
一个鲁棒性冲突解脱轨迹规划模型
2015-08-07 14:10韩云祥汤新民
交通运输系统工程与信息 2015年5期
韩云祥,汤新民
(1.江苏理工学院汽车与交通工程学院,江苏,常州213000;2.南京航空航天大学民航学院,南京210016)
一个鲁棒性冲突解脱轨迹规划模型
韩云祥*1,汤新民2
(1.江苏理工学院汽车与交通工程学院,江苏,常州213000;2.南京航空航天大学民航学院,南京210016)
针对固定航路飞行条件下高密度运行空域多航空器实时冲突解脱轨迹规划问题,为了获取高空风场数值及增强航空器冲突解脱轨迹的鲁棒性,根据航空器的运行状态构建了高空风场线性和非线性滤波模型.采用模型预测控制理论,通过将预测模型的校正过程转化为高空风场数值的滤波过程,在给各航空器设定解脱优先权重及考虑两类解脱变量物理约束条件的前提下,从航空器的动态协同特性出发,构造能够反映控制输入量优劣的指标函数,提出一种能够适应空域环境变化的冲突解脱航迹在线滚动规划方案.算例分析表明,所提出的在线解脱轨迹规划方案可行有效.
航空运输;空中交通管制;间隔;轨迹;卡尔曼滤波;模型预测控制
1 引言
随着空中交通流量的增大,空域面临着越来越严重的拥挤,威胁飞行安全的飞行冲突不断增加,构建灵活可靠的飞行冲突解脱方案对于增加飞行流量及确保航空运输安全具有重大意义.已有飞行冲突解脱方案主要包括离散解脱、连续解脱和混杂解脱三种类型.Basman等所介绍的离散冲突解脱算法将整个过程分为等时间间隔,在每个时隙步通过调整各航空器航向以避免飞行冲突,其缺点是无法处理大量航空器间的冲突[1-3].Gilles等首先将两航空器同步,然后采用几何算法修正冲突航路点,但文中没有考虑实际约束条件[4].与离散冲突解脱方法不同,连续冲突解脱方法直接设计出航空器最优避让航迹.Muñoz等在二维几何最优算法的基础上提出了三维几何优化算法,但文中没有考虑控制量约束条件,使解得的最优值超出了控制范围[5-7].靳学梅等采用内点约束条件,研究了自由飞行条件下航空器控制量受约束时的冲突解脱问题[8,9].John C Clements等利用刻画各航空器运行状态的一组状态方程和最优控制理论,通过调整航空器航向来避免飞行冲突[10,11].此外,C Tomlin等提出的混杂解脱方法将航空器的解脱策略视为飞行状态的切换,通过计算不同飞行阶段上航空器发动机推力及仰角等参数来控制航空器的输出量,以保证航空器运行包络线处于安全区域内[12-14].
总体来讲,相关文献多以“离线形式”为存在冲突的航空器规划解脱航迹,即航空器解脱轨迹规划过程是一次完成的.尽管此类解脱方案在一定程度上简化了航空器冲突解脱轨迹规划过程,但考虑到影响航空器运行的各类外在因素(特别是高空风),它所规划的解脱航迹可能最终不能实施有效解脱,即各航空器解脱航迹的动态适应性较差.因此,有必要进一步引入“在线形式”的航空器解脱航迹规划方案,在考虑影响航空器运行关键要素的前提下,针对解脱轨迹分多次进行规划.此外,已有研究多集中在自由飞行或无约束条件下的飞行冲突避让情形且某些算法应用的前提十分严格(为了便于算法编码,通常假定所有航空器在同一时刻进入和离开扇区),其研究思路有一定的借鉴意义,但并不适合我国航空器在固定航路上运行的实际状况.因此,需要从我国空域运行实际状况出发,在航空器物理解脱变量和运行区域受限时,为航空器规划出能够避免飞行冲突并具有一定鲁棒性的最优冲突解脱航迹.在航空器实际运行中,高空风场对其飞行状态有显著地影响,为了在冲突解脱轨迹规划过程中融入风场因素,依据不同类型的航空器运行状态,借鉴卡尔曼滤波理论获取高空风场数值并进一步采用模型预测控制理论对冲突解脱轨迹规划过程进行建模.
2 风场滤波模型和解脱优化模型构建
相比影响航空器运行的其它因素,高空风场最为重要且其数据的获得也最便捷.根据航空器不同的运行状态,下文分两种情形讨论风场数值的滤波方案.
2.1 航路风场线性滤波模型
在航空器实际运行中,其航向和速度是已知的且在调整航空器航向或速度进行冲突解脱时,航空器的转弯率或加减速率也是已知的,下面首先给出高空风场滤波的状态向量[15].

式中x(k)和y(k)分别表示k时刻航空器位置在横坐标轴和纵坐标轴上的分量;vx(k)和vy(k)分别表示k时刻航空器速度在横坐标轴和纵坐标轴上的分量;wx(k)和wy(k)分别表示k时刻风场数值在横坐标轴和纵坐标轴上的分量.
其观测向量为

设定航空器转弯率和采样步长分别为ωa和Δt,取两个连续的时刻点tk和tk+1,由于转弯率是已知的,因此可构建航空器匀速转弯风场滤波模型为
(1)状态转移方程.

(2)输出测量方程.

式中w(k)和v(k)分别表示系统噪声向量和测量噪声向量,并且

令噪声协方差矩阵Q=0,测量噪声协方差矩阵为
式中σp和σv分别表示航空器位置和速度测量误差.易知,此类风场滤波模型是线性的.
2.2 航路风场非线性滤波模型
通过设置主动临时横撑可以有效减小由于采用塔梁异步施工工艺引起的塔柱根部拉应力,确保塔柱施工质量,从而实现安全、质量、进度兼顾。该工艺在九江长江公路大桥的成功实施,拓展了索塔横梁的施工方法,具有较高的推广价值。
若航空器在转弯过程中线速度存在加减速度值γ()k,此时航空器的运动状态属于变速转弯,同以上讨论类似,由航空器的运动模型可得高空风场非线性滤波模型为[16]
(1)状态转移方程.

其中

非线性状态转移表达式为

其中

在变速转弯高空风场滤波模型中,为了获得高空风场的数值,可以先采用扩展卡尔曼滤波方法对其进行线性化,然后采用常规卡尔曼滤波算法进行计算.
2.3 解脱轨迹规划模型
假设对于每一航空器i都有一个解脱终点pi,f及与其相对应的速度值vi,f,那么该点可以是航空器飞出某区域的“退出点”,也可以是某区域航路上的“中间点”,因此航空器在该解脱终点的状态可用来表示.在时刻t,若航空器的状态为xi,t,那么时段[t,t+T]内共包含(T+1)个航空器状态量和控制量.此外,令变量D代表某特定空域,n(t)表示t时刻D内的航空器数量,各航空器的代码i∈I(t)且I(t)={1,2,…,nt}.由于航空器是在固定航路上运行的,它会经由一系列的中间航路点来到达目的地,因此可以根据各航空器所需飞越的航路点来设定优化指标.假定是在t时刻和航空器代码相对应的下一航路点集,由航空器的运行过程可知,可以将P(t)视为与各航空器相对应的“中间终点集”,以这些“中间终点”为基础,航空器解脱轨迹规划过程可以表述为:在满足安全间隔的前提下,对航空器从当前位置到下一“中间终点”间的运行航迹进行协同规划[17].基于模型预测控制思想,构建如图1所示的多航空器冲突解脱航迹规划方案,它主要包括预测模型和优化模型两部分,前者根据未来的控制序列预测航空器状态,后者根据优化指标求解最优控制序列.
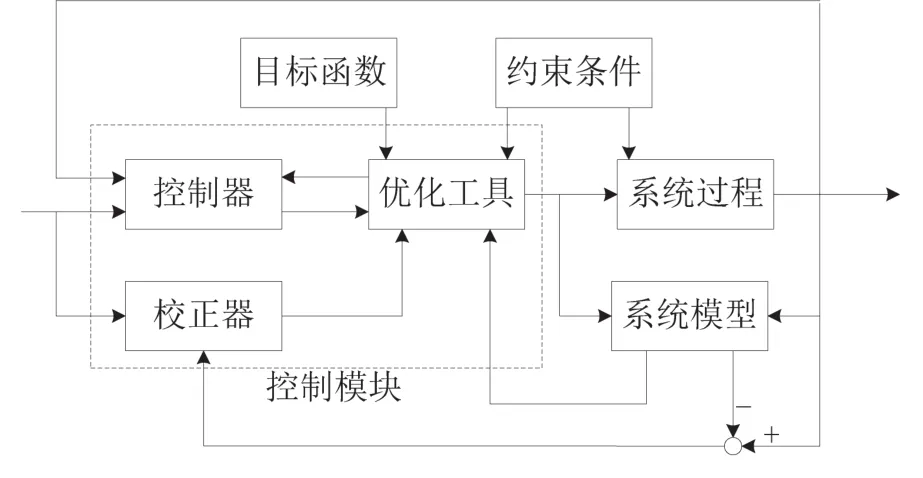
图1 模型预测控制解脱航迹规划方案Fig.1 Conflict resolution trajectory planning based on model predictive control theory

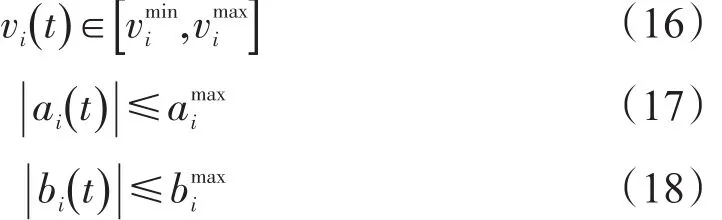
式中xi(t)和yi(t)分别表示t时刻航空器i的横坐标和纵坐标;vi(t)和χi(t)分别表示t时刻航空器i的速度和航向并且χi(t)∈(-π,π];ai(t)和bi(t)分别表示t时刻航空器i的加速度和角速度.
由于机型性能限制,航空器的速度vi(t)、加速度ai(t)和角速度bi(t)需要满足
用Pi(t)表示t时刻航空器的位置向量;用Ui(t)表示t时刻航空器的控制向量,即


式中dik表示tk时刻航空器所在位置和下一航路点间的距离;
那么tk时刻航空器i的优先级指数可设定为
由优先级指数的含义可知,航空器距离其终点越近,其优先级越高.此外,在时刻tk,建立航空器解脱轨迹规划的优化指标为

式中i∈I(t)表示航空器代码;Pi(tk+sτ)表示航空器在时刻(tk+sτ)的位置向量;表示航空器i的解脱终止点表示待优化的航空器最优控制序列;Qik为正定对角矩阵,其对角元素为航空器i在tk时刻的优先级指数λik,并且

3 算例分析
为验证多航空器冲突解脱轨迹规划模型的有效性,给出多航空器冲突解脱实例.如图2所示,L1和L2表示两个交叉的航段,两航段距离分别为240 km和250 km,宽度均为20 km,A、B、C和D分别表示初始时刻各航段入口处的四架航空器,a、b、c和d分别表示以上4架航空器的解脱终止点,在航段入口处时四航空器的初始速度分别为:v1=840 km/h、v2=810 km/h、v3=780 km/h及v4=750 km/h.此外,在各航空器分别以其所在的航路平面为x-y二维平面的前提下,基于四个航段入口点和航段中心线建立四个坐标系xA-yA、xB-yB、xC-yC和xD-yD.根据各航空器的初始位置和终止点,结合前文所述的优化指标,取最小安全间隔为10 km,σp=100 m,σv=0.2 kts,预测时域和控制时域分别为120 s和12 s,设定航空器运行速度取值范围为[700 km/h,950 km/h],不失一般性,设定航空器转弯率取值集合为,航空器加速度取值集合为

图2 冲突解脱轨迹规划航路结构参数和四航空器坐标系构建Fig.2 Air-route parameters of conflict resolution trajectory planning and coordinate system formulation of four aircrafts
根据所构建的坐标系和最优控制序列求解算法,得到A、B、C和D四架航空器的航向和速度“在线”和“离线”调整过程如表1所示(限于篇幅,仅给出部分数据).所谓航空器的航向和速度“在线”调整,即航空器的解脱轨迹不是一次规划完成的,而是在融入高空风场滤波数值的前提下,按照前文所述的模型预测控制策略入对各个航空器的航迹实施滚动规划直至各航空器到达其解脱终止点.所谓航空器的航向和速度“离线”调整,即航空器的解脱轨迹是一次规划完成的,并且在规划过程中不考虑高空风场变量数值直至各航空器到达其解脱终止点.针对航空器的航向调整过程,“-1”表示航空器左转,“1”表示航空器右转,“0”表示航空器航向不变.针对航空器的速度调整过程,“+”表示航空器加速,“-”表示航空器减速,“&”表示航空器速度不变.若单元格内仅含有一个元素如“1”,那么针对某航空器来讲,它表示某时刻航空器的“在线”和“离线”航向调整过程都是“右转”,若单元格内含有二个元素如“-- 11// 11”,那么针对某航空器来讲,它表示某时刻航空器的“在线”航向调整过程是“左转”,而“离线”航向调整过程是“右转”.
基于前文所设定的优化指标函数和表1中各航空器的状态调整过程,得到四架航空器的“在线”解脱航迹如图3所示,由图3可知,各航空器的解脱航迹均满足航路空间位置约束和空管规则规定的最小安全间隔约束,而根据表1所获取的如图4所示的“离线”解脱航迹不满足空管规则规定的最小安全间隔约束,这是由于和“离线”方案相比,“在线”方案在解脱轨迹规划过程是分步实施的,它只考虑从当前时刻起未来某段时间内的航空器状态优化调整并且它融入了外界干扰因素(高空风)对航空器运行状态的影响,它能及时跟踪并融入外界风场变量数值的变化状况,依据风场数值持续更新当前时刻待实施的最优控制策略,由此也体现了航空器“在线”轨迹规划方案的鲁棒性,尽管在某一时刻它不能保证所获取的解脱轨迹是全局最优的.

表1 四架航空器的状态调整过程(部分)Table 1State adjustment process of four aircrafts(partial data)

图3 四航空器在线冲突解脱航迹Fig.3 Online conflict resolution trajectory of four aircrafts

图4 四航空器离线冲突解脱航迹Fig.4 Offline conflict resolution trajectory of four aircrafts
4 研究结论
依据航空器冲突解脱轨迹规划的特点,采用模型预测控制理论提出了一种能够适应环境变化的冲突解脱航迹在线规划方法,将预测模型的校正过程转化为高空风场数值的滤波过程.根据航空器所实施的冲突解脱策略,建立了风场线性滤波模型和非线性滤波模型.在考虑调整航空器速度和航空器航向2种解脱策略的前提下,构造了能够反映控制输入量优劣的指标函数并获取了航空器鲁棒解脱轨迹,下一步将进一步研究性能指标函数对航空器解脱轨迹的影响并将航空器运行区域由二维扩展到三维.
[1]Al-Basman M,Hu J H.Probability of conflict analysis of 3D aircraft flight based on two-level Markov chain approximation approach[C].International Conference on Networking,Sensing and Control.Illinois,USA:IEEE, 2010.
[2]Prandini M,Hu J H,Lygeros J,et al.A probabilistic approachtoaircraftconflictdetection[J].IEEE TransactionsonIntelligentTransportationSystems, 2000,1(4):199-220.
[3]Hu J H,Prandini M,Sastry S.Aircraft conflict prediction in the presence of a spatially correlated wind field[J]. IEEETransactionsonIntelligentTransportation Systems,2005,6(3):326-340.
[4]Gilles D,César M,Alfons G.Tactical conflict detection and resolution in a 3-D airspace[R].NASA Langley Research Center,2001.
[5]Friedman M F.Decision analysis and optimality in air traffic control conflict resolution:II.Optimal heading (vectoring)control in a linear planar configuration[J]. Transportation Research Part B:Methodological,1991, 25(1):39-53.
[6]Friedman M F.Decision analysis and optimality in air traffic control conflict resolution I.optimal timing of speedcontrolinalinearplanarconfiguration[J]. Transportation Research Part B:Methodological,1988, 22(3):207-216.
[7]Pallottino L,Bicchi A.On the optimal conflict resolution for air traffic control[C].Proceedings of IEEE Intelligent Transportation Systems Conference,Dearborn,USA: IEEE,2000:167-172.
[8]靳学梅,韩松臣,孙樊荣.自由飞行中冲突解脱的线性规划法[J].交通运输工程学报,2003,03(02):75-79. [JIN X M,HAN S C,SUN F R.Conflict resolution in free flight with linear programming[J].Journal of Traffic and Transportation Engineering,2003,03(02):75-79.]
[9]朱代武.低空空域飞行冲突避让算法[J].交通运输工程学报,2005,05(03):73-76.[ZHU D W.Calculational methods of avoiding flight conflict in low altitude airspace[J].JournalofTrafficandTransportation Engineering,2005,05(03):73-76.]
[10]Clements J C.The optimal control of collision avoidance trajectories in air traffic management[J].Transportation Research Part B:Methodological,1999,33(4):265-280. [11]He X J,Liao M Z W,Chen W F.A conflict detectionand resolution scheme using dynamic flight model[C]. Proceedings of the Eighth International Conference on Machine Learning and Cybernetics.Baoding,China: IEEE,2009.
[12]Tomlin C,Mitchell I M,Ghosh R.Safety verification of conflict resolution manoeuvres[J].IEEE Transactions on Intelligent Transportation Systems,2001,2(2):110-120.
[13]Tomlin C,Lygeros J,Sastry S.A game theoretic approach to controller design for hybrid systems[J]. Proceedings of the IEEE.2000,88(7):949-970.
[14]Ghosh R,Tomlin C.Maneuver design for multiple aircraftconflictresolution[C].Proceedingsofthe American Control Conference.Illinois,USA:IEEE,2000: 672-676.
[15]DelahayeD,PuechmorelS.Aircraftlocalwind estimation from radar tracker data[C].10th International ConferenceonControl,Automation,Roboticsand Vision.Hanoi,Vietnam:IEEE,2008.
[16]DelahayeD,PuechmorelS,VacherP.Windfield estimation by radar track Kalman filtering and vector spline extrapolation[C].The22nd Digital Avionics Systems Conference.Indianapolis,USA:IEEE,2003.
[17]Bousson K.Model predictive control approach to global air collision avoidance[J].Aircraft Engineering and Aerospace Technology,2008,80(6):605-612.
The Planning of Robust Conflict Resolution Trajectory
HAN Yun-xiang1,TANG Xin-min2
(1.School ofAutomobile and Traffic Eng.,Jiangsu Univ.of Technol.,Changzhou 213000,Jiangsu,China; 2.CivilAviation College,Nanjing Univ.ofAeronautics&Astronautics,Nanjing 210016,China)
In order to obtain high altitude wind field value and enhance the robustness of the aircraft conflict resolution,the wind field linear and nonlinear filtering model are formulated according to the running state of the high altitude aircraft focusing on the real-time conflict resolution trajectory planning problems under the condition of fixed routes and high density airspace.Starting from the dynamic collaborative features of aircrafts,the aircraft online rolling conflict resolution trajectory planning scheme is proposed.The trajectory planning model is formulated through setting priority weights to each aircraft based on model predictive control theory and linear&nonlinear wind filter model.The constraint conditions include airway space constraint and aircraft performance constraint.The optimization cost function is put forward to reflect the control inputs and the presented optimization model can adapt to the state change of airspace.Besides,the wind filter model is taken as calibration process of aircraft motion forecast model.The experimental results show the effectiveness of the proposed aircraft trajectory online rolling planning model.
air transportation;air traffic control;separation;trajectories;Kalman filter;model predictive control
1009-6744(2015)05-0142-08
V355
A
2015-06-18
2015-08-09录用日期:2015-08-17
国家自然科学基金(61174180).
韩云祥(1985-),男,河南驻马店人,讲师,博士. *
hannuaa@126.com
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
能源(2017年8期)2017-10-18
西南石油大学学报(社会科学版)(2016年1期)2016-12-01
哈尔滨商业大学学报(自然科学版)(2016年4期)2016-09-02
太空探索(2016年3期)2016-07-12
太空探索(2016年8期)2016-07-10
工业设计(2016年6期)2016-04-17
通信电源技术(2016年1期)2016-04-16
海军航空大学学报(2015年3期)2015-11-11
中学历史教学(2015年11期)2015-11-11
