自动导引小车(AGV)运动学模型研究和动力学仿真
2015-08-12 08:16陈卓
河南科技 2015年1期
陈 卓
(中国人民解放军海军七〇一工厂,北京 100015)
自动导引小车(Automated Guided Vehicle 简 称AGV),是指装备有电磁或光学自动导引装置,能够沿规定的导引路径行驶,具有编程与停车选择装置、安全保护以及各种移载功能的运动小车[1]。AGV 是一种具有复杂装置和系统的自动化机器人, 是现代制造和物流等企业中的重要设备,主要用来储运各类物料,为系统柔性化、集成化、高效运行提供了重要而有效的保证[2]。 本文在AGV车体动力学的基础上,综合考虑了电机的输出转矩、车体质量分布和各种阻力对车速的影响, 最终可得到驱动电机输入转矩与导向车轮转速的非线性耦合关系, 这对指导车体的机械结构设计和合理路径规划等相关研究有重要意义。
1 AGV 车体运动模型
1.1 车体运动建模
本文研究的AGV 采用三轮结构形式,即两后轮分别由独立电机差速驱动,前轮为万向轮。
AGV 车体部分的受力如图1 所示。 A 为前轮与车架的连接点,L、R 为左右后轮与车架的连接点,C 为车架的质心,通过质心C 建立瞬时惯性坐标系O—XYZ。

图1 车体动力学模型
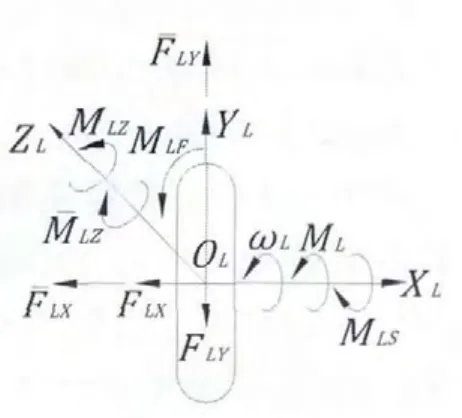
图2 左后轮受力示意图
可根据达郎贝尔原理列[3]出车体动力学平衡方程:
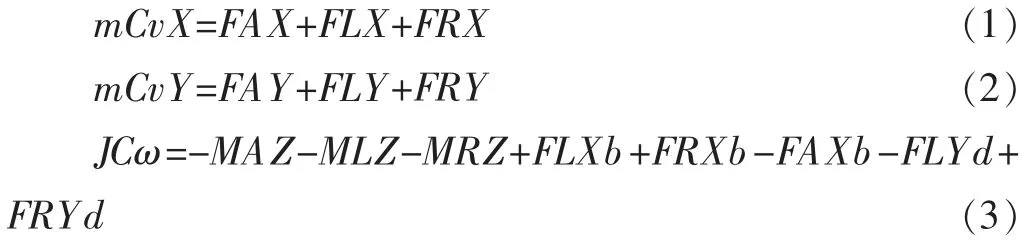
式中,mC—车体质量;vX,vY—车体C 点沿X,Y 方向加速度;FAX,FAY—车体A 点沿X,Y 方向受力;FLX,FLY—车体L 点沿X,Y 方向受力;FRX,FRY—车体R 点沿X,Y 方向受力;JC—车体质心C 绕Z 轴转动惯量;ω—车体质心C 绕Z 轴角加速度;MAZ,MLZ,MRZ—车体A,L,R 点处所受转矩。
车体A,L,R 点运动方程如下:

式 中,vAX,vAY—车 体A 点 沿X,Y 方 向 速 度;vAX,vAY—车体A 点沿X,Y 方向加速度;vLX,vLY—车体L 点沿X,Y 方向速度;vRX,vRY—车体R 点沿X,Y 方向速度;vLX,vLY—车体L 点沿X,Y 方向加速度;vRX,vRY—车体R 点沿X,Y 方向加速度。
1.2 车体左右后轮运动建模
车体左后轮的受力如图2 所示。 图中瞬时惯性坐标系OL—XLYLZL 与图1 中O—XYZ 方向一致。
左后轮运动方程如下:

式中,mL—左后轮质量;RL—左后轮半径;FLX—地面对左后轮侧滑摩擦力;FLY—地面对左后轮滚动摩擦力;MLZ—地面对左后轮扭转摩擦力矩;ωL,ωLZ—左后轮绕XL,ZL 轴角加速度;JLX,JLZ—左后轮绕XL,ZL 轴的转动惯量;ML—左后轮驱动电机传递给左后轮的转矩;MLS,MLF—左后轮受到轴承的摩擦阻力矩和地面对左后轮的滚动阻力矩。
同理右后轮运动方程如下:
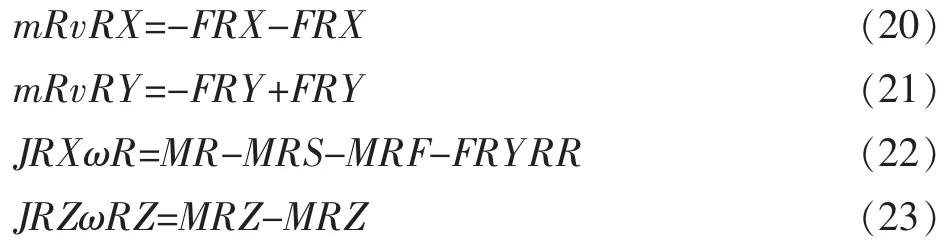
式中,mR—右后轮质量;RR—右后轮半径;FRX—地面对右后轮侧滑摩擦力;FRY—地面对右后轮滚动摩擦力;MRZ—地面对右后轮扭转摩擦力矩;ωR,ωRZ—右后轮绕XL,ZL 轴角加速度;JRX,JRZ—右后轮绕XL,ZL 轴的转动惯量;MR—右后轮驱动电机传递给右后轮的转矩;MRS,MRF—右后轮受到轴承的摩擦阻力矩和地面对右后轮的滚动阻力矩。
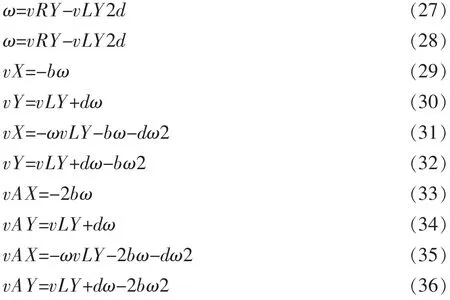
在实际工业应用中,AGV 侧向滑动很小, 即可假设:vLX=vRX=0(24)。 这样车体将以位于左右轮轴线上的某一点O'为瞬时速度中心以角速度ω 转动,如图3 所示。
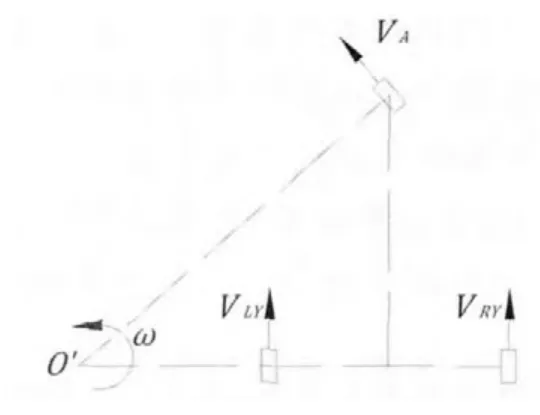
图3 车体及车轮转动示意图
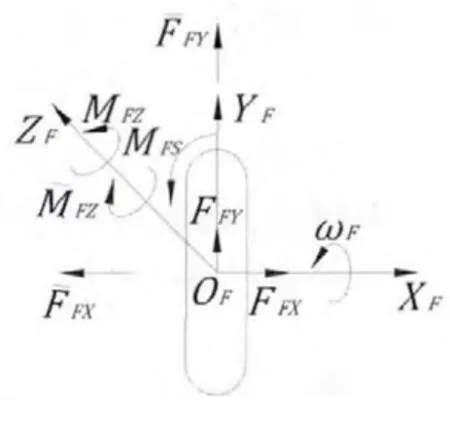
图4 前轮受力示意图

由上述式可得:
1.3 车体前轮运动建模
车体前轮的受力如图4 所示。 图中瞬时惯性坐标系OF—XFYFZF 与图1 中O—XYZ 方向一致。左前轮运动方程如下:

式中,FFX,FFY—前轮连接点F 沿XF,YF 方向受力;mF—左前轮质量;RF—左前轮半径;MFZ―前轮连接点F处沿YF 轴所受转矩;FFX—地面对前轮侧滑摩擦力;FFY—地面对前轮滚动摩擦力;MFZ,MFS—地面对前轮扭转摩擦力矩和滚动阻力矩;ωF,ωFZ—左前轮绕XF,ZF 轴角加速度;JFX,JFZ—左前轮绕XF,ZF 轴的转动惯量。
为求车体整体动力学模型, 可根据实际情况作如下简化:
1.3.1 车体几何尺寸左右对称, 即:RL=RR=R;mL=mR=m。
1.3.2 前轮同车体其他部分相比质量和转动惯量可忽略,即:mF=0;JFX=JFZ=0。
1.3.3 车体运动时车轮不打滑,只作纯滚动,即:

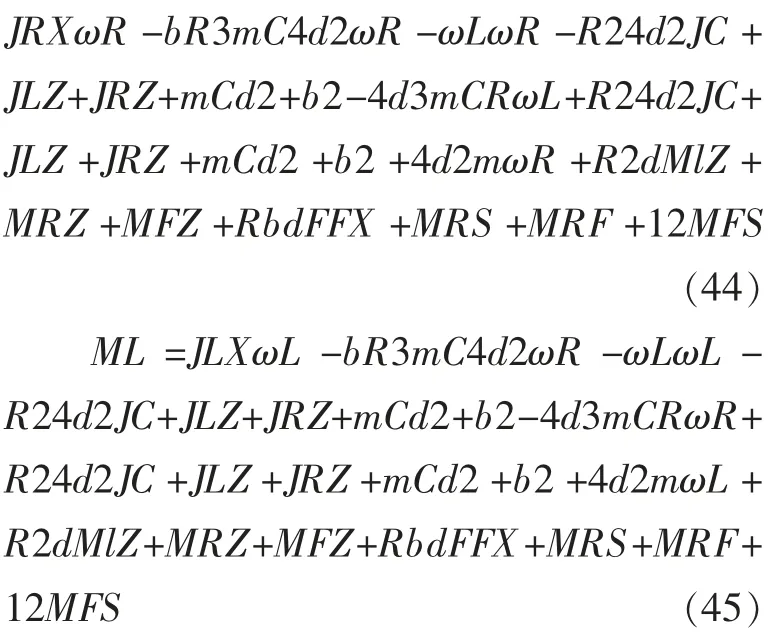
通过上述各式可得MR 和ML:MR=
1.4 车体参数设计
根据AGV 小车结构尺寸和性能要求,设计并计算参数:左、右后轮到质心间距d=0.5m;前、后轮到质心间距b=0.6m;车轮半径R=0.1m;车体质量mC=30kg;地面对前轮侧滑摩擦力[4]FFX=fFN=13fmCg=13×0.8×30×10=80N;右后轮受到轴承的摩擦阻力矩[5]MRS=fFN=13fmCg=13×0.002×30×10=0.2Nm; 地面对右后轮的滚动阻力矩MRF=Nk=13mCgk=13×30×10×0.01=1Nm; 地面对前轮滚动阻力矩MRF=Nk=13mCgk=13×30×10×0.01=1Nm; 地面对左后轮、右后轮和前轮扭转摩擦力矩,MlZ=MRZ=MFZfFN=13fmCg=13×0.002×30×10=0.2Nm。
2 车体动力学方程仿真分析
为了研究后轮驱动电机传递给后轮的转矩与左右后轮转速之间的关系, 假设小车平稳运行时左右后轮角加速度可忽略,即:ωR=ωL=0。
由式(44),式(45)和车体参数可得方程:

利用Matlab 软件编程对式(46),(47)进行仿真分析[6],其中设定ωR 取值范围为0-10rad/s,ωL 取值范围为0-10rad/s,结果如图5、图6 所示。
由图5 可得出MR 与ωR 和ωL 之间的关系。 当ωL偏小,ωR 偏大时,MR 的变化起伏较大。 当ωL 偏大,ωR偏小时,MR 的变化趋于平缓。
由图6 可得出ML 与ωR 和ωL 之间的关系。 当ωL偏大,ωR 偏小时,ML 的变化起伏较大。 当ωL 偏小,ωR偏大时,ML 的变化趋于平缓。
由图5 和图6 可以看出MR 与ML 和ωR 与ωL 之间的非线性耦合关系, 并可以通过Matlab 计算得到ωR 与ωL 在0—10rad/s 转速下所对应MR 与ML 值,从而通过控制左右后轮受到的驱动电机输出的转矩得到想要的行走路径。
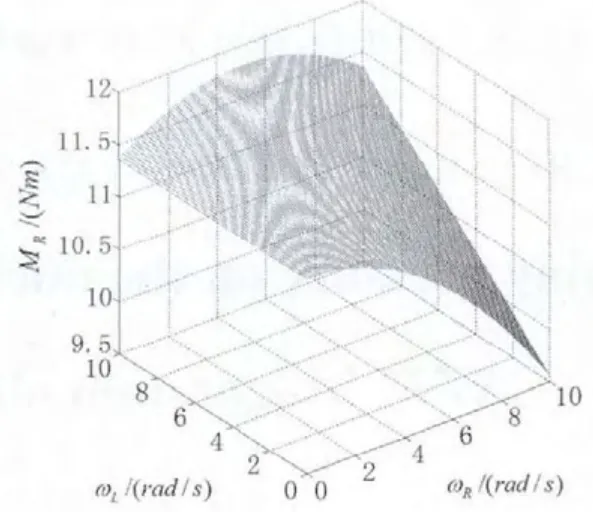
图5 ωR,ωL 取不同值时MR计算结果示意图

图6 ωR,ωL 取不同值时ML计算结果示意图
3 结论
AGV 的运载车体部分是整个系统的承载基础, 路径控制是实现车体运行的重要途径。 本文对两后轮独立驱动差速转向、前轮为万向轮的三轮AGV 小车进行了动力学分析,考虑到车体质量、摩擦阻力的影响,并建立了动力学方程, 从而给出左右驱动轮的驱动转矩和左右轮转动速度之间的非线性耦合关系。 并由此进行Matlab 建模仿真分析,从而验证了动力学方程的合理性和有效性,对AGV 小车的驱动电机选择和控制起步、直线行驶、转弯行驶和停车等情况的参数设计有一定的理论指导意义。
[1]张正义.AGV 技术发展综述[J].物流技术与应用,2005(7):6-7.
[2]Sudha Arora,A K Raina,A K Mittal.Collision Avoidance among AGVS at Junctions [A]. Proceedings of the IEEE intelligent Vehicles Symposim[C].2000(1):31-33.
[3]王铎.理论力学(Ⅰ)[M].6 版.北京:高等教育出版社2002:323-325.
[4]Bowden F P,Tabor D.The friction and lubrication of solids[M].Oxford:Clarendon Press,1954:450.
[5]王文斌.机械设计手册.第1 卷[M].3 版.北京:机械工业出版社,2004:1-24.
[6]薛定宇,陈阳泉.基于MATLAB/Simulink 的系统仿真技术与应用[M].北京:清华大学出版社,2002.
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
小学生学习指导·爆笑校园(2019年6期)2019-09-10
电力系统及其自动化学报(2016年5期)2016-12-01
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11
焊接(2015年1期)2015-07-18
焊接(2015年1期)2015-07-18
中国自行车·骑行风尚(2014年4期)2014-10-10
铁道机车车辆(2012年4期)2012-11-27