三维刚性剑杆织机引纬和打纬机构的设计研究
2015-12-19 06:37韩斌斌王益轩梁瑜洋
纺织器材 2015年6期
韩斌斌,王益轩,路 超,梁瑜洋,赵 梅
(1.北京星航机电装备有限公司 研发中心,北京 100600;2.西安工程大学 机电工程学院,西安 710048)
0 引言
随着科技的发展,许多应用领域都对复合材料的性能提出更高要求,同时,也引领着复合材料的发展——轻量化是复合材料发展的重要趋势。传统的轻质复合材料预成型件,主要是采用铺层缝制的方法,在使用过程中通常会因低速冲击或剪切载荷等原因发生分层破坏[1]。为了克服这些不足,采用了三维织造方法制成的三维间隔机织物作为复合材料预成型件;该织物结构不但具有轻质、高强的特性,还具有良好的整体性、层间性及抗冲击等性能[2]。
三维间隔机织物可以在稍加改造的二维织机上织造,尤其宜采用刚性剑杆织机对其开口机构、引纬机构及打纬机构进行改造。鉴于篇幅的原因,笔者仅介绍引纬和打纬机构。针对不同幅宽的织物,引纬机构的形式有:空间连杆引纬,导杆引纬及电磁引纬。打纬机构主要采用既在后死心位置具有较长静止时间,又具有良好安装制造性能的六连杆打纬机构,而六连杆打纬机构又有长筘座脚和短筘座脚之分,其适用性各不相同。由此可见,研究不同形式的引纬和打纬机构及其最佳组合形式是十分必要的。
1 引纬和打纬机构的组合
开口、引纬和打纬机构相互配合,使织造过程顺利进行。笔者设计的用于织造间隔机织物的三维织机,采用由伺服电机控制的多页综框的电子开口机构。在确定开口机构的型式后,根据织物幅宽确定引纬和打纬机构是否联动(联动情况下,剑杆的运动由筘座运动和引纬机构合成;分离情况下,引纬和打纬机构各自独立运动,剑杆运动和筘座运动各自独立);保证顺利引纬的情况下确定引纬机构的结构尺寸及空间布局,确定采用哪种形式的引纬机构,之后再确定打纬机构的形式。笔者在大量仿真分析的基础上提出了如表1所示的组合。图1是其中一种组合形式下的三维织机机身虚拟样机模型。
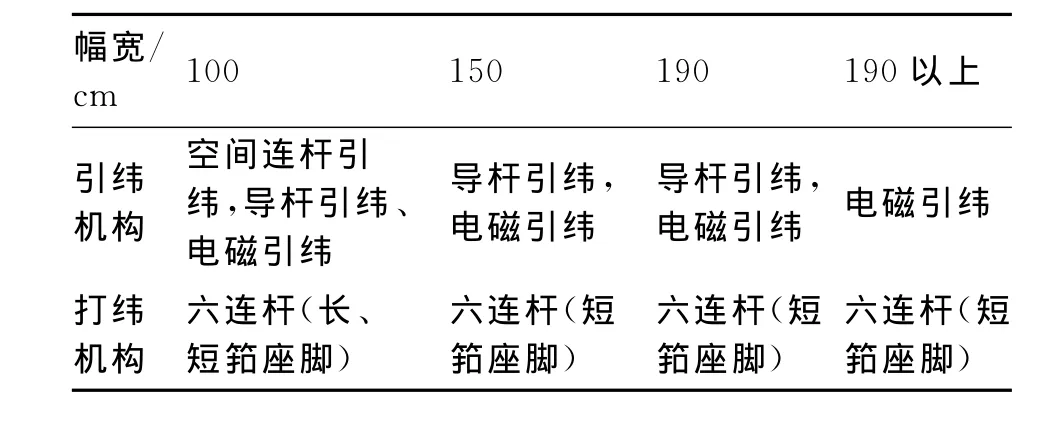
表1 不同幅宽织物所采用的引纬和打纬机构
图1 三维织机虚拟样机模型
2 刚性剑杆引纬机构
引纬机构均采用双侧布置、中央交接的引纬方式,送纬侧、接纬侧同时各引4支剑;还可以根据织物所需的纬纱数,安装不同数量的剑。
2.1 空间连杆引纬
空间连杆引纬是传统刚性剑杆织机所采用的引纬方式,剑杆传动是由打纬机构的筘座运动和引纬机构合成、打纬机构和引纬机构联动。
2.1.1 空间连杆引纬的工作原理
空间连杆引纬机构主要由两套平面四连杆机构、一套摇杆滑块机构及空间连杆组成,如图2所示。机构的工作原理:主轴O1通过曲柄摇杆机构(1,2,6和机架)使摇杆6(筘座)相对于O点摆动,同时借助带传动轴O2;轴O2通过曲柄摇杆机构(8,9,10和机架)带动连杆9作平面运动;空间连杆7通过球面副A和B将连杆9与角形摆臂杆3连接起来,并将连杆的运动传递给角形摆臂杆;角形摆臂杆3的短臂O4A绕O4点上下摆动时,角形摆臂的长臂带动投剑杆4左右摆动,驱动安装在投剑板上的剑杆往复摆动,投剑杆的下端则在滑槽内上下运动[3-4]。图2为ADAMS平台上的仿真设计模型。
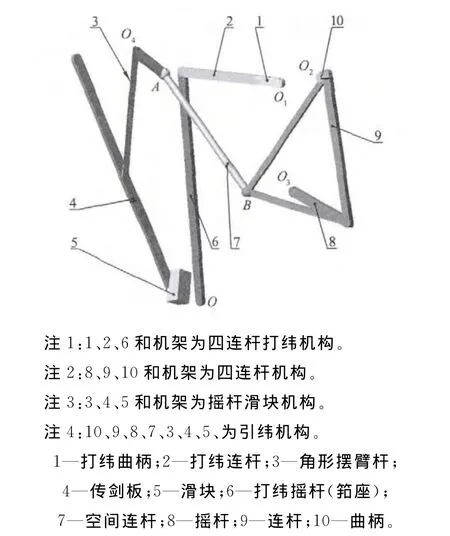
图2 ADAMS中的空间连杆引纬机构
2.1.2 空间连杆引纬的仿真及分析
仿真时,主轴O1的转速设置为180°/s,仿真时间设置为2s,在此期间主轴一转,引纬机构完成一次引纬。图3为接纬剑的运动规律曲线。
由接纬剑(送纬剑)的运动规律曲线可知,剑杆的有效动程为623.12mm,超出了接纬剑动程的460mm~530mm;同时,动程可调,符合织机幅宽为100cm的要求;空动程的最大值为55mm,在20mm~70mm适宜的范围内;在要求暂停的区域285°~310°中,剑杆位移的均方差值小于0.5mm,相对静止较为理想;无回跳问题[5]。
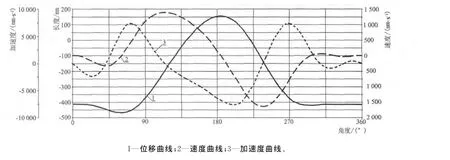
图3 接纬剑的运动规律曲线
2.2 导杆引纬
采用牛头刨床式导杆机构作为三维织机的刚性剑杆引纬机构,两套导杆机构分别装在墙板外侧,由两台伺服电机分别传动控制,引纬和打纬机构各自独立运动,剑杆运动和筘座运动各自独立。剑杆工作时速度平稳,减小对纬纱的冲击,有利于引纬;回程时速度较快,减少引纬时间,提高织造效率。
2.2.1 导杆机构的工作原理
导杆机构的工作原理如图4所示,在ADAMS平台仿真设计模型中,原动件曲柄作圆周运动,通过滑块带动摆杆左右摆动;摆杆在摆动时,又借助连杆推动剑杆左右移动,完成送纬和接纬。
2.2.2 导杆引纬的仿真及分析
仿真时将两台电机的转速都设置为360°/s、转向相反;且为了保证送纬剑和接纬剑准确交接,设置了时间差,仿真时间为2s;分别得到引纬机构的位移曲线、送纬剑(或接纬剑)的运动规律曲线,如图5、图6所示。
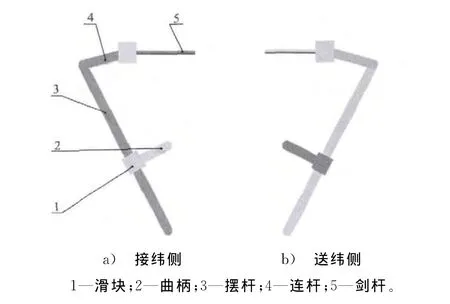
图4 ADAMS中的导杆引纬机构
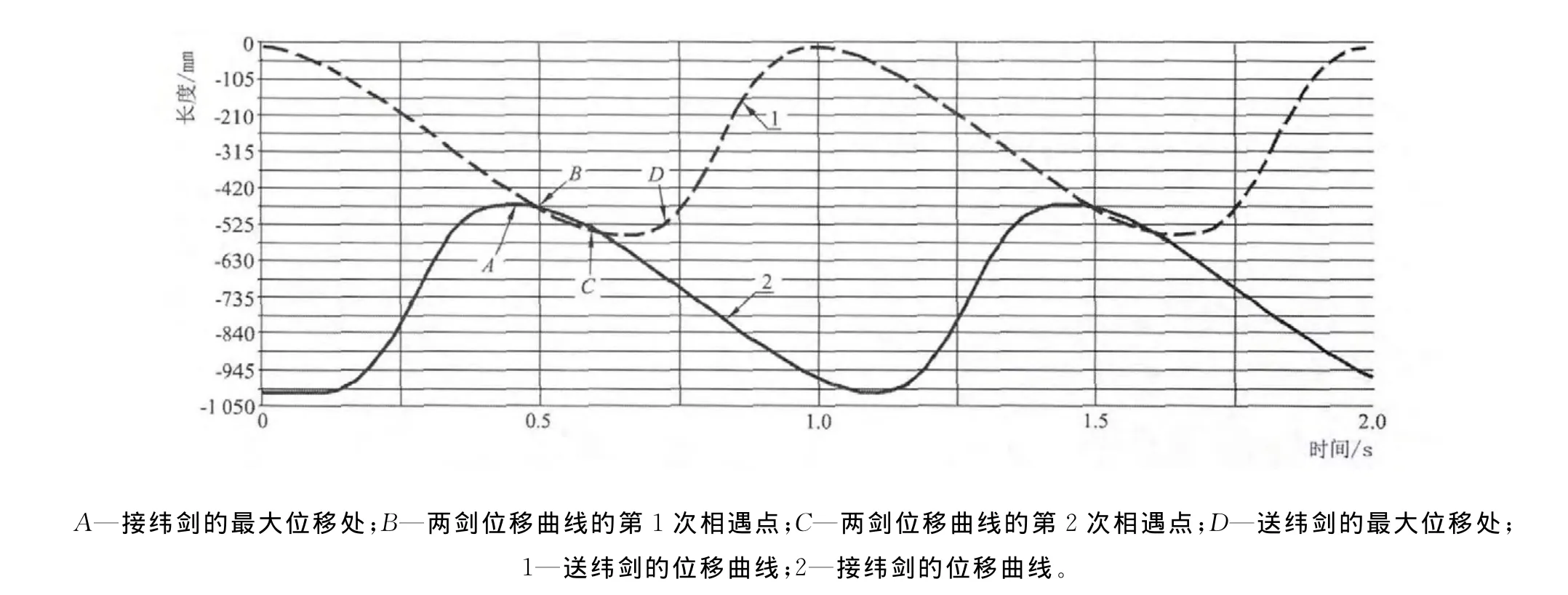
图5 引纬机构的位移曲线
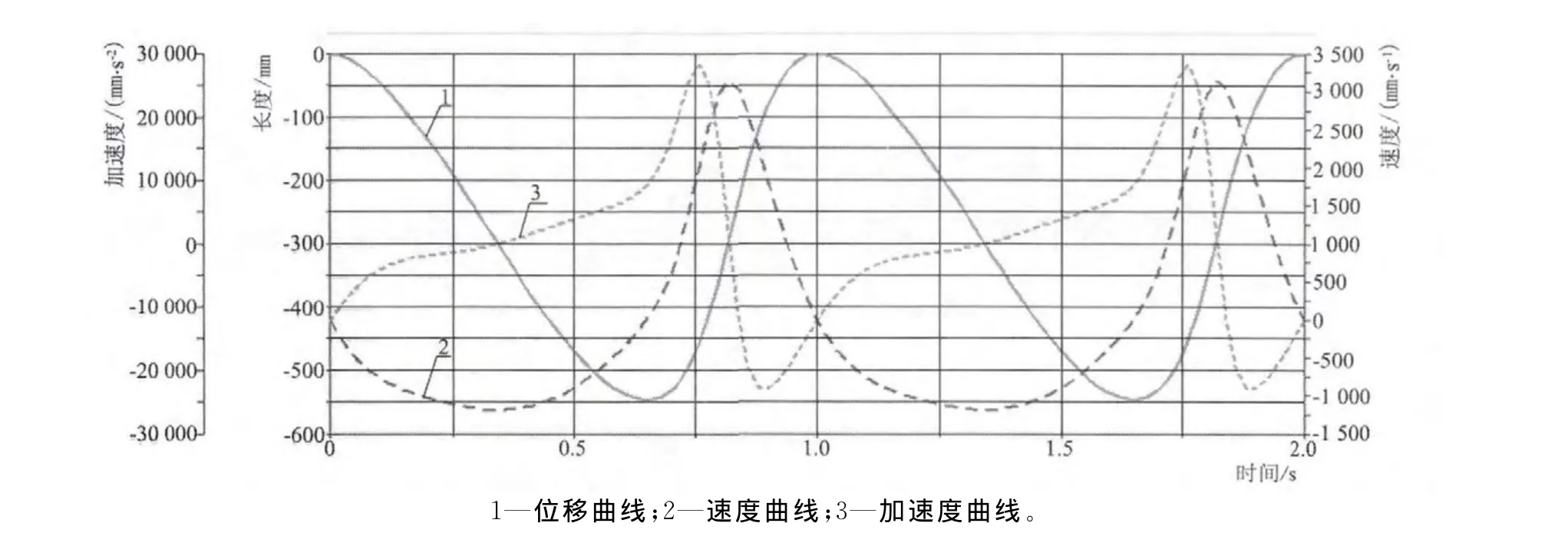
图6 送纬剑的运动规律曲线
由图5可知,接纬剑先到达梭口中央A处开始近似短暂停顿至B点;之后自B点开始后退的过程中,在B点与送纬剑(还未到达梭口中央)相遇并开始交接;接纬剑继续后退而送纬剑继续前进(两剑同向运动),接纬剑和送纬剑同向运动到C点再次相遇而完成交接;这时送纬剑几乎到达梭口中央开始短暂停顿,至D点送纬剑开始后退,两剑杆之间存在交接冲程。采用这种交接方式,使两剑在交接时不易失误,并且交接时纬纱所受到的冲击力也小。
由图6可知,单侧剑杆的动程接近550mm,采用两侧布置的形式,剑杆的总动程为1 100mm,适用于幅宽为100cm的织机;剑杆工作时,加速度波动较小、速度较为平稳,有利于引纬、减少断头率;剑杆回程时,速度较高,缩短了回程的时间,提高引纬效率。
2.3.1 单边扁平型永磁直线同步电动机的组成及工作原理
单边扁平型永磁直线同步电动机主要由初级(动子)、绕组、永磁体和次级(定子)组成。移动初级是一个三相线圈,绕组封装于环氧树脂中,运动线圈绕组配备位置霍尔传感器,用于电动机绕组电压电流控制;次级定子由多极磁轭构成任意长度的轨道如图7所示。其工作原理为:直线电动机绕组通入三相正弦电流后产生气隙磁场,通常称之为行波磁场,永磁体的励磁磁场与行波磁场相互作用后产生电磁推力;在电磁推力的作用下,初级动子就会沿行波磁场运动方向做直线运动[7]。图7为Ansoft Maxwell 2D平台上的仿真设计模型。
2.3 电磁引纬
对于三维织机采用的多剑杆引纬而言,电磁引纬就是利用直线电动机直接传动多个刚性剑杆同时进行引纬;而直线电动机是一种将电能直接转换成直线运动机械能、且不需要任何中间转换机构的传动装置。直线电动机凭借结构简单、高速、大推力、精度高等特点,广泛地应用于工业、民用、军事及其它各种直线运动的场合[6]。
刚性剑杆固定在动子上与其一起运动,通过直接控制动子运动顺利引纬;可选用美国Baldor公司的永磁直线同步电动机,也可自行设计,传剑速度最大可达5m/s,引纬和打纬机构各自独立运动,剑杆运动和筘座运动各自独立。本文的引纬方式采用单边扁平型永磁直线同步电动机,下面介绍它的组成及工作原理,并进行仿真设计。
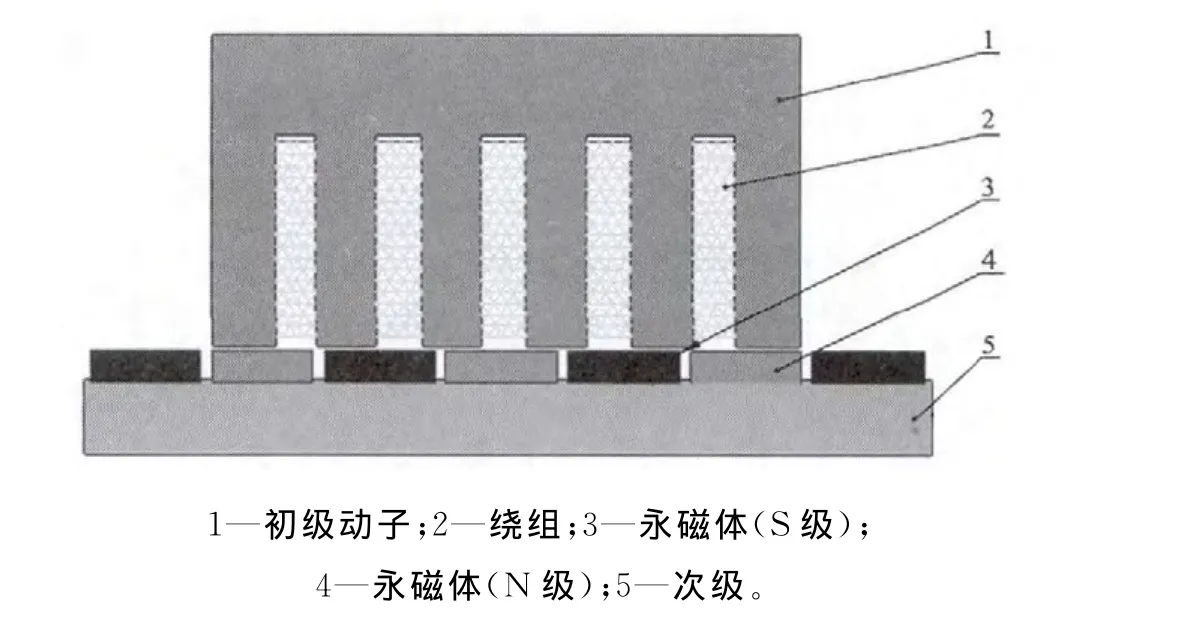
图7 Ansoft Maxwell 2D中的单边扁平型永磁直线同步电动机机构
2.3.2 单边扁平型永磁直线同步电动机的仿真
对自行设计的单边扁平型永磁直线同步电动机进行仿真,以说明采用直线电动机引纬的可行性。仿真速度设为2m/s,提取了0.05s和0.1s时的磁力分布线图,如图8所示。
3 打纬机构
目前,织机一般采用四连杆、六连杆及共轭凸轮打纬机构。四连杆打纬机构结构简单、制造容易,但不能保证在打纬后死心位置有较长的停顿时间;共扼凸轮打纬机构可使筘座在后死心位置处完全静止,并且根据需要静止时间可达200°以上(较长的静止时间有利于引纬),但凸轮的安装及制造精度很高;六连杆打纬机构既能保证筘座在打纬后死心位置附近有较长的停顿时间,又具有良好的机构动态性能及制造安装性能[8-9]。
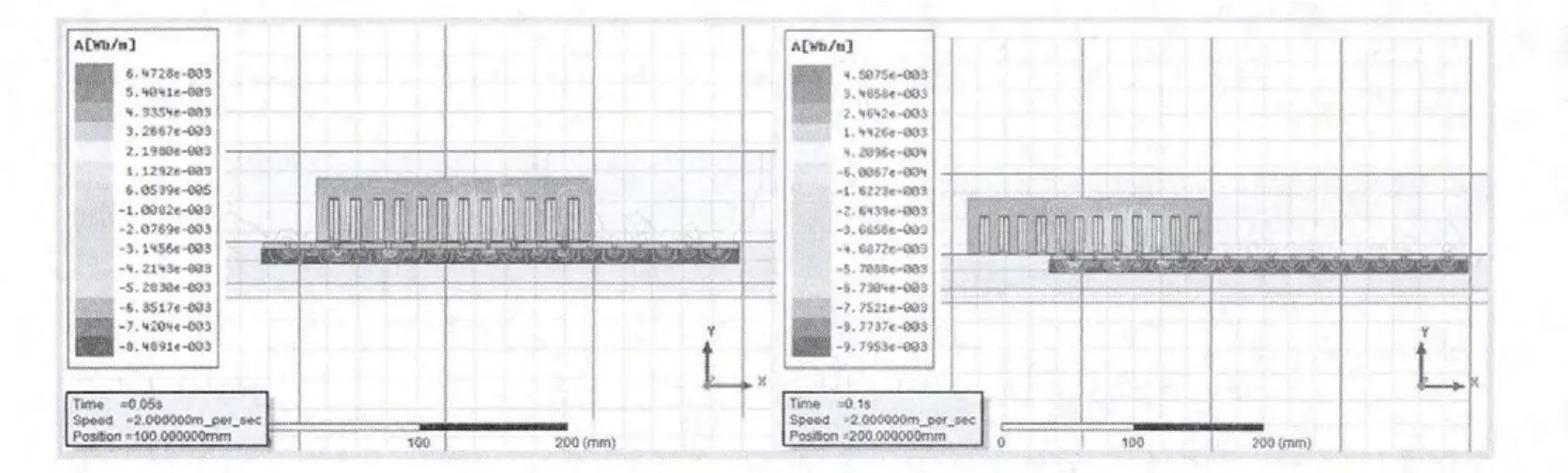
图8 磁力分布线图
3.1 打纬机构的工作原理
六连杆打纬机构由两套四连杆机构串联而成,如图9所示。以长筘座脚的六连杆打纬机构为例,其工作原理为:主轴电机通过带传动将旋转运动传递给曲柄,驱动曲柄绕主轴O整周回转;随着曲柄回转,通过第一连杆使第一摇杆绕中间轴O1摆动;再通过第二连杆,使安装在第三摇杆上的筘座绕摇轴O2往复摆动,从而驱动打纬机构进行打纬。
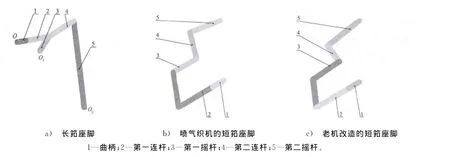
图9 ADAMS中的六连杆打纬机构
3.2 打纬机构的仿真及分析
六连杆打纬机构又有长筘座脚和短筘座脚之分,选用哪种形式的打纬机构,主要由引纬机构的形式决定。分别对空间连杆引纬中的四连杆打纬机构和三种形式的六连杆打纬机构在ADAMS中建模,并进行仿真设计,得到它们的运动规律曲线,见图10~图13。
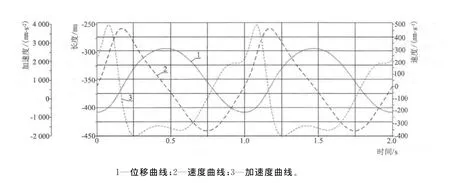
图10 长筘座脚六连杆打纬机构运动规律曲线
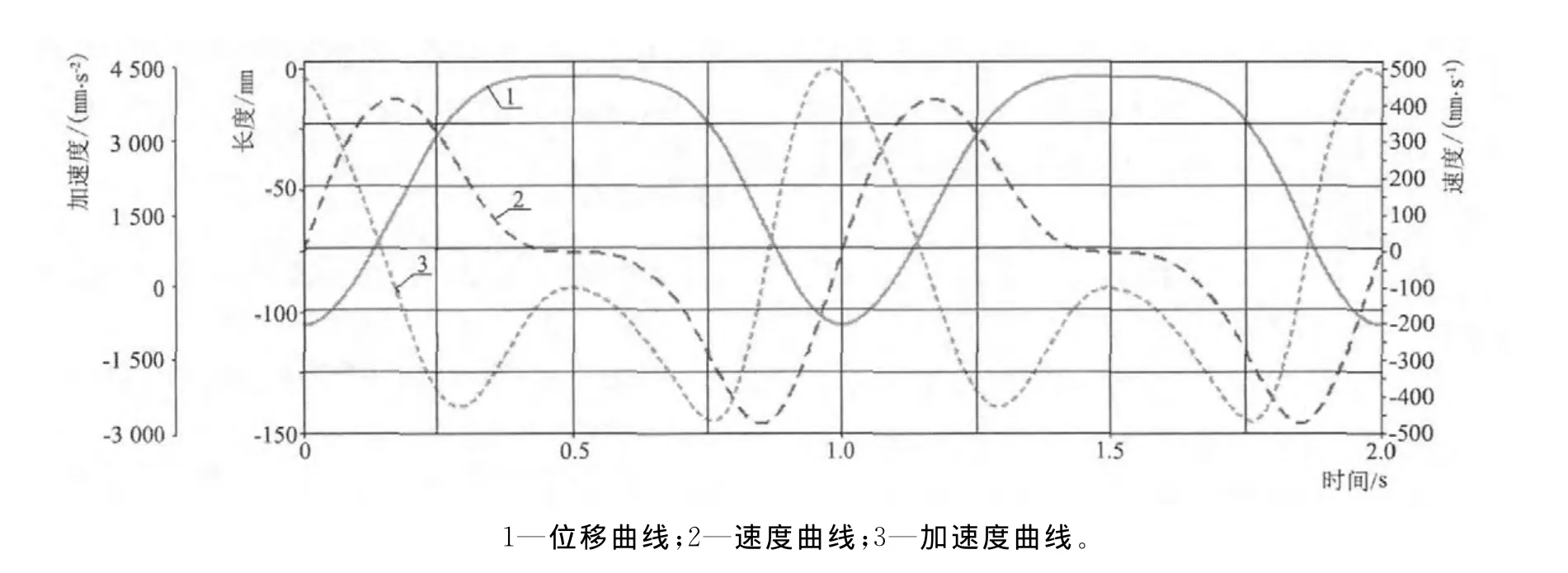
图11 短筘座脚喷气织机的六连杆打纬机构的运动规律曲线
图12 老机改造的短筘座脚六连杆打纬机构运动规律曲线
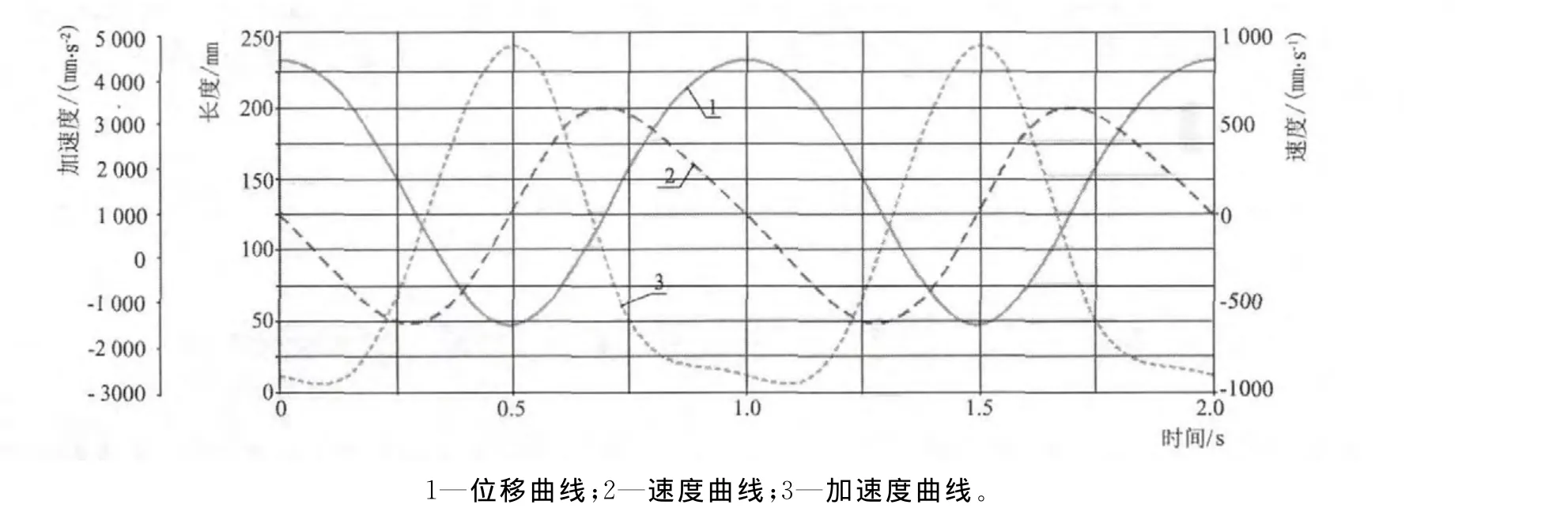
图13 四连杆打纬机构运动规律曲线
由图10、图13可知,长筘座脚六连杆打纬机构的运动规律比四连杆打纬机构的运动规律稍好,并未完全发挥六连杆在后死心位置具有较长静止时间的优势;但这并未影响它的应用,因为长筘座脚六连杆打纬机构与引纬机构联动,即在整个打纬过程中,剑杆和筘座始终相对静止有充足的时间进行引纬。
由图11、图12可知,喷气织机的短筘座脚六连杆打纬机构和老机改造的短筘座脚六连杆打纬机构具有几乎相同的运动规律曲线。由位移曲线可知,筘座的相对静止时间约为160°,剑杆可以在静止不动的筘座上长时间飞行而有利于引纬;由速度和加速度曲线可见机构的运动较为平衡,具有良好的动态性能[10]。虽然老机改造的短筘座脚六连杆打纬机构,不会出现与开口机构和引纬机构干涉的现象;但该机构尺寸较大造成安装空间较大,尽量不采用。
4 结论
鉴于篇幅的原因,笔者仅对幅宽为100cm的织物仿真设计了三种不同的引纬机构,为了保证机构能达到预期的工艺要求,各个构件的尺寸是在参照现有机构的基础上,通过仿真优化后得出的,通过仿真分析并得出以下结论。
4.1 采用空间连杆引纬时,选用长筘座脚六连杆打纬机构;采用导杆引纬和电磁引纬时,可选用喷气织机的短筘座脚六连杆打纬机构和老机改造的短筘座脚六连杆打纬机构。
4.2 长筘座脚六连杆打纬机构和长筘座脚四连杆打纬机构的运动规律相似,长筘座脚的六连杆打纬机构在后死心位置的静止时间不长,不能充分发挥六连杆打纬机构的优势,但并不影响引纬;因为采用空间连杆引纬时才选用长筘座脚的六连杆打纬机构,空间连杆引纬的引纬机构和打纬机构联动,剑杆可在运动着的筘座上运动。
4.3 喷气织机的短筘座脚六连杆打纬机构和老机改造的短筘座脚六连杆打纬机构的运动规律相同,但老机改造的六连杆打纬机构的尺寸较大,占据较大的安装空间,实际中尽量不采用。
4.4 通过不同幅宽系列三维间隔织物织机整机虚拟样机模型的建立、装配及协同仿真分析,可确定不同形式的开口、引纬和打纬机构的最优组合。
5 结语
通过对三种不同形式的引纬和打纬机构进行仿真分析,可知这三种引纬和打纬机构不仅能满足工艺要求,而且各具特点。合理地选择引纬和打纬机构的组合形式,可以达到织造不同幅宽三维间隔机织物的要求,拓宽了织物的应用领域,为三维织机引纬和打纬机构的设计研究提供了更为广阔的思路。
[1]曹海建.三维机织整体中空复合材料的结构及性能研究[D].无锡:江南大学,2010.
[2]谈蔚.三维机织物的性能特征与常规设计[J].国外丝绸,2013(6):3-6.
[3]刘裕瑄,陈人哲.纺织机械设计原理[M].北京:纺织工业出版社,1982.
[4]华大年,唐之伟.机构分析与设计[M].北京:纺织工业出版社,1985.
[5]姜怀,华大年,缪元吉,等.SFJ型剑杆织机上PL-SSRR型引纬机构的分析综合和最优化设计[J].上海纺织科技,1984(2):5-13.
[6]叶云岳.直线电机原理与应用[M].北京:机械工业出版社,2006.
[7]聂永峰.永磁直线同步电机设计研究[D].上海:上海交通大学,2009.
[8]王长通.织机连杆打纬机构的分析[J].中原工学院学报,2004,15(6):44-46.
[9]袁守华,赵天奇.六连杆打纬机构计算机辅助设计[J].郑州纺织工学院学报,1992,3(2):57-64.
[10]马世平.基于MATLAB 的六连杆打纬机构优化设计及仿真[J].纺织学报,2006,27(3):40-42.
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
石油矿场机械(2022年3期)2022-06-17
纺织科学研究(2021年7期)2021-12-02
纺织科技进展(2021年5期)2021-07-22
装备制造技术(2020年2期)2020-12-14
汽车实用技术(2017年16期)2017-09-21
纺织科学研究(2017年4期)2017-05-17
纺织科学研究(2017年1期)2017-05-17
现代工业经济和信息化(2016年12期)2016-05-17
化纤与纺织技术(2015年1期)2015-12-26