基于时域去走动的任意构型双站SAR成像算法
2015-07-23 03:07杨瀚涛
电子测试 2015年2期
杨瀚涛
(西安邮电大学教务处,陕西西安,710121)
0 引言
合成孔径雷达(SAR)具有全天候、全天时、远距离、宽观测带、高分辨的特点,可以大大提高雷达的信息获取能力,在军事和民用放面均有重大实用价值。双站合成孔径雷达指的是发射站与接收站处于不同运动平台的合成孔径雷达系统,与单站SAR相比,双站SAR具有隐蔽性好、抗干扰强、可获得地物的非后向散射系数等诸多优点。比单站SAR获取的信息更可靠、更丰富,系统也更安全。因此,近年来,双站SAR已成为雷达研究的一个热点课题。
目前单站SAR成像算法已经比较成熟,包括RD及其改进算法、Chirp-Scaling算法、波数域算法和极坐标算法等。与单站SAR系统相比,双站SAR特别是任意构型双站SAR成像算法的文献较少,双站SAR目标斜距历程为收发斜距和的双根号形式,用驻相点法很难得到其精确的多普勒域解析表达式,需要将单基地成像算法进行适当的改进来适应双基地成像。
本文提出了一种将时域去走动和CS算法相结合的成像算法,分析了任意双站SAR的几何模型,针对双站SAR回波的特殊性,首先在时域校正距离走动,然后在频域校正距离弯曲,经过时域去走动处理后,距离向和方位向的耦合大大降低,最后借助CS算法的思想完成目标成像。仿真结果表明,该算法具有较高的精度,可满足任意双站SAR成像要求。
1 任意双站SAR成像算法
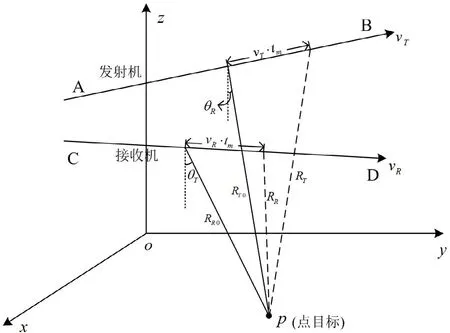
图1 任意双站SAR几何模型
机载双站SAR的几何构型如图1所示,发射站沿AB方向飞行,接收站沿CD方向方向飞行分别为发射站和接收站的速度,P为场景中心点目标分别为零时刻发射站和接收站到P的距离,TRθθ、分别为发射站和接收站的斜视角。
由图1可知,任意时刻mt,系统的瞬时斜距变化方程为

由于(1)式为双根号和的形式,这里考虑对其在合成孔径中心时刻处进行高阶泰勒展开,有

其中

这里0R是中心斜距,1k是线性走动项(LRCM),2k是线性调频率,3k是高阶相位。
假设发射站发射线性调频信号,则接收站接收的回波基带信号可写为


由式(4)距离走动的表达式可知,校正距离走动的表达式为


其中

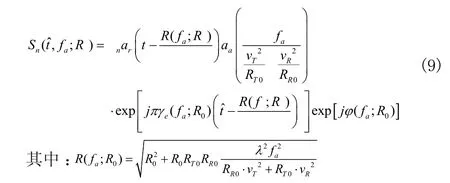
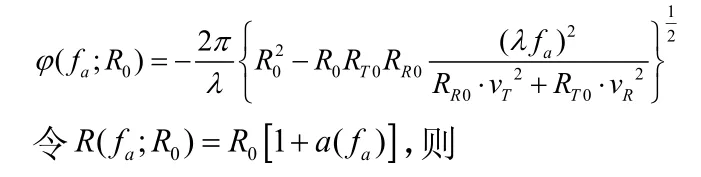
根据驻相点原理,将式(8)变换至距离时域方位频域,可以得到
CS因子为:
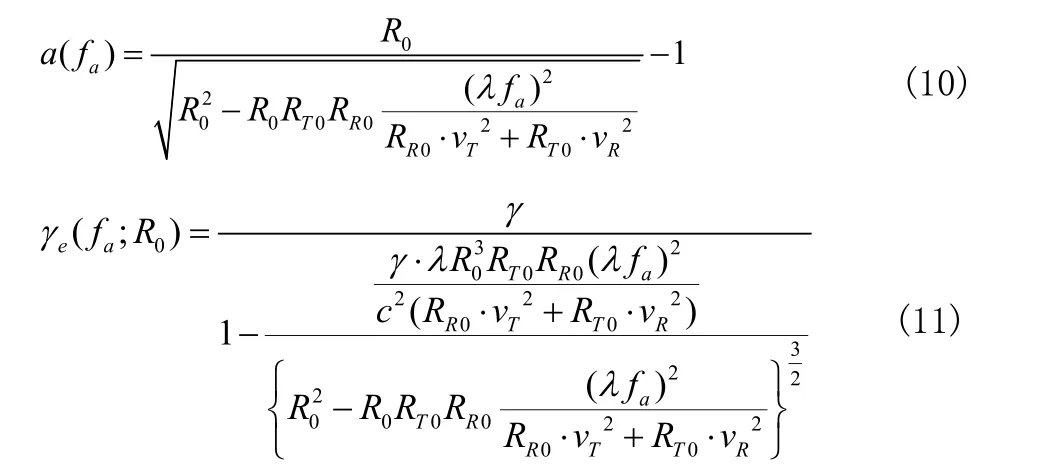
根据上面的表达式,可以得出Chirp Scaling二次相位函数为:

距离压缩,距离徙动校正的相位函数写为

方位压缩处理以及剩余相位项补偿函数为

由以上论述可知,任意双站SAR成像算法的流程图如下:
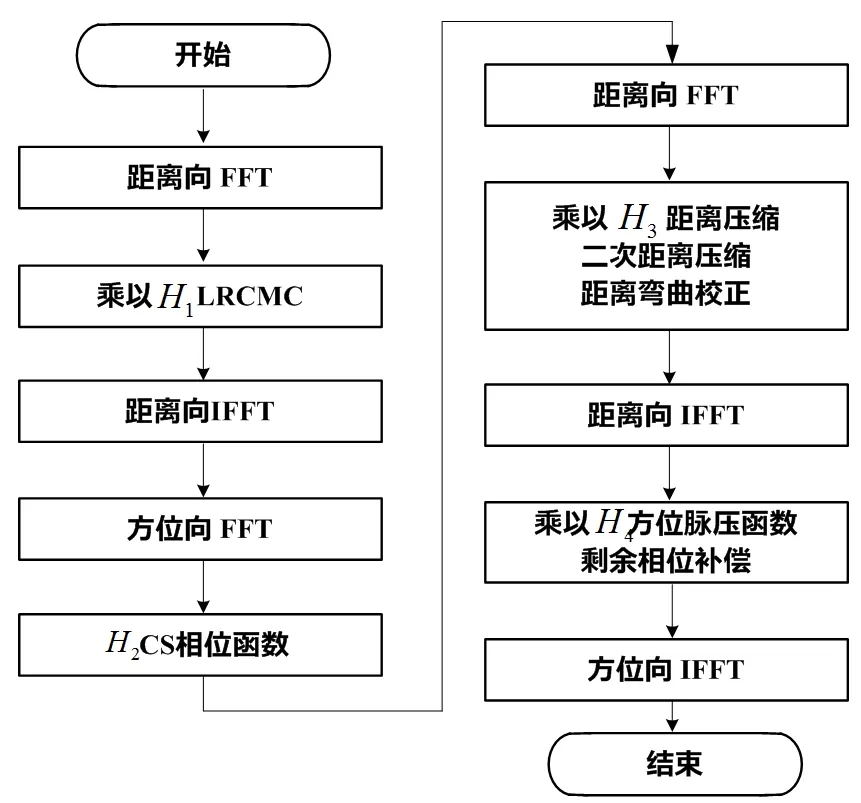
图2 算法流程图
2 仿真分析
为了验证本算法的正确性,下面对九点目标阵进行了仿真,仿真参数如表1所示,其中第5个点坐标为(0m,10000m),位于场景中心位置。目标点在X向间距均取100m,Y向上间距均取20m。
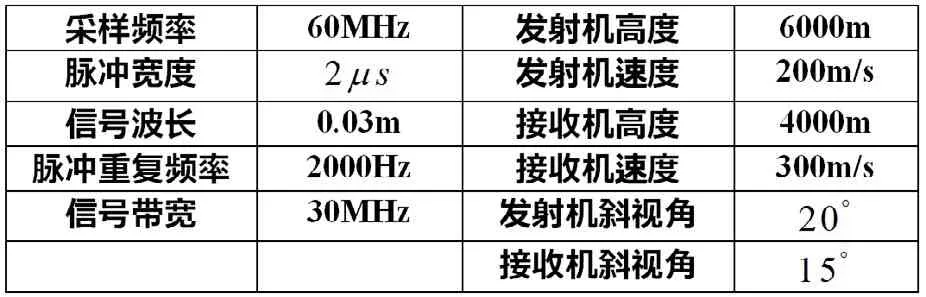
表1 SAR参数
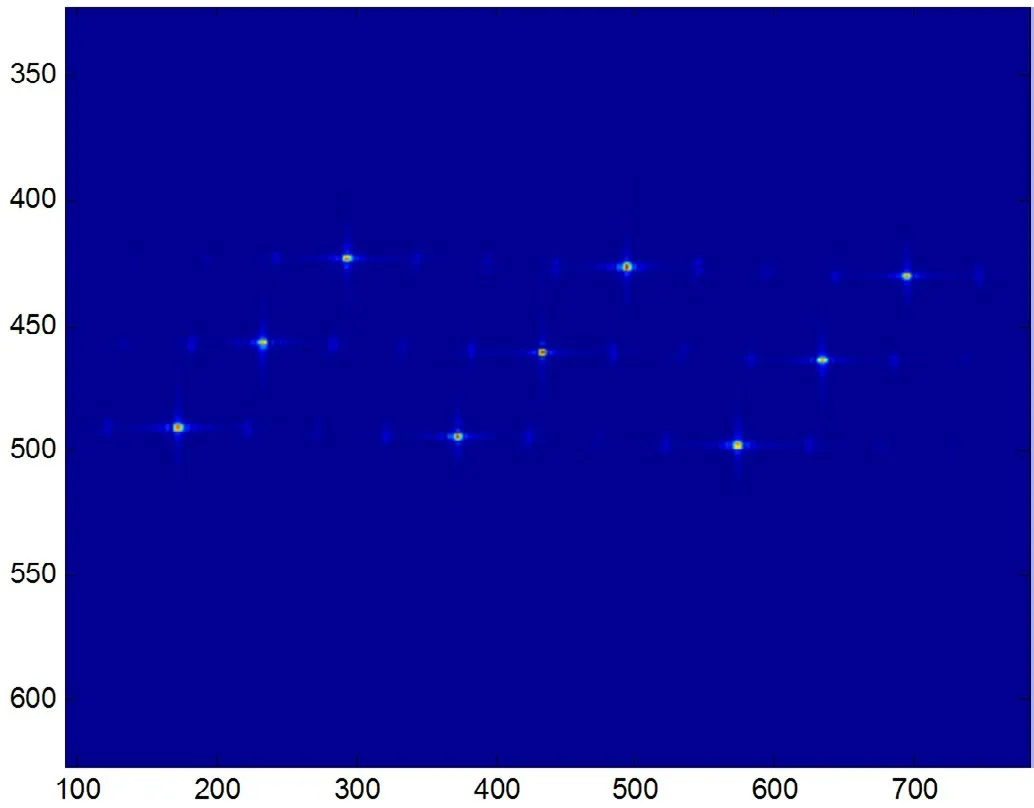
图4 双站SAR单点目标成像仿真结果
图3(a)为场景中心点目标的成像结果,图3(b)、(c)分别为方位向脉冲响应和距离向脉冲响应的归一化幅度图。从图3中可看到点目标图像清晰,距离向和方位向压缩曲线效果较好。
图4为3x3点目标成像结果,可以看出,该算法在任意构型下均能取得较好的成像结果。从而验证了该算法的正确性。
3 结论
本文提出了一种将时域去走动和CS算法相结合的任意构型双站SAR成像算法,分析了其几何模型,在时域校正距离走动,使得距离向和方位向的耦合大大降低,最后借助CS算法的思想完成目标成像。仿真结果表明,该算法具有较高的精度,可满足任意双站SAR成像要求。

图3 双站SAR单点目标成像仿真结果
猜你喜欢
雷达科学与技术(2022年3期)2022-07-01
——2022 F1意大利大奖赛
世界汽车(2022年5期)2022-06-10
电力勘测设计(2022年2期)2022-03-08
雷达与对抗(2021年4期)2021-03-18
中国惯性技术学报(2019年5期)2020-01-07
中文信息(2018年11期)2018-01-09
测绘通报(2017年2期)2017-03-07
科技与创新(2017年1期)2017-02-16
科技传播(2016年10期)2016-07-15
西部广播电视(2016年7期)2016-03-02