨道远距离接近过程中的C-W制导精度.假定多脉冲制导的速度脉冲个数为N≥2,速度脉冲的施加时刻为ti(i=0,1,2,…,N-1),根据双脉冲制导的相对运动状态转移方程可得:
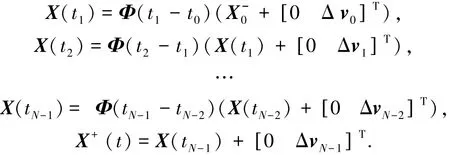
上述方程中,t0=0,t=tN-1,0=[0,0,0]T.将上述每个时间段的相对运动状态转移方程顺序依次带入下一个方程,可以得到多脉冲制导的相对运动转移方程为:
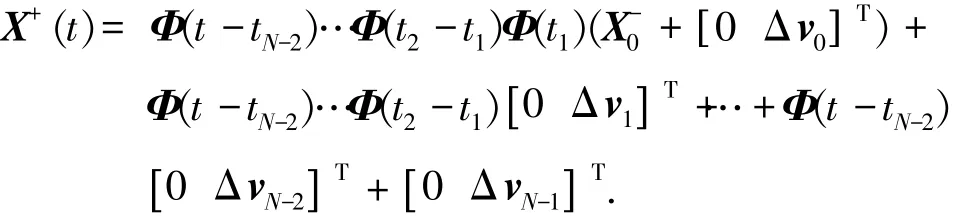
利用状态转移矩阵的性质,多脉冲制导状态转移方程可以改写为

至此,推导了多脉冲制导的状态转移方程,下面将依据该相对运动状态方程推导双星编队接近多脉冲制导的PSO优化方法.
3 编队多脉冲制导PSO优化方法
利用编队接近系统实现对GEO轨道非合作目标的远距离自主交会接近.编队接近系统中,操作空间机器人主要实现对非合作目标的交会接近与服务操作;监视空间机器人主要辅助操作空间机器人实现相对导航以及对非合作目标服务操作的绕飞监视.在远距离接近非合作目标过程中,操作空间机器人主要进行多脉冲制导,以达到期望的相对位置和速度;而监视空间机器人不仅要进行多脉冲制导,并且在制导过程中要使双视线的夹角满足约束要求.因此,为降低优化参数的维数,进行分布优化.操作空间机器人进行带制导精度约束的多脉冲优化,并将优化结果传输给监视空间机器人;监视空间机器人进行带制导精度约束和双视线夹角约束的多脉冲优化.
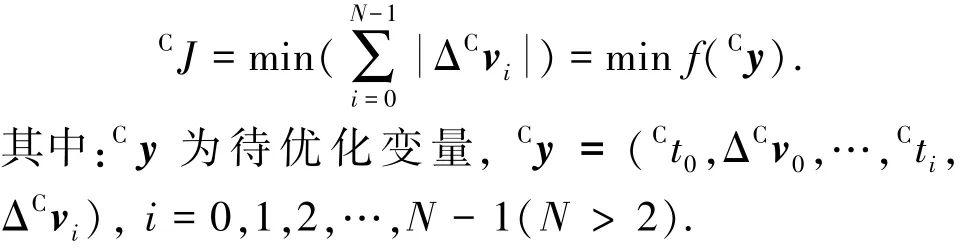
3.1 操作空间机器人多脉冲优化问题
通过相对导航得到操作空间机器人与空间非合作目标的初始相对运动状态[,给定转移时间Ct和期望的最终相对运动状态=[根据多脉冲状态转移方程,操作空间机器人固定时间的多脉冲燃料最省优化问题的目标函数为
由于相对导航误差和控制误差的影响,操作空间机器人不能真正达到期望的最终相对运动状态,因此,增加最终状态位置精度的约束函数:

那么,操作空间机器人的多脉冲制导优化问题转化为带约束的非线性最优问题.为简化优化问题,引入罚函数转化为不带约束的非线性优化问题,得到新的优化目标函数为

其中:CMP(Cy)即为罚函数,CM为罚因子.
3.2 监视空间机器人多脉冲优化问题
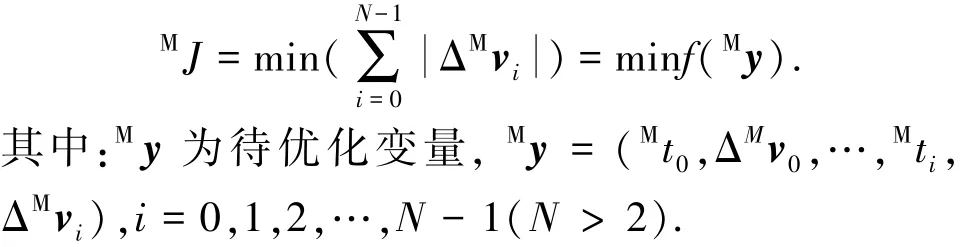
与操作空间机器人相同,监视空间机器人最终状态位置精度的约束函数:

其中:Mrf为实际的相对位置,由相对导航得到;MR为可容许的位置误差.
文献[8-9]中给出双星编队之间的基线影响双视线导航的可观测性,该问题可转化为双视线之间的夹角问题.为保证接近过程中能够实现相对导航,两个空间机器人与空间非合作目标的视线夹角必须大于最小约束条件θ.因此,监视空间机器人增加第二个约束函数:

其中:“·”为矢量点乘;LMT为监视空间机器人到空间非合作目标视线的归一化方向数;LCT为操作空间机器人到空间非合作目标视线的归一化方向数;Cy为操作空间机器人的优化结果,通过星间链路传输给监视空间机器人,与操作空间机器人相同,为简化优化问题,引入罚函数转化为不带约束的非线性优化问题,得到新的优化目标函数为

其中MM和MM为罚因子.12
3.3 粒子群优化算法
与遗传优化算法类似,粒子群优化算法基于群迭代,通过问题空间中的一组粒子寻找最优解.不同于遗传算法的是粒子群优化算法不需要进行交叉和变异操作,强调的是粒子之间的协作关系.因而,粒子群算法较遗传算法更快速收敛且执行简单.
多脉冲优化问题中的待优化变量为脉冲时刻和三个轴方向的速度增量,若实施N次脉冲,则待优化变量个数为4 N个.假定yi是粒子群中的一个粒子,D=4N是一个粒子中变量维数,np是粒子群中粒子的个数,Nmax是粒子群优化算法的最大迭代次数.那么,粒子群优化算法流程如下:
1)根据待优化变量的范围,随机初始化一组粒子群,并给出粒子的随机变化速率,即
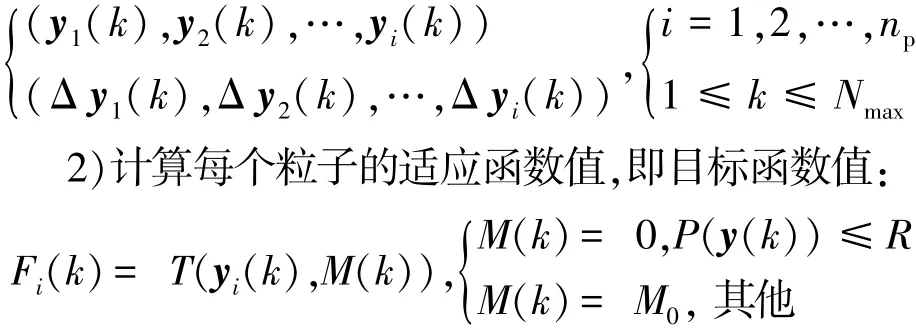
3)计算粒子的局部最优适应度值,以及局部最优适应度的位置,即
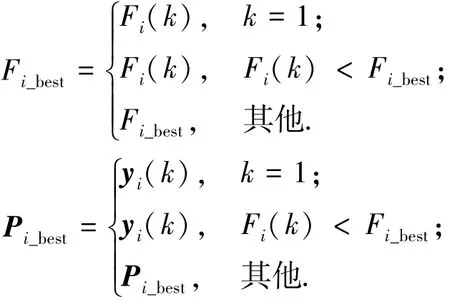
4)计算粒子群的全局最优适应度值,以及全局最优适应度的位置,即

其中:ω为速度变化的惯性权重,权重值越大,全局搜索能力越强,权重值越小,局部搜索能力越强;c1和c2是速度的运动轨迹,数值越小,将远离目标最优值,数值越大,可能产生寻优突变;Rand()是0到1之间的随机数值函数;Ymax是每个待优化变量的最大值.
6)重复2)到5)的步骤,直到达到最大迭代次数或者全局最优适应度的位置Pg_best满足精度要求.
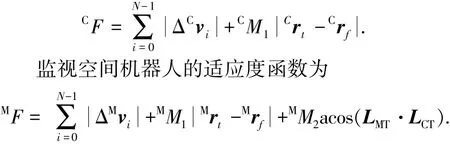
上述6个步骤给出了粒子群优化算法,对于操作空间机器人和监视空间机器人,两个适应度函数的形式有所不同,都由多脉冲状态转移方程确定,操作空间机器人的适应度函数为
4 仿真与分析
通过不同条件下的数学仿真,对本文提出的编队接近非合作目标的PSO多脉冲制导方法的可行性和有效性进行校验.仿真1:单空间机器人双脉冲制导;仿真2:两空间机器人带约束的编队接近PSO多脉冲制导.假定空间机器人与非合作目标在同一个轨道平面内,采用HPOP建立航天器的轨道动力学模型,作为相对运动动力学的输入,以提高模型精度;采用双视线相对导航,导航的相对位置误差为δr=1 km,相对速度误差为δv=0.2 m/s;空间机器人的速度控制误差为δΔv=0.05Δv;交会接近时间为18 000 s;最终接近位置误差为R=2 km;文献[8]在LEO轨道进行仿真,相对距离为70 km,仿真两视线夹角的最大值为5°.本文为GEO轨道远距离接近,相对距离约200 km,根据文献[8]中的结果,初步确定两空间机器人视线夹角约束为θ>15°.
操作空间机器人与非合作目标的初始相对位置与速度、最终相对位置与速度分别为

两空间机器人进行编队接近空间非合目标前,首先完成初始的编队构型,形成测量基线,即监视空间机器人要保证两视线夹角满足导航要求,可转化为监视空间机器人初始位置的优化问题.那么,监视空间机器人与非合作目标的初始相对速度、最终相对位置与速度分别为

两空间机器人以及非合作目标航天器的初始轨道要素如表1所示.
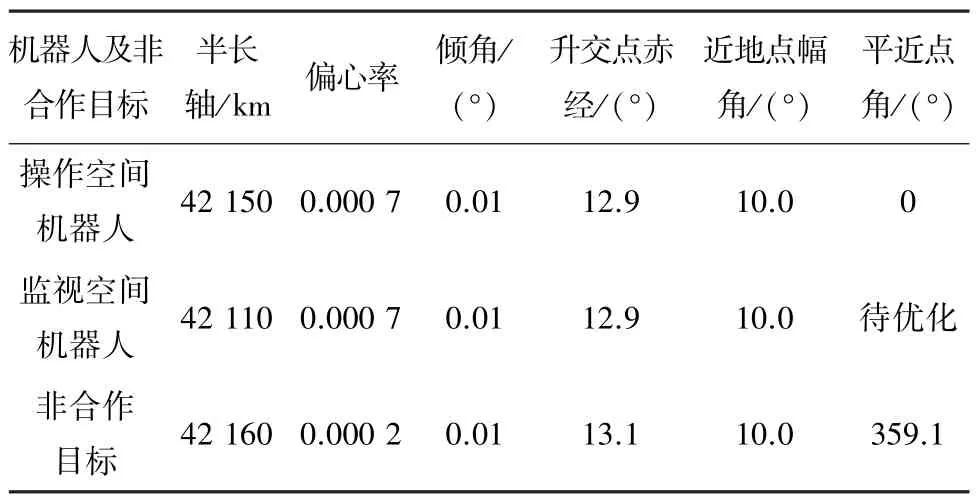
表1 航天器轨道参数
4.1 单空间机器人双脉冲制导
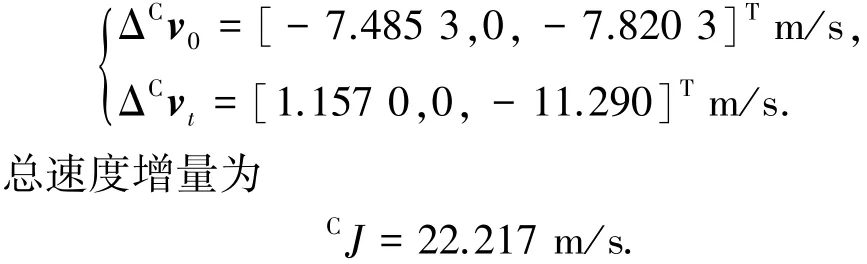
在初始条件下,操作空间机器人采用双脉冲制导的方法接近非合作目标航天器.利用文中给出的双脉冲速度增量计算方法得到初始时刻的速度增量和最终时刻的速度增量分别为
在上述速度增量控制下,操作空间机器人的最终位置误差受相对导航精度和速度控制精度影响.在给出的随机误差变化范围内,采用蒙特卡罗方法对最终位置误差进行统计.经过500次计算,位置误差统计结果如图2所示.采用双脉冲制导X轴方向的最大位置误差超过7 km;Z轴方向的最大位置误差超过10 km.位置误差已经超出了2 km的容许范围.得出结论,在远距离交会接近段采用C-W双脉冲制导方法难以达到期望的相对位置.因此,需要在接近过程中增加速度脉冲,提高制导的精度.下面对本文提出的编队接近的PSO多脉冲制导方法进行仿真验证.
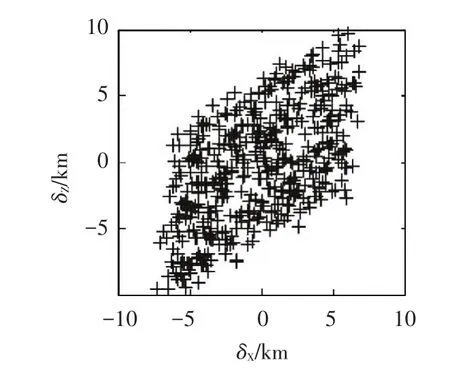
图2 双脉冲制导误差统计
4.2 两空间机器人编队接近PSO多脉冲制导
在两空间机器人远距离交会接近非合作目标的过程中增加一个速度脉冲以提高相对制导的精度.利用文中给出的方法进行PSO三脉冲优化制导,待优化的变量为:y=(t0,Δv0,t1,Δv1,t2,Δv2).由于t0=0,t2=18 000;同时,速度增量Δv1和Δv2可以通过下面公式计算得到:

由于进行轨道面内的交会接近,假定Y轴方向的速度增量为零.那么,操作空间机器人的待优化变量可以简化为

式中:ΔCV0∈[0,20]m/s,Cα∈[0,2π]rad,Ct1∈[0,18 000]s.由于监视空间机器人在接近过程中,需要保持两视线夹角θ>15o.转化为监视空间机器人的初始相对位置优化问题,待优化变量变为

式中:ΔMV0∈[0,20]m/s,Mα∈[0,2π]rad,Mt1∈[0,18 000]s,Mx0∈[150,200]km,Mz0∈[-60,-40]km.给出操作空间机器人与监视空间机器人的PSO优化算法参数设置如表2所示.
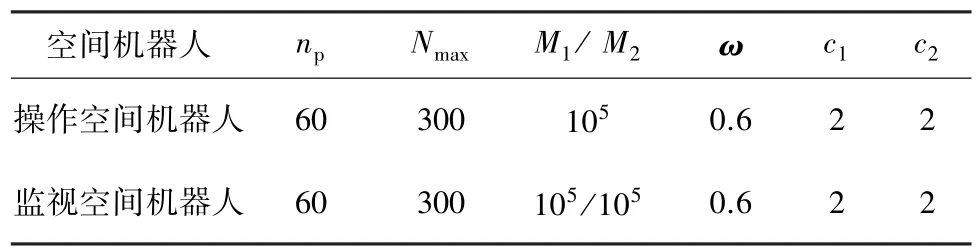
表2 PSO算法参数
根据上述条件,利用本文提出的PSO多脉冲制导算法进行计算,得到操作空间机器人与监视空间机器人的参数优化结果如图3~4和表3所示.
受导航误差和控制误差的影响,单次优化结果是次优的,因此,进行10次优化取平均.操作空间机器人与监视空间机器人的PSO多脉冲制导参数优化结果如表3所示.
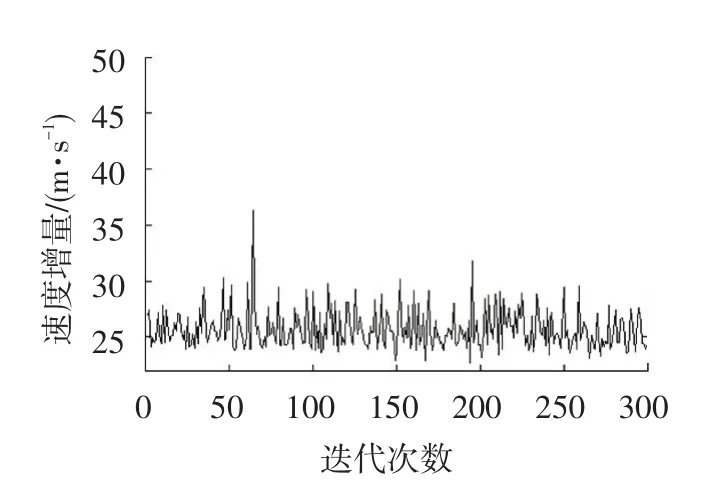
图3 操作空间机器人全局最优适应度值
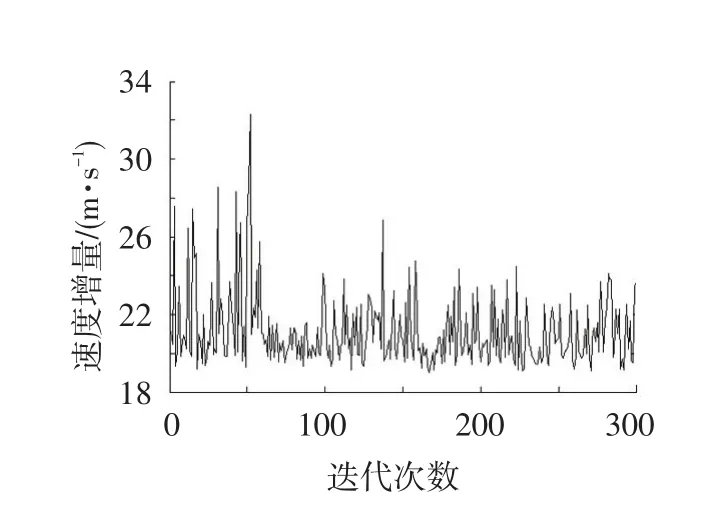
图4 监视空间机器人全局最优适应度值

表3 PSO多脉冲制导优化参数结果
利用上述PSO多脉冲制导优化结果进行交会接近仿真,结果如图5和图6所示.由图可看出夹角最小值为17.2°,满足约束条件要求.由两空间机器人的运动轨迹显示最后都到达位置且均满足误差允许的范围.结果表明本文的编队接近非合作目标的PSO多脉冲制导方法有效.

图5 两视线夹角变化曲线

图6 两空间机器人运动轨迹
5 结 论
1)在高轨非合作目标远距离双视线相对导航的基础上,提出了双星编队接近的多脉冲制导方法,保证双视线导航正常实施,并实现对非合作目标的交会接近.同时,采用多脉冲制导克服了由于C-W方程近似误差引起的制导偏差.仿真结果表明本文的多脉冲制导能够达到位置误差允许的范围之内.
2)设计了基于PSO的多脉冲优化方法,在固定时间燃料最优问题中,引入了最终位置误差约束和操作空间机器人与监视空间机器人的视线夹角约束.采用罚函数,将带约束的最优问题转化为不带约束的非线性优化问题.给出了具体的PSO算法,仿真结果表明编队接近的PSO多脉冲优化算法有效.
3)本文的PSO算法中,罚函数的罚因子为固定值,下一步工作将研究动态罚因子对算法的影响以及改进方法;同时,将进一步展开双视线夹角的最优问题方面的研究.
[1]ELLERY A,KREISEL J,SOMMER B.The case for robotic on⁃orbit servicing of spacecraft:spacecraft reliability is a myth[J].Acta Astronautica,2008,63(5/6):632-648.
[2]梁斌,徐文福,李成,等.地球静止轨道在轨服务技术研究现状与发展趋势[J].宇航学报,2010,31(1):1-13.
[3]FEHSE W.Automated Rendezvous and Docking of Spacecraft[D]. Washington DC:Cambridge Aerospace Series,2003.
[4]GOODMAN J L.History of space shuttle rendezvous and proximity operations[J].Journal of Spacecraft and Rockets,2006,43(5):994-959.
[5]YOUNG H K,DAVID B S.Optimal spacecraft rendezvous using genetic algorithms[J].Journal of Spacecraft and Rockets,2002,39(6):859-865.
[6]王华,唐国金.用遗传算法求解双冲量最优交会问题[J].中国空间科学技术,2003,23(11):26-30.
[7]李九人,李海阳,唐国金,等.基于仅测角的自主交会相对导航策略研究[J].中国科学:技术科学,2011,41(9):1197-1204.
[8]王楷,陈统,徐世杰.基于双视线测量的相对导航方法[J].航空学报,2011,32(6):1084-1091.
[9]CHEN Tong,XU Shi Jie.Double line⁃of⁃sight measuring relative navigation for spacecraft autonomous rendezvous[J]. Acta Astronautica,2010,67(3/4):122-134.
[10]李晨光,肖业伦.多脉冲C-W交会的优化方法[J].宇航学报,2006,27(2):172-176.
[11]李宁.粒子群优化算法的理论分析与应用研究[D].武汉:华中科技大学,2006.
[12]张喆,孟庆春,薛任,等.一种非线性约束优化的微粒群新算法[J].哈尔滨工业大学学报,2006,38(10):1716-1718.
[13]BAI Qing Hai.Analysis of particle swarm optimization algorithm[J].Computer and Information Science,2010,3(1):180-184.
(编辑 张 宏)
Formation proximity of GEO non⁃cooperative target based on PSO multiple impulses guidance law
LIANG Bin1,GAO Xuehai1,2,PAN Le2,QIU Yue2
(1.Department of Control Sciences and Technology,Harbin Institute of Technology,150001 Harbin,China;2.Shenzhen Aerospace Dongfanghong HIT Satellite Ltd.,518054 Shenzhen,Guangdong,China)
To improve the guidance precision of far range autonomous proximity of non⁃cooperative target under double line⁃of⁃sights(LOS)navigation in geostationary orbit(GEO),a formation proximity method is proposed by using particle swarm optimization(PSO)multiple impulses guidance law.More specifically,this method transforms the two impulses C-W guidance law into multiple impulses C-W guidance law with mid⁃correction.Then,the multiple impulses of fixed⁃time fuel optimal problem is presented under the constraints,and a PSO algorithm with two fitness functions is introduced to solve the multi⁃objective optimization problem with constraints of guidance precision and double LOS.Numerical simulations are studied to verify effectiveness and feasibility of the PSO algorithm of multiple impulses guidance under different conditions.
formation proximity;multiple impulses;PSO;non⁃cooperative target;space robot
V423.4
A
0367-6234(2015)10-0007-06
10.11918/j.issn.0367⁃6234.2015.10.002
2014-06-15.
国家自然科学基金(61175098).
梁 斌(1969—),男,教授,博士生导师.
高学海,xuehaigao@163.com.
猜你喜欢
国际太空(2022年7期)2022-08-16
特区文学·诗(2021年6期)2021-12-22
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
金色少年(奇趣科普)(2017年11期)2017-11-28
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
当代贵州(2015年19期)2015-06-13