
激光测距机距离交汇定位解法研究
2015-10-22 16:36刘爱东杜亚杰孙海文
现代电子技术 2015年19期
刘爱东 杜亚杰 孙海文

摘 要: 针对引导舰载机准确安全地着舰需要清楚舰载机真实的空间位置的需求,提出距离交汇的定位方法。已知三个点的坐标位置,求待测点的位置,可通过激光测距机测出三个已知点到待测点的距离,采用激光测距机进行距离交汇的定位方法,研究距离交汇定位的两种不同迭代解法,并分析两种解法,提出采用混合解法解决实际问题,给出距离交汇定位方法的适用范围,最后结合实例说明距离交汇定位法。
关键词: 激光测距; 距离交汇; 定位方法; 迭代法
中图分类号: TN249?34; P207 文献标识码: A 文章编号: 1004?373X(2015)19?0024?04
Abstract: Since the accurate and safe landing of the guidance carrier?based aircraft needs know the actual spatial position of the aircraft, a positioning method of distance intersection is proposed. The coordinate positions of three points are known to find the coordinate of the measured point, and it can be solved by using laser range?finder to measure the distances between the unknown point and the three known points, which is called the positioning method of distance intersection applied with laser range?finder. The two different iterative methods of distance intersection positioning are studied, and the two solutions are analyzed. The combined solution is proposed to solve the practical problems. The application range of distance intersection positioning method is provided. The validity of the proposed method was verified by combining with a practical example.
Keywords: laser range?finding; distance intersection; positioning method; iterative method
0 引 言
舰载机在着舰过程中,需要清楚舰载机的真实空间位置,着舰引导设备才能准确地引导舰载机安全着舰。目前,对海上运动目标进行动态定位,常用的方法是GPS定位法。对陆上的目标进行定位,可以采用空间测边交汇的解法,这是一个比较传统的陆上定位方法。本文将这种陆上定位方法应用到海上动态定位,可以在舰载机上设置激光合作目标,在甲板上的3个(至少3个)已知点设置激光测距机,并采用电视摄像机和红外摄像机对目标进行跟踪,通过测量已知点到舰载机的距离,从而求得待舰载机的三维坐标[1?2],本文将这种方法叫作激光测距机距离交汇定位法。但是,激光测距机距离交汇定位的解算是比较繁杂的。文献[3?6]介绍了空间测边交汇的解法,为激光测距机距离交汇定位的应用铺就了道路。本文就激光测距机距离交汇定位的解法和其适用范围进行简单研究。
1 激光测距机距离交汇定位模型
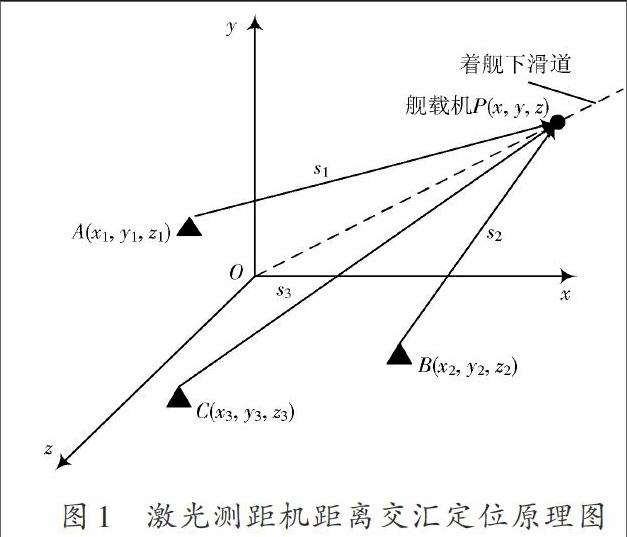
以理想着舰点[O]为坐标原点,[x]轴平行于着舰跑道中心线指向舰艉为正,[y]轴垂直于甲板面向上为正,建立坐标系如图1所示。
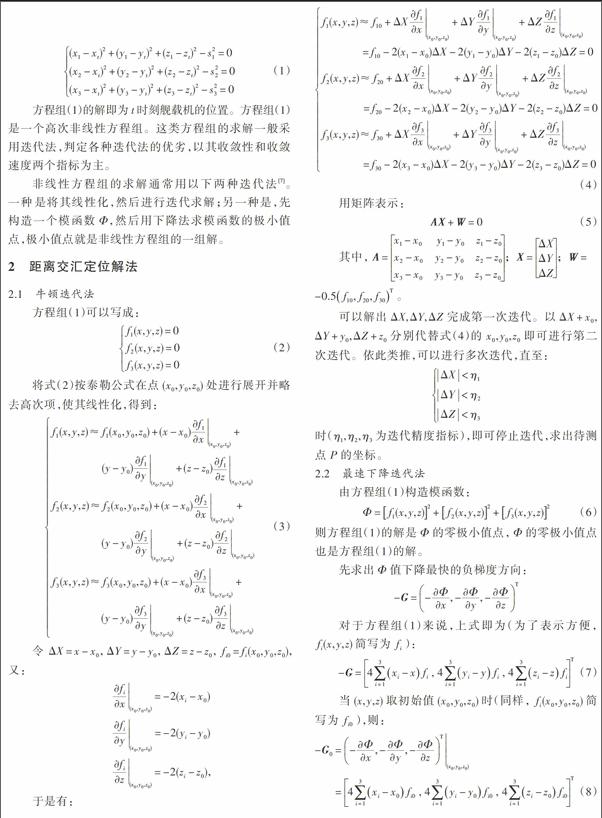
方程组(1)的解即为[t]时刻舰载机的位置。方程组(1)是一个高次非线性方程组。这类方程组的求解一般采用迭代法,判定各种迭代法的优劣,以其收敛性和收敛速度两个指标为主。
非线性方程组的求解通常用以下两种迭代法[7]。一种是将其线性化,然后进行迭代求解;另一种是,先构造一个模函数[Φ,]然后用下降法求模函数的极小值点,极小值点就是非线性方程组的一组解。
2 距离交汇定位解法
2.1 牛顿迭代法
由表2数据可知,无论采用理论值还是有误差的测量值,计算结果都在误差允许范围内满足条件。初始值越接近真值,收敛速度就越快。当选取的初始值与真值的差距达到一定程度时,计算结果出现错误,不收敛。因此,计算时初始值的选取十分重要。
(2) 采用最速下降迭代法进行计算
根据上一节最速下降迭代法的解算原理与过程,选择不同的初始值分别采用理论距离值和测量值进行计算,计算结果见表3。
由表3数据可知,无论采用理论值还是有误差的测量值,计算结果都在误差允许范围内满足条件。初始值越接近真值,收敛速度就越快。与表2数据进行对比,发现最速下降迭代法的收敛速度明显要慢很多。
(3) 采用混合解法进行计算
选择不同的初始值分别采用理论距离值和测量值进行计算,计算结果见表4。
将表4的计算结果和表2,表3进行对比可知,混合解法的收敛速度要优于单纯的最速下降迭代法,并且能保证选取任意初始值都能够收敛。
5 结 语
在海上进行实际定位时,由于海上环境复杂以及海浪的影响,舰体会发生横摇、纵摇、升沉等现象,激光测距机在坐标系中应保持惯性稳定,因此在进行距离交汇解算时,应对舰体的横摇、纵摇和升沉等信息进行补偿,保证激光测距机在坐标系中测距数据的正确性。
基于舰载机在着舰过程中需要掌握舰载机在空间的真实位置信息,本文对激光测距机距离交汇定位方法进行研究,提出距离交汇定位法的两种迭代解法,并对距离交汇定位方法进行分析,提出该方法的适用范围。通过实例进行编程计算,验证这两种迭代方法的正确性,并比较两种迭代方法各自的优缺点。结果表明,这两种方法正确可行,牛顿迭代法收敛速度快,但初始值选取不当会出现不收敛的情况;最速下降迭代法的收敛性与初始值的选取无关,但是收敛速度较慢。基于此结论提出混合解法,通过编程计算,混合解法的收敛速度要优于单纯的最速下降迭代法,并且能保证选取任意初始值都能够收敛。
参考文献
[1] 吴祖海.空间交会求三维坐标的新解法[J].长沙铁道学院学报,1995,13(1):7?10.
[2] 李全信.空间测边交会的直接解法、精度及应用条件[J].解放军测绘学院学报,1998,15(4):262?266.
[3] 曹幼元.空间测边交会法[J].测绘工程,1998,7(4):43?46.
[4] 李全信.空间测边交会的优化解法及精度分析[J].测绘工程,1999,8(3):40?46.
[5] 刘小玲,王俊.3R雷达系统交会算法及误差分析[J].兵器试验技术,2008(3):24?29.
[6] 李全信.根据三斜距确定点的三维坐标及精度[J].北京测绘,1999(2):6?11.
[7] 徐士良.数值分析与算法[M].北京:机械工业出版社,2007.
[8] 戴永江.激光雷达原理[M].北京:国防工业出版社,2002.
[9] 耿春萍,程度,张治.激光脉冲测距的测距精度及误差分析[J].光电应用技术,2007,22(2):28?31.endprint
猜你喜欢
中等数学(2022年8期)2022-10-24
应用数学(2020年4期)2020-12-28
测控技术(2018年6期)2018-11-25
通信电源技术(2018年5期)2018-08-23
制导与引信(2017年3期)2017-11-02
光学精密工程(2016年2期)2016-11-07
电测与仪表(2016年13期)2016-04-11
数学理论与应用(2016年1期)2016-02-28
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
应用数学与计算数学学报(2014年4期)2014-09-26
