
视频序列中的目标检测
2015-10-22 16:57温馨武海健袁杰
现代电子技术 2015年19期
关键词:目标跟踪
温馨 武海健 袁杰
摘 要: 重点研究视频序列中运动目标的提取、跟踪、分类等问题,最终实现了一个完整的目标检测系统。首先,考虑到算法的复杂度和检测的实时性需求,优选了背景差与帧差相结合的检测方法,通过背景实时更新,达到了一个较好的检测效果。其次,充分考虑了卡尔曼滤波跟踪的简单、高效等特性,通过计算当前目标与候选目标之间的欧氏距离来寻找最佳匹配目标和区分相交物体。再者,提出了一种先用Adaboost算法获得各个目标的初分类,再采用BP神经网络对目标进行细分类的方法,实践证明,该方法在保证对绝大部分人、自行车、汽车有很好的分类效果外,对大部分杂物也能有较好的区分。最后,通过Matlab编程,设计并实现了一个完整的运动目标检测系统。
关键词: 目标提取; 目标跟踪; 目标分类; 目标检测系统
中图分类号: TN919?34 文献标识码: A 文章编号: 1004?373X(2015)19?0068?04
Abstract: The extraction, tracking and classification of moving target in video sequence are studied, and a whole target detection system was achieved. Considering the complexity of the algorithm and the real?time requirement of the detection, the detection method combining background difference with frame difference is optimized and selected, and a better detection effect was achieved by updating the background in real?time. Since Kalman filtering tracking is simple and efficient, the Euclidean distance between current target and candidate target is calculated to search for the best matching target and distinguish intersecting target. A novel method is proposed, which applies Adaboost algorithm to acquire the preliminary classification of each target, and makes use of BP neural network to classify the target in detail. The practical results prove that this method can ensure a preferable classification effect to majority of persons, cars and bikes, and distinguish most varia better. An integral detection system of moving target was designed and implemented by Matlab programming.
Keywords: target extraction; target tracking; target classification; target detection system
0 引 言
视频智能监控是计算机视觉领域中一个重要的研究分支,它以其准确、直观、实时和捕获信息丰富被应用于许多场合,关系到社会的安全防范和国家的长治久安。其中,基于图像序列的运动目标检测与跟踪技术是视频监控领域中的重中之重,也是计算机视觉系统中不可或缺的关键技术。近年来,有大量的运动目标检测算法相继被提出,目前,常用的运动目标检测方法可以归类为:光流法[1?2](Optical Flow)、背景差法[3?4](Background Subtraction)和帧差分法[5?6](Frame Difference)等,其中常用的背景模型包括混合高斯模型[7]、码本模型[8]等。目标跟踪系统可被认为是一个线性的、离散的高斯马尔科夫系统,通过一定的假设与估计,可对目标的状态方程与观测方程进行求解,从而达到目标跟踪的效果。如今研究较为热门的跟踪技术有:卡尔曼[9?10](Kalman)滤波跟踪、均值偏移[11](Mean?Shift)跟踪、粒子滤波(PF)[12]跟踪等。运动目标分类的主要目的是对检测到的前景区域所表示的目标类型进行区分,以备对不同类的目标进行不同的处理。
目前常用的分类方法主要包括神经网络[13]、Adaboost算法[14]和支撑向量机(SVM)[15]等。本文考虑到视频监控处理中所应满足的实时性和精确度要求,分别从运动目标检测、目标跟踪、目标分类三个方面进行研究设计,最终检索并分析出视频序列中特定目标的数量、颜色、出现和消失时间并生成记录文件,实现了一个高效的视频智能监控系统。
1 运动目标检测
Surendra算法[16]是一种快速自适应的背景更新方法,它通过当前帧与背景帧的差分图像或者利用帧间差分图像找到物体的运动区域,并对运动区域的背景部分保持不变,而非运动区域的背景以一定的速率用当前图像帧中对应的像素值进行替换更新。具体算法可以表述如下:
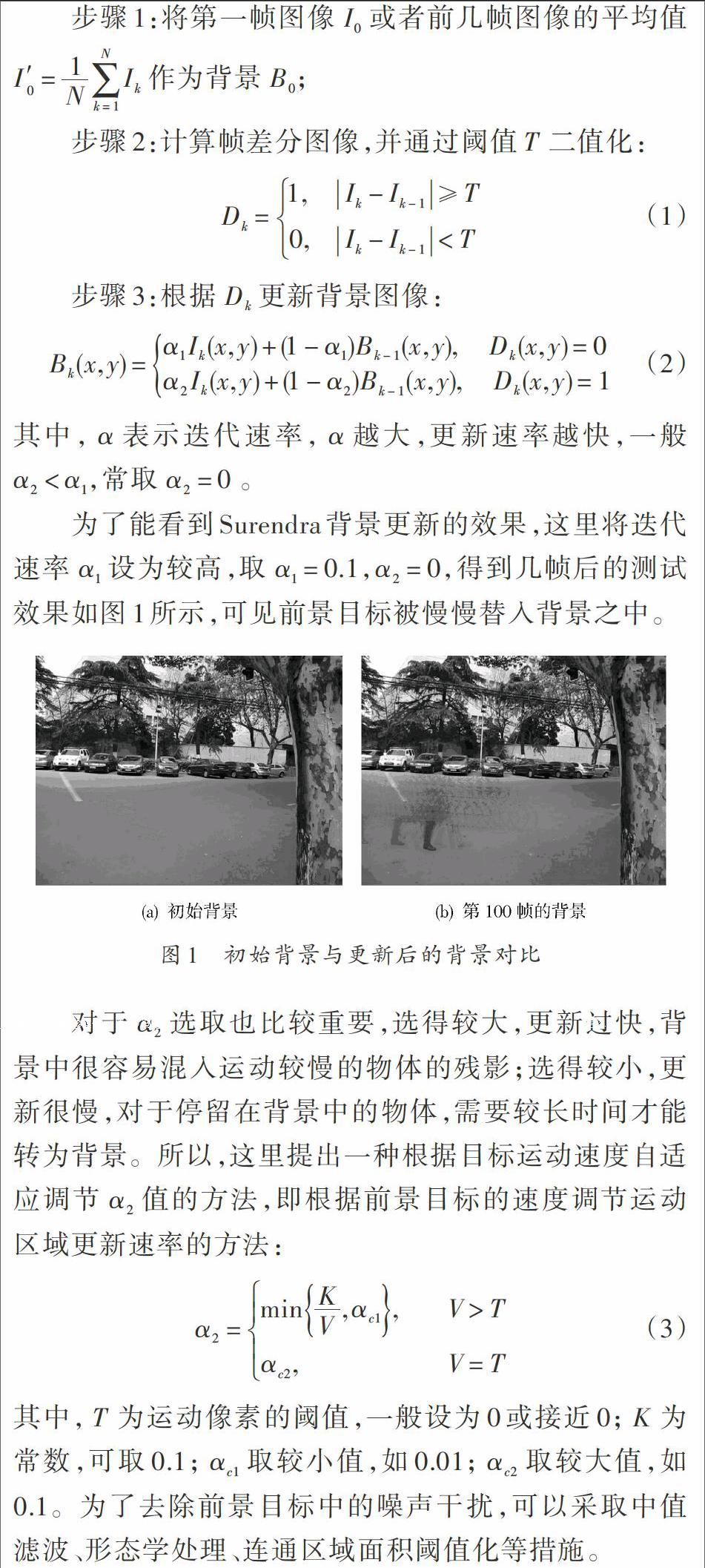
对于[α2]选取也比较重要,选得较大,更新过快,背景中很容易混入运动较慢的物体的残影;选得较小,更新很慢,对于停留在背景中的物体,需要较长时间才能转为背景。所以,这里提出一种根据目标运动速度自适应调节[α2]值的方法,即根据前景目标的速度调节运动区域更新速率的方法:endprint
其中,[T]为运动像素的阈值,一般设为0或接近0;[K]为常数,可取0.1;[αc1]取较小值,如0.01;[αc2]取较大值,如0.1。为了去除前景目标中的噪声干扰,可以采取中值滤波、形态学处理、连通区域面积阈值化等措施。
2 运动目标跟踪
运动目标跟踪技术发展至今,已经出现了很多算法及相应的改进措施,其中绝大多数跟踪算法都需要经过预测、匹配、更新等过程。本文充分考虑视频处理的实时性要求,提出了一种利用卡尔曼滤波预测目标运动轨迹,基于欧氏距离寻找匹配目标并判断目标相交与分离的方法。
2.1 卡尔曼滤波
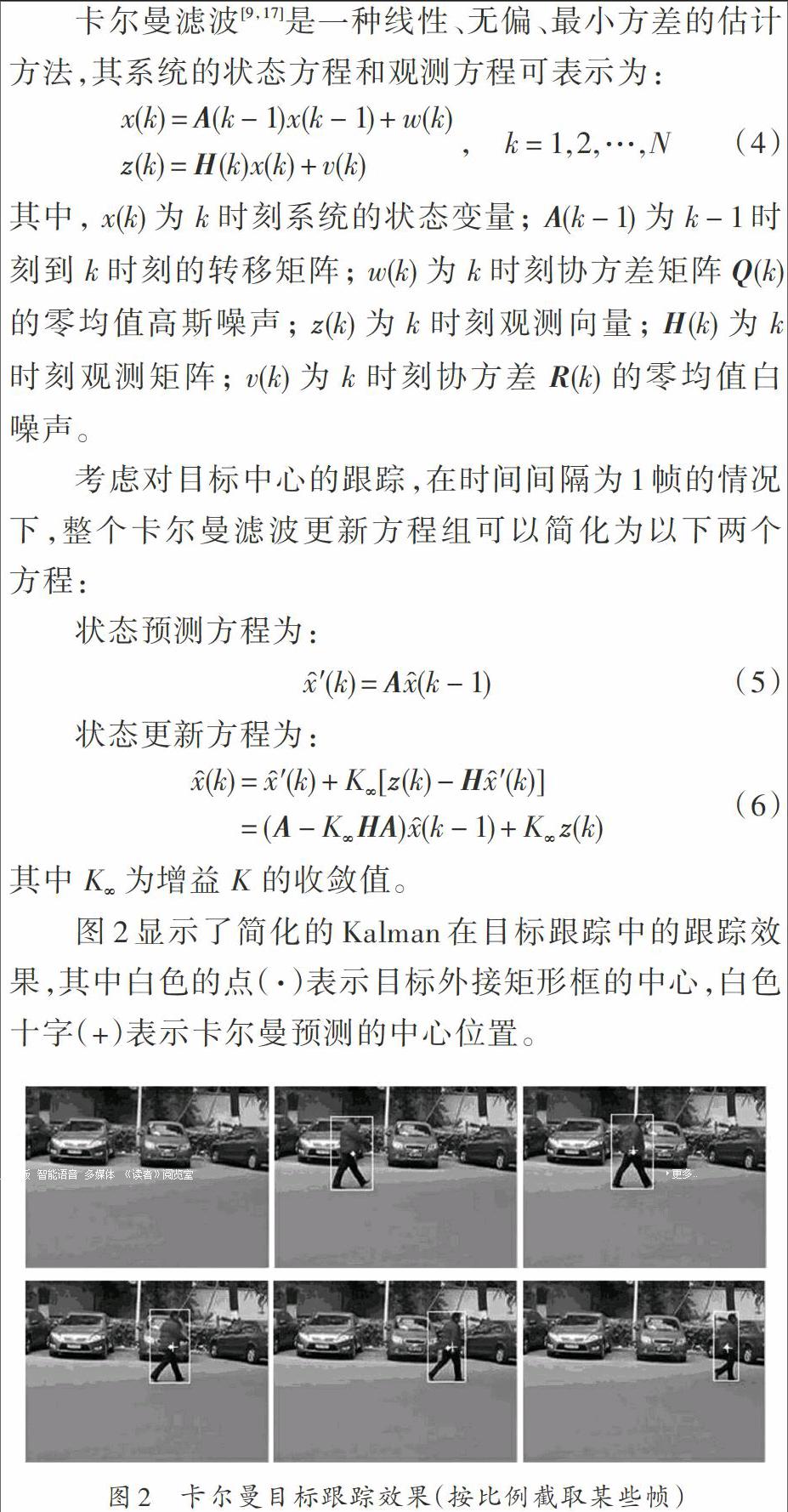
其中,[x(k)]为[k]时刻系统的状态变量;[A(k-1)]为[k-1]时刻到[k]时刻的转移矩阵;[w(k)]为[k]时刻协方差矩阵[Q(k)]的零均值高斯噪声;[z(k)]为[k]时刻观测向量;[H(k)]为[k]时刻观测矩阵;[v(k)]为[k]时刻协方差[R(k)]的零均值白噪声。
2.2 基于欧氏距离的运动目标相交检测
使用卡尔曼滤波器进行目标轨迹跟踪时,需要使用当前实际值进行状态更新,而目标相交时,通常很难得到单个目标实际的中心和长宽,故在状态更新时的实际测量值[z(k)]用预测值[x(k)]的前两行代替。
在处理运动目标相交时,首先要做的是如何判断目标相交和分离,以两个目标相交为例,介绍本文所采用的简单判断方法。
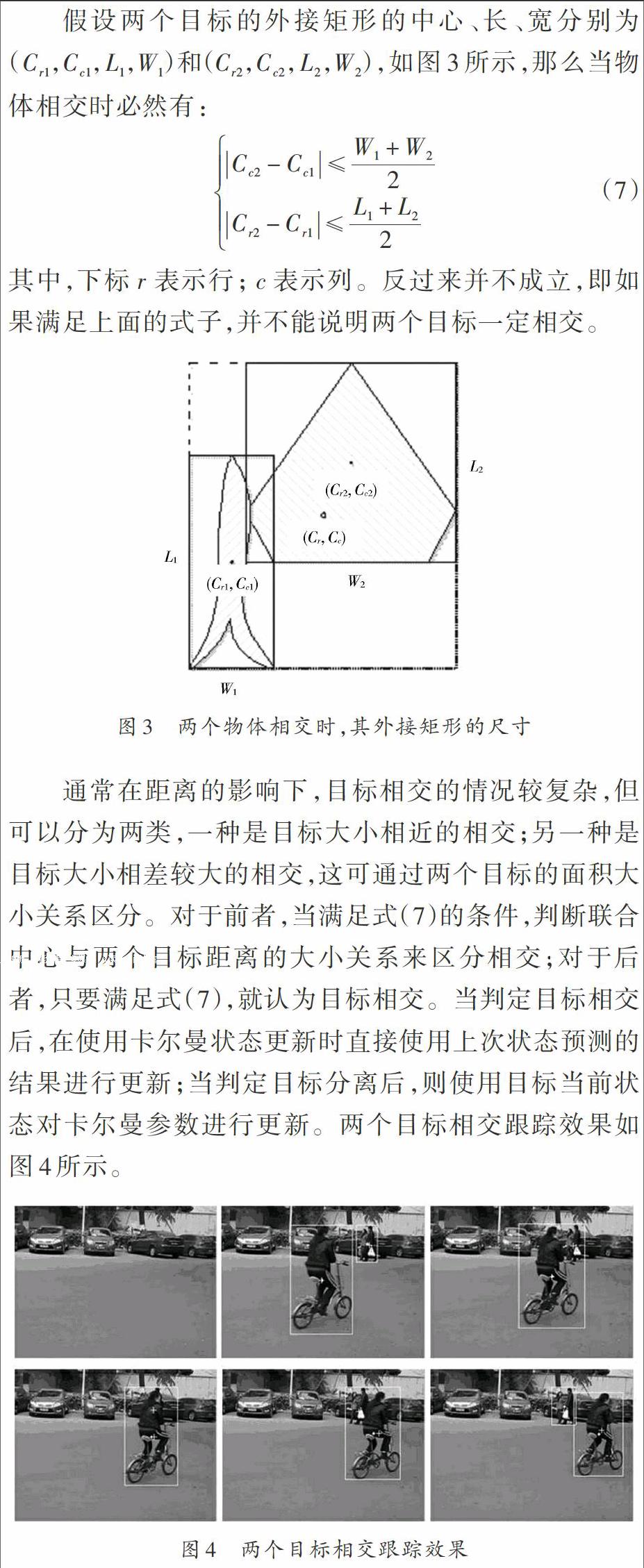
通常在距离的影响下,目标相交的情况较复杂,但可以分为两类,一种是目标大小相近的相交;另一种是目标大小相差较大的相交,这可通过两个目标的面积大小关系区分。对于前者,当满足式(7)的条件,判断联合中心与两个目标距离的大小关系来区分相交;对于后者,只要满足式(7),就认为目标相交。当判定目标相交后,在使用卡尔曼状态更新时直接使用上次状态预测的结果进行更新;当判定目标分离后,则使用目标当前状态对卡尔曼参数进行更新。两个目标相交跟踪效果如图4所示。
从图4中可以看出,在目标相交后,由于采用匀速直线运动模型,当物体运动的速度或尺寸有变化时,会对卡尔曼跟踪造成一些影响,一般情况下,物体间相交的时间不长,故影响不大,当物体分开后,可以很快收敛。
3 运动目标分类
通过Adaboost算法进行目标分类的结果如表1所示,其中测试样本由100人、100辆自行车、50辆汽车组成,共250个目标;杂物由表1所示样式组成。
在测试过程中发现,有些自行车样式很接近单个人的外形,用简单的特征训练成的强分类器并不能对其很好的分类。所以,为了减少杂物的干扰,本文提出了一种使用模板计算互相关系数作为BP神经网络[13,18]的输入,然后进一步对目标分类,以提高对非有效目标的分类效果的方法。
首先采集大量的人、自行车、汽车二值的图像,分别转换到特定的大小,比如,人转为100×50像素,自行车转为60×60像素,汽车转为40×100像素。然后对各组图像取平均值,将获得的结果作为计算系数的模板,如图5所示。
采用本文的目标分类方法后,得到的分类效果如表2所示。
从表2中可以看到,采用本文的方法不但使人、自行车、汽车分类更加准确,更将杂物的分类准确率提高到原来的8倍以上,大大减少了杂物带来的干扰,使整个系统变得更加可靠。
4 结 语
本文分别从运动目标检测、目标跟踪、目标分类三个方面进行研究设计,最终检索并分析出视频序列中特定目标的数量、颜色、出现和消失时间并生成记录文件。在目标检测阶段,提出一种帧间差分法和减背景技术相结合的运动目标检测方法,采用中值滤波、结合形态学处理及面积阈值化等方法去除噪声,同时对背景图像实时更新,以减少光照等扰动的影响;在目标跟踪分析阶段,提出一种简化的Kalman滤波跟踪算法,并结合目标特征之间的欧氏距离寻找最佳匹配目标,从而获取目标运动轨迹,分析了目标相交分离所需满足的条件,较好地处理了多目标跟踪中的部分问题;在目标分类研究设计中,提出一种先用Adaboost算法对多目标进行初分类,再结合模板计算互相关系数,并使用BP神经网络进行再分类的方法。经测试,该方法能较好地检测出人、自行车和汽车等物体,并对干扰目标有很好的区分;最后本文将目标检测、跟踪和分类等过程相结合,实现了一个实用、高效的目标检测系统。
参考文献
[1] HUANG Jinjie, JIANG Yongfu. An improved approach to calculation of the optical flow field for color image sequences [C]// Proceedings of 2010 International Forum on Strategic Technology. Ulsan: IEEE, 2010: 312?317.
[2] INDU S, GUPTA M, BHATTACHARYYA A. Vehicle tracking and speed estimation using optical flow method [J]. International Journal of Engineering Science and Technology, 2011, 3(1): 429?434.
[3] ENRIQUE J, SANCHEZ F, DIAZ J, et al. Background subtraction based on color and depth using active sensors [J]. Sensors, 2013, 13(7): 8895?8915.
[4] THIND B T. Background subtraction techniques?review [J]. International Journal of Innovative Technology and Exploring Engineering, 2013, 2(3): 166?168.endprint
[5] LIAN Xiaofeng, ZHANG Tao, LIU Zaiwen. A novel method on moving?objects detection based on background subtraction and three frames differencing [C]// Proceedings of 2010 International Conference on Measuring Technology and Mechatronics Automation. Changsha, China: IEEE, 2010: 252?256.
[6] 薛丽霞,罗艳丽,王佐成.基于帧间差分的自适应运动目标检测方法[J].计算机应用研究,2011,28(4):1551?1552.
[7] 胥欣,江登表,李勃,等.混合高斯模型运动检测算法优化[J].计算机应用研究,2013,30(7):2190?2194.
[8] KIM K, CHALIDABHONGSE T H. Real?time foreground?background segmentation using codebook model [J]. Real?Time Ima?ging, 2005, 11(3): 172?185.
[9] PATEL H A, THAKORE D G. Moving object tracking using Kalman filter [J]. International Journal of Computer Science and Mobile Computing, 2013, 4(2): 326?332.
[10] KAUSHIK S. 3D real?time tracking and recognization of moving object using Kalman filter [J]. International Journal of Engineering Research, 2013, 2(7): 438?441.
[11] SUN Jian. A fast Meanshift algorithm?based target tracking system [J]. Sensors, 2012, 12(6): 8218?8235.
[12] 白笛,张冰,朱志宇.目标跟踪的自适应双重采样粒子滤波算法[J].计算机科学,2013,40(3):248?250.
[13] [加] HAYKIN S.神经网络与机器学习[M].申富饶,徐烨,郑俊,等译.3版.北京:机械工业出版社,2011.
[14] CHANG H L, YUE Taiwen. Entropy?directed AdaBoost algorithm with NBBP features for face detection [J]. Information Technology Journal, 2011, 10(8): 1518?1526.
[15] ATHIRAJA A, BARANIDHARAN A, VIGNESH S, et al. The efficient SVM kernel method for image compression and image recognition [J]. International Journal of Advanced Computer Research, 2012, 2(1): 55?60.
[16] GUPTE S, MASOUD O. Detection and classification of vehicles [J]. IEEE Transactions on Intelligent Transportation Systems, 2002, 3(1): 37?47.
[17] 黎洪松.数字视频处理[M].北京:北京邮电大学出版社,2006.
[18] 朱凯,王正林.精通Matlab神经网络[M].北京:电子工业出版社,2010.endprint
猜你喜欢
科技创新与应用(2016年36期)2017-02-21
电脑知识与技术(2016年27期)2016-12-15
航空兵器(2016年5期)2016-12-10
科技视界(2016年5期)2016-02-22
哈尔滨理工大学学报(2015年5期)2016-01-19
科技与创新(2015年12期)2015-07-21
数字技术与应用(2014年12期)2015-05-04
科技与创新(2015年5期)2015-04-20
农业科技与装备(2014年10期)2015-01-14
