
瞬时测频系统测LFM信号载频误差分析
2015-10-22 16:38陈晓威李彦志何文波
现代电子技术 2015年19期
陈晓威 李彦志 何文波
摘 要: 线性调频(LFM)信号是当前雷达广泛应用的一种信号形式。传统的瞬时测频(IFM)系统无法分析LFM信号的内部频率情况,所以会影响对LFM信号的测频准确性。通过简要介绍IFM的基本原理,分析了多路鉴相器组合的IFM系统的解频率模糊方法。在此基础上建立IFM系统处理LFM信号的模型,分析了引起IFM系统对LFM信号测频误差的原因。通过对理论分析结果进行仿真验证,为工程实际中的瞬时测频技术提供了理论参考。
关键词: 瞬时测频; 线性调频信号; 测频误差; 调频系数
中图分类号: TN917+.1?34 文献标识码: A 文章编号: 1004?373X(2015)19?0028?05
Abstract: Linear frequency modulation (LFM) signal is a signal form widely used by radars. Since the traditional instantaneous frequency measurement (IFM) system is unable to analyze the internal frequency structure of LFM signal,which can influence the frequency measurement accuracy of LFM signal,the fundamental of IFM is introduced briefly,and the frequency ambiguity resolution method of IFM system with multi-channel phase discriminators is analyzed. Based on this,the model of processing the LFM signal by IFM system was established,and the reason why frequency measurement error of LFM signal is generated by IFM system was analyzed. The results of theoretical analysis were simulated and verified,which provided a theoretical reference for IFM technology in engineering application.
Keywords: instantaneous frequency measurement; linear frequency modulation signal; frequency measurement error; frequency modulation coefficient
0 引 言
在电子战、信息战的环境中,使用战术电子侦察装备实时截获敌方电磁频谱信息、快速获取战术电磁情报和战场态势,为立即采取电子进攻或其他作战行动的战术目的服务,包括威胁告警和快速无源定位等已成为一种重要的技术手段和发展趋势[1]。其中敌方雷达信号的载频信息是电子情报不可缺少的一项重要内容。出于实时、快速的需要,战术电子侦察装备多采用瞬时测频(IFM)技术对电磁信号进行处理,从而获取频率信息。一方面,为了降低雷达在探测目标时被侦察方截获到的概率,当前各国在机载、地面广泛采用相控阵雷达,线性调频(LFM)信号是各类相控阵雷达的常用信号之一;另一方面,采用瞬时测频原理的战术电子侦察装备在1个脉冲信号持续时间内只进行1次频率测量,因而无法准确获取线性调频信号以及其他脉内调频信号的脉冲内部频率变化信息[2]。
因此,在当前技术条件下,传统的IFM系统处理LFM信号得到的频率测量结果是反映LFM信号的载频信息还是脉冲内部的其他频率信息,以及频率测量结果随LFM信号特征的变化规律是值得深入研究的重要问题;本文为此展开研究。
1 瞬时测频原理
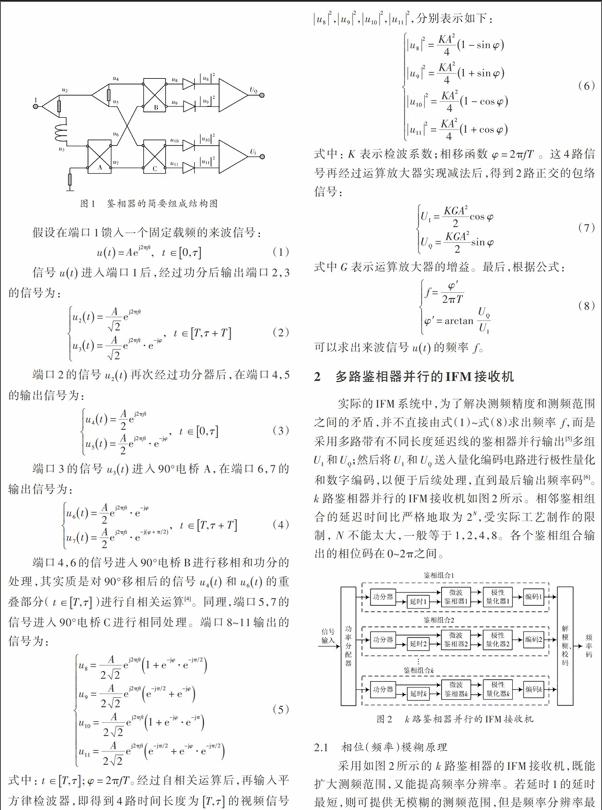
瞬时测频技术具有截获概率高、瞬时带宽宽、测频精度高、速度快、性价比高的优势。它采用相位自相关技术实现测频测量,能够有效地解决截获概率和频率分辨率之间的矛盾,使接收机不仅具有接近100%的截获,而且拥有[11 000]以上的频率分辨率[3]。IFM系统的核心部件为鉴相器,由3 dB耦合器、功分器加上延时线和平方律检波器构成。图1为鉴相器的简要组成结构图。
2 多路鉴相器并行的IFM接收机
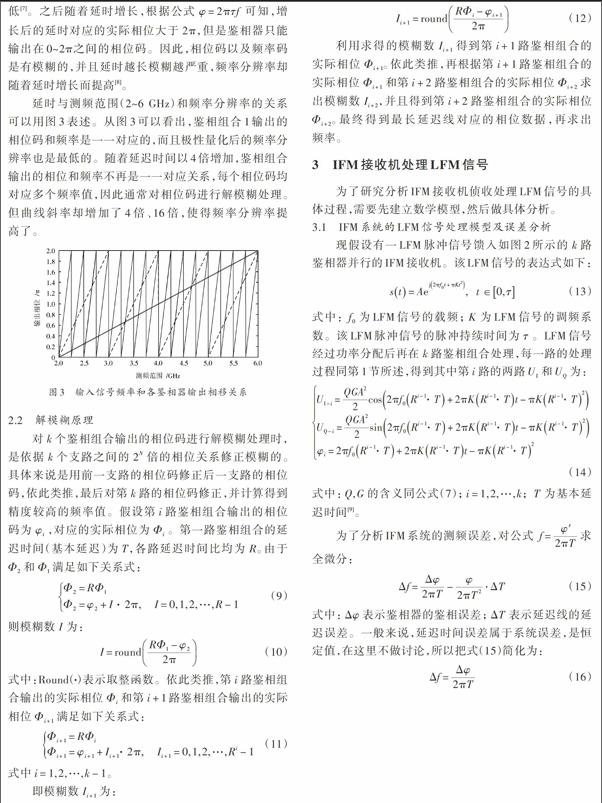
实际的IFM系统中,为了解决测频精度和测频范围之间的矛盾,并不直接由式(1)~式(8)求出频率[f,]而是采用多路带有不同长度延迟线的鉴相器并行输出[5]多组[UI]和[UQ;]然后将[UI]和[UQ]送入量化编码电路进行极性量化和数字编码,以便于后续处理,直到最后输出频率码[6]。[k]路鉴相器并行的IFM接收机如图2所示。相邻鉴相组合的延迟时间比严格地取为[2N,]受实际工艺制作的限制,[N]不能太大,一般等于1,2,4,8。各个鉴相组合输出的相位码在0~2π之间。
2.1 相位(频率)模糊原理
采用如图2所示的[k]路鉴相器的IFM接收机,既能扩大测频范围,又能提高频率分辨率。若延时1的延时最短,则可提供无模糊的测频范围,但是频率分辨率最低[7]。之后随着延时增长,根据公式[φ=2πτf]可知,增长后的延时对应的实际相位大于[2π,]但是鉴相器只能输出在0~2π之间的相位码。因此,相位码以及频率码是有模糊的,并且延时越长模糊越严重,频率分辨率却随着延时增长而提高[8]。
延时与测频范围(2~6 GHz)和频率分辨率的关系可以用图3表述。从图3可以看出,鉴相组合1输出的相位码和频率是一一对应的,而且极性量化后的频率分辨率也是最低的。随着延迟时间以4倍增加,鉴相组合输出的相位和频率不再是一一对应关系,每个相位码均对应多个频率值,因此通常对相位码进行解模糊处理。但曲线斜率却增加了4倍、16倍,使得频率分辨率提高了。endprint
2.2 解模糊原理
3 IFM接收机处理LFM信号
为了研究分析IFM接收机侦收处理LFM信号的具体过程,需要先建立数学模型,然后做具体分析。
3.1 IFM系统的LFM信号处理模型及误差分析
从式(16)可以看出,产生测频误差的根源是鉴相误差。鉴相误差主要来自鉴相器元件性能与理想状态偏差所引起的误差、IFM接收机内部噪声以及相位量化误差。考虑这3个影响因素时,IFM接收机不论测量哪一种类型信号的载频均会产生测频误差。现假设在理想条件下,不存在上述3种误差。此时IFM接收机测量单载频信号是没有误差的。但是由于IFM接收机在1个脉冲信号持续时间内只进行1次频率测量,因而无法准确获取线性调频信号的载频。即使在理想条件下,仍存在因LFM信号的特点引起的鉴相误差。在这个思路的启发下,本文再对LFM信号的鉴相输出进行研究。
3.2 LFM信号测频误差分析
式(18)表明,[finst]是输入信号相位[ψt]关于时间的导数,并且[finst]是关于时间变化的。为了获得信号的相位变化情况,需要对信号的脉冲进行采样。而IFM接收机能满足上述要求,它是属于采样接收机,采样频率[10]为20~40 MHz。当前的IFM接收机大多是对输入脉冲信号的脉冲前端进行一次采样的测频,得到瞬时频率。上述解释与第1节的瞬时测频原理在本质上是相同的。因为IFM接收机是对自相关后的信号相位进行采样的。
LFM脉冲信号的脉内频率是变化的,从而信号的相位是随时间变化的。结合式(14)和式(18)可知,信号的瞬时频率[fins]是随时间变化的。在解频率模糊时,在采样间隔内的瞬时频率变化量[Δfins]与测频无模糊周期[1Ri-1·T]相比,若较大并存在相位跳变,那么瞬时频率测量结果就可能出现错误。此外,IFM接收机1次采样的时刻偏离脉冲起始时间越大,也可能导致相位跳变,使得输出的频率较大地偏离LFM信号的载频。
4 仿真验证与分析
4.1 LFM信号测频误差仿真验证
为了验证本文提出IFM接收机对固定载频信号的测频精度,以及瞬时频率变化量[Δfins]对LFM信号测频精度的影响,采用Matlab软件进行了仿真验证。IFM接收机为4路延时鉴相组合的接收机,其测频范围在2~6 GHz之间,对应的最短延迟时间为0.25 ns。IFM接收机的延迟时间比设为4。
根据第3.2节的分析可知,IFM接收机对LFM信号的测频误差的大小取决于调频系数和采样时刻的乘积与测频无模糊周期(最小频率单元)的大小关系。为了详细验证LFM信号的2个特征(载频、调频系数)和IFM接收机自身参数对测频输出的影响,现在设置IFM接收机的参数:延迟时间比[R=4,]测频范围为2~6 GHz,IFM接收机的采样时刻为50~1 000 ns。LFM信号的调频系数变化范围为1~15 MHz/μs。
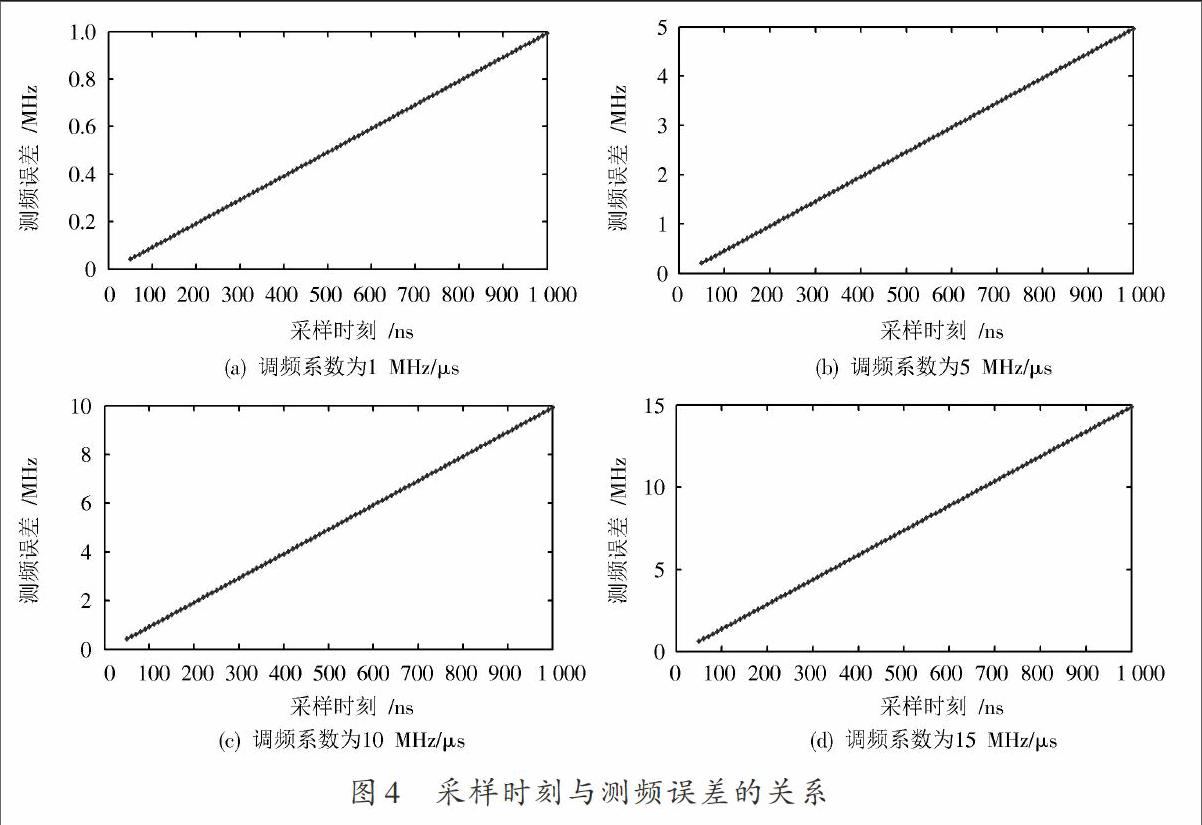
首先通过仿真观察采样时刻的选取对测频误差的影响。IFM接收机的采样时刻选取为50~1 000 ns。并且假设LFM信号载频为2 496 MHz,调频系数为1 MHz/μs, 5 MHz/μs,10 MHz/μs和15 MHz/μs。仿真得到图4所示的测频误差变化情况。
然后通过仿真观察调频系数的大小对测频误差的影响。LFM信号的调频系数变化范围为1~15 MHz/μs。选取IFM接收机的采样时刻为50 ns,200 ns,500 ns,800 ns。最后得到如图5所示的测频误差变化情况。
4.2 仿真结果分析
从以上建立模型、信号处理和最后的仿真验证可以看出,IFM接收机处理LFM信号是存在误差的。一方面,是由IFM接收机进行一次采样测频的时刻引起的;另一方面,是由LFM信号的调频系数引起的。从仿真图可以看到,测频误差的总体变化趋势随着采样测频时刻的推迟而变大,随着调频系数的增加而变大。综上,IFM接收机对LFM信号是存在测频误差的。
5 结 论
由以上的信号处理模型以及仿真验证表明,IFM系统在对LFM信号进行测频时,存在测频误差,该误差是由LFM信号的特点造成的。在实际电磁环境中,由于IFM接收机的性能与理想状态有所偏差,以及信号和接收机噪声的存在,会使得IFM接收机在测量LFM信号频率时相比单载频信号有更大的误差。错误的测频结果可能会影响相位干涉仪的测向精度,并有可能进一步影响目标辐射源电子情报的准确性。本文的理论分析结果对工程实际中IFM接收机处理LFM信号具有一定的指导意义,并且能够为改进IFM接收机提供理论参考。
参考文献
[1] 周一宇,安玮,郭福成.电子对抗原理[M].北京:电子工业出版社,2009.
[2] 王柏杉,杨连洪.雷达侦察设备对脉内调频信号分选识别方法探讨[J].舰船电子对抗,2011,34(3):23?25.
[3] 殷兆伟,秦建军,曹祥玉,等.IFM测量低信噪比信号能力研究[J].空军工程大学学报:自然科学版,2005(6):31?33.
[4] VINCI G, KOELPIN A, BARBON F, et al. Six?port?based direction?of?arrival detection system [C]// Proceedings of 2010 IEEE Asia?Pacific Microwave Conference. Yokohama: IEEE, 2010: 1817?1820.
[5] 段小翔.干涉比相法瞬时测频技术研究[D].南京:南京理工大学,2009.
[6] 陶荣辉.瞬时测频量化编码仿真[J].中国工程物理研究院科技年报,2004(1):236?238.
[7] 王星.航空电子对抗原理[M].北京:国防工业出版社,2008.
[8] 林象平.雷达对抗原理[M].北京:国防工业出版社,1981.
[9] 王洪迅,王士岩,王星,等.瞬时测频系统的线性调频信号分析及改进[J].兵工学报,2014,35(8):1193?1199.
[10] 唐永年.雷达对抗工程[M].北京:北京航空航天大学出版社,2005.endprint
