
拦截高速机动目标偏置比例制导律研究
2016-01-15 01:13李辕,赵继广,闫梁等
装备学院学报 2015年5期
赵继广,男,教授,博士生导师。
拦截高速机动目标偏置比例制导律研究
李辕1,赵继广2,闫梁3,白国玉1,樊世平4
(1. 装备学院 研究生管理大队,北京 101416;2. 装备学院 装备发展战略研究所,北京 101416;
3. 北京跟踪与通信技术研究所,北京 100094;4. 63601部队)
摘要针对制导过程中碰撞角约束问题,提出了一种偏置比例导引律。该导引律采用时变的自适应导航比,兼备了顺轨和逆轨拦截能力,并可拦截高速机动目标和低速机动目标。针对机动目标推导了时变偏置角速率偏差的平面解析解,并且给出了自适应导航比的表达式;将平面制导律向三维扩展,给出了二维加速度与三维总加速度的计算关系,提出了三维期望碰撞角的实现方法。通过与3种导引律对比,验证了所提出导引律在碰撞角误差、脱靶量和控制力等方面均有优势。
关键词制导律;比例导引;偏置比例导引;碰撞角;机动目标
作者简介李辕(1986-),男,博士研究生,主要研究方向为航天任务分析与设计。bartholomew_lee@hotmail.com
中图分类号V412.1
文章编号2095-3828(2015)05-0071-06
DOI文献标志码A 10.3783/j.issn.2095-3828.2015.05.016
Biased Proportional Navigation Guidance Law for Maneuvering
Targets Interception with Angular Constraints
LI Yuan1,ZHAO Jiguang2,YAN Liang3,BAI Guoyu1,FAN Shiping4
(1. Department of Graduate Management, Equipment Academy, Beijing 101416, China;
2. Equipment Development Strategy Research Institute, Equipment Academy, Beijing 101416, China;
3. Beijing Institute of Tracking and Telecommunications Technology, Beijing 100094, China;
4. 63601 Troops, China)
AbstractA new biased proportional navigation (BPN) guidance law is proposed to solve out the problem of the impact angle constrains. With the time varying adaptive navigation ratio, the guidance law has both head-pursuit and head-on interception ability, and is able to intercept high or low speed maneuvering targets. The paper derives the time varying biased angle ratio solution aimed to maneuvering targets on plane and then gives the adaptive navigation ratio expression. By expanding planar navigation law to three-dimensional navigation law, the paper derives the calculation relationship between 2-D acceleration and 3-D acceleration, and gives the expected impact angle implement method of 3D guidance. In comparison with other three guidance laws, the paper shows that the proposed method has advantage in impact angle error, miss distance and control effort.
Keywordsguidance law; proportional navigation; biased proportional navigation; impact angle; maneuvering targets
比例导引[1-3]( Proportional Navigation,PN)及其变体,因其易实施性及有效性被广泛应用于跟踪制导律。仅能保证脱靶量为零的制导律已无法满足需求,带约束碰撞角的制导律已成为研究热点。
KIM[4]首先提出碰撞角约束问题,并引入时变反馈增益的方法用以解决;LU[5]在非线性条件下提出的闭环自适应比例导引律,通过时变的制导参数实现期望碰撞角;SHIMA[6]提出了基于最优控制和微分对策理论的角约束制导律;RATNOO[7]使用分段导引的办法在不同阶段采用不同增益,以达到期望碰撞角。
偏置比例导引[8](Biased Proportional Navigation,BPN)律是在比例导引律的基础上引入一个额外的角速率偏差,以实现预定拦截。BYUNG[9]首次将BPN用以实现碰撞角约束,提出的时变偏置比例导引律(Time Varying Biased Proportional Navigation,TV-BPN)无需对剩余飞行时间进行估计,但其仅适用于低速目标。JEONG[10]在BYUNG的基础上提高了制导律的鲁棒性,并给出了偏置项的精确解析解,但由于公式所限,仅能拦截特定区域内的目标。
由此可见,如果制导律在满足约束碰撞角的基础上,能进一步扩大捕获区域,将极大地提高制导律对不同目标的适用性。本文提出一种能在顺/逆轨模式下分别拦截高/低速目标的制导律,并能满足约束角需求,提升了制导律的捕获区域。
1平面制导律设计

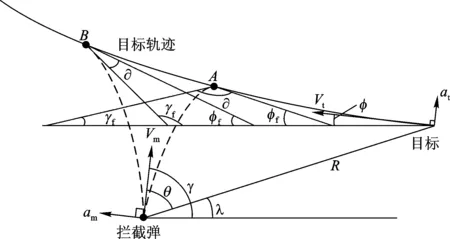
图1 弹目平面几何关系
制导方程如下:
(1)
(2)
(3)
式中:N为导航比。
对式(1)微分后得
(4)
将式(2)与式(3)代入式得
(5)
(6)
式中:tf为最终拦截时间;t为当前时间。
将式(6)代入式(5)得
根据文献[12]定义有效导航比为
(8)
将式(8)代入式(7)得
(9)
(10)

对式(10)从t0到t积分得
(11)
在拦截弹与目标碰撞时刻,t=tf,λf为末视线角
(12)
认为t0为当前时刻t,整理式(12)得
(13)
式中:tgo为剩余飞行时间;λf的表达式在三维导引律实现方法(2.2节)中给出。
加速度指令表达式根据文献[1]可得
(14)
式中:导航比N为时变值,其表达式根据式(8)得
(15)
式中取有效导航比N′为定值,则N值随接近速度Vc和框架角余弦cos(γ-λ)发生变化。由于γ-λ接近0或π时会导致导航比过大而失效,因而设定导航比阀值δ。
当cos(γ-λ)<0时,取
当cos(γ-λ)>0时,取
2三维制导律实现
2.1 三维加速度
在平面制导基础上实现三维制导律的思路[13-14],是将三维制导问题分解到2个垂直平面分别实施制导解算,将二者求得的加速度合并至三维以实施制导。定义偏航(yaw)平面为拦截弹所在水平面,俯仰(pitch)平面为弹目所在铅垂面,如图2所示。
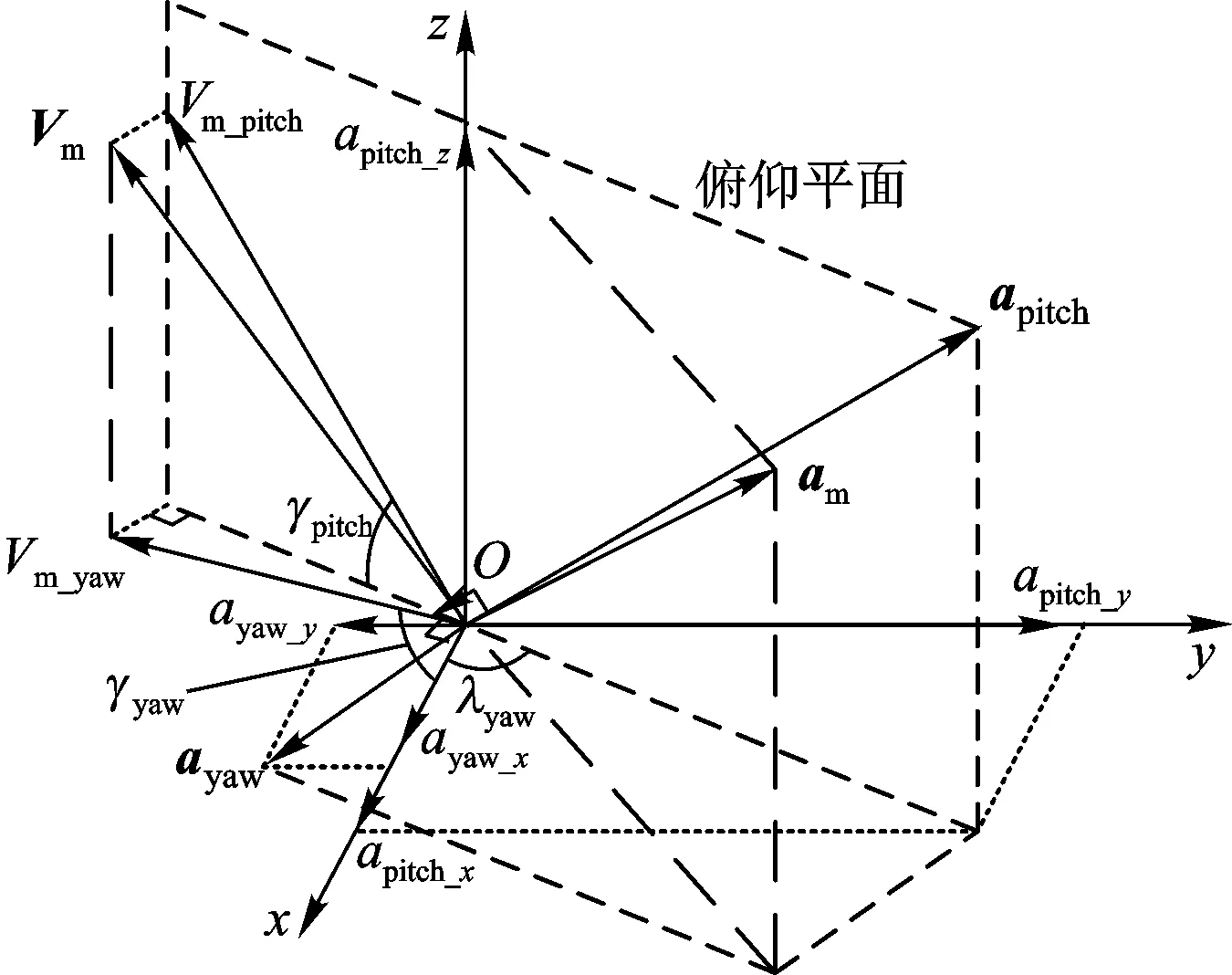
图2 俯仰平面与偏航平面的空间关系
其中,坐标原点O为拦截弹位置,γpitch为拦截弹在俯仰平面的路径倾角,γyaw为拦截弹在偏航平面的路径倾角,λyaw为偏航平面的视线角,各平面速度均与加速度垂直。由图可知:
(16)
(17)
各平面的加速度按照式(14)解算求得,并最终合成空间内的总加速度如下:
(18)
2.2三维碰撞角
在三维条件下,拦截弹按照期望碰撞角拦截目标的关键,是将空间的期望碰撞角∂分解至偏航和俯仰2个平面,得出各自平面的末视线角用以制导。在整个拦截过程最后瞬间,可以认为拦截弹与目标处于平行接近状态,如图3所示。O为坐标系原点,T为目标所在位置,M为拦截弹所在位置,A为碰撞点;λyaw与λpitch分别为所求的偏航平面与俯仰平面的末视线角。
图3 碰撞角三维几何关系
求解过程如下:

(19)
则在空间中,选择任意与TA垂直于B点且长度为s的线段外端作为拦截弹位置,都可为满足期望碰撞角∂。为解决此问题,由A指向T观察目标与拦截弹位置关系,如图4所示。
图4 AT视角弹目几何关系
ε为碰撞旋转角,其取值决定M点的空间位置,即拦截弹速度矢量Vm。M处于不同位置都有其相应解,故ε可任意取值。
图3中,MB垂直于AT,故s为M点与AT的距离,则图4中AM长度为s。可求得MH长度为
d=ssinε
(20)
图3中MH垂直于AOT平面,而AOT平面即为图4中AH所在虚线,故2图中MH长度相等,均为d。根据所做辅助线,还存在如下关系:
|AB|=c=scot∂
(21)

(22)
(23)
目标水平路径倾角为
(24)
(25)
弹目水平距离|M′T|为
(26)
根据三角定理,弹目距离为
(27)
俯仰平面末视线角为
(28)
需要指出的是:如果拦截最后瞬间,目标速度垂直于水平面,如图5所示。
图5 目标速度垂直水平面时的弹目几何关系
此为图3的特殊情况,s与m重合,俯仰平面末视线角计算公式不变,偏航平面末视线角可取任意值。
3仿真实验
仿真目的:验证提出制导律的有效性,分别从碰撞角误差、脱靶量和控制力等方面进行对比验证。在不考虑碰撞角的情况下,提出制导律比例系数取正和负时,分别与PN和RPN相似;对于带约束碰撞角的情况,与TV-BPN具有类似特性。故而选取PN、RPN和TV-BPN作为对比对象。拦截弹进入失效距离后,重复之前制导指令。仿真在MATLAB环境中进行,仿真参数见表1。
表1 仿真参数
表2 拦截机动目标方案参数
通过分析可得出如下结论:
图6 拦截机动目标仿真结果
2) 从图6c)可知,提出制导律的加速度收敛性比TV-BPN更好。在实际制导过程中,末段需用过载过大会导致系统的稳定性变差。TV-BPN在接近目标时,由于其偏置角速率的时变特性导致其过载增大,引起脱靶量和碰撞角误差增大,如表2第4~6列所示。
3) 如图6a)所示,方案3与方案5由于在偏航平面和俯仰平面上的初始角不同,引起导航比正负值不同,导致拦截模式的顺逆轨差异。图6b)为偏航平面的拦截过程:拦截低速目标时,初始速度倾角和视线角分别为γ=30°和λ=82°,由式可得N>0,则制导律采用逆轨拦截模式;拦截高速目标时,初始速度倾角和视线角分别为γ=-45°和λ=82°,N<0,采用顺轨模式拦截。由此可见,制导律的导航比在不同初始条件下取值不同,并可决定拦截模式。导航比随时间变化的曲线如图6e)、图6g)所示,其中方案2的回凹部分是由对框架角余弦cos(γ-λ)的限制所造成。
4) 图6f)、图6h)中的偏置角速度随时间变化,引起路径倾角变化并最终达到期望碰撞角,如图6d)所示。
4结 束 语
针对机动目标,设计了一种能够实现末约束碰撞角的制导律。在该制导律中,给出了时变自适应导航比,并提出了将平面制导律扩展到三维制导律的有效方法。通过PN、RPN和TV-BPN 3种制导律对比仿真,验证了提出制导律的有效性和拦截不同目标的制导性能优势。鉴于该制导律针对不同速度目标均具有良好适应性,则可对多功能制导武器开发提供一定的理论依据。下一工作将围绕制导律的导航比展开研究,以解决其在制导前期过大从而导致控制加速度过大的问题。
参考文献(References)
[1]MURTAUGH A S,CRIEL H E.Fundamentals of proportional navigation[J].IEEE Spectrum,1966,3(12):75-85.
[2]GUELMAN M.Proportional navigation with a maneuvering target[J].IEEE Transactions on Aerospace and Electronic Systems,1972,AES-8(3):364-371.
[3]SIOURIS G M.Comparison between proportional and augmented proportional navigation[J].Nachrichtentechnische Zeitschrift,1974,27(7):278-280.
[4]KIM M,GRIDER K V.Terminal guidance for impact attitude angle constrained flight trajectories[J].Aerospace and Electronic Systems,IEEE Transactions on,1973,AES-9(6):852-859.
[5]LU P,DOMAN D B,SCHIERMAN J D.Adaptive terminal guidance for hypervelocity impact in specified direction[J].Journal of Guidance,Control,and Dynamics,2006,29(2):269-287.
[6]SHIMA T,GOLAN O M.Linear quadratic differential games guidance law for dual controlled missiles[J].Aerospace and Electronic Systems,IEEE Transactions on,2007,43(3):834-842.
[7]RATNOO A,GHOSE D.Impact angle constrained interception of stationary targets[J].Journal of Guidance,Control,and Dynamics,2008,31(6):1816-1821.
[8]SHUKLA U S,MAHAPATRA P R.Optimization of biased proportional navigation[J].IEEE Transactions on Aerospace and Electronic Systems,1989,25(1):73-79.
[9]BYUNG S K,JANG G L,HYUNG S H.Biased PNG law for impact with angular constraint[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(1):277-288.
[10]JEONG S K,CHO S J,KIM E G.Angle constraint biased PNG[R].Melbourne,Australia:Institute of Electrical and Electronics Engineers Inc.,2004:3,1849-1854.
[11]ZARCHAN P.Tactical and strategic missile guidance[M].Reston:American Institute of Aeronautics and Astronautics,2007:31.
[12]SIOURIS G M.Missile guidance and control systems[M].New York:Springer,2004:195-196.
[13]ULYBYSHEV Y.Terminal guidance law based on proportional navigation[J].Journal of Guidance,Control,and Dynamics,2005,28(4):821-824.
[14]DOU L,DOU J.Three-dimensional large landing angle guidance based on two-dimensional guidance laws[J].Chinese Journal of Aeronautics,2011,24(6):756-761.
[15]ERER K S,MERTTOPCUOGLU O.Indirect impact-angle-control against stationary targets using biased pure proportional navigation[J].Journal of Guidance,Control,and Dynamics,2012,35(2):700-703.
(编辑:李江涛)
