
智能移动式果蔬采摘机器人设计——基于SOPC神经网络
2016-03-23 04:25邓荣
农机化研究 2016年8期
邓 荣
(重庆工程职业技术学院,重庆 402260)
智能移动式果蔬采摘机器人设计——基于SOPC神经网络
邓荣
(重庆工程职业技术学院,重庆402260)
摘要:果蔬采摘机器人一般采用移动式机器人,虽有着强大的计算能力和移动性,但其感知能力的局限性限制了其智能的发展。为了提高果蔬采摘机器人的智能移动性能,使其拥有更好的实现自主导航的能力,采用(system on a programma-ble chip,SOPC)微处理器系统设计了一种新的智能移动式机器人控制系统,并采用神经网络算法对其进行了优化,大大提高了机器人移动的精确性,增强了输入和输出的线性关系,使控制系统在单片芯片上实现了复杂系统的全部功能。通过测试发现:机器人的移动躲避障碍物时速度的稳定性较好,移动误差较低,实现了果蔬采摘无人控制下的智能移动。
关键词:果蔬采摘机器人;智能移动;自主导航;SPOC技术
0引言
现代果实采摘机器人已经开始应用智能化控制系统,对整个系统影响较大的是传感器的工作性能。受实际采摘环境的影响,传感器工作时一般都是非线性的,其测量系统的输入与输出并不能够保证完全的线性。为了解决这个问题,除了采用硬件补偿外,软件补偿方法则更加实用,因此受到了广泛的关注。基于FPGA的SOPC技术与简单的IC芯片设计不同,它可以将现有的模块资源整合为一个完整的系统,功能由FPGA芯片直接实现,微处理器的性能和外围接口电路可以由用户直接编程实现。该方法大大节省了成本,提高了计算资源的利用率,缩短了开发周期,且兼容性较好,将其应用在智能移动机器人的设计过程中,具有重要的现实意义。
1智能移动式果蔬采摘机器人总体设计
移动机器人的计算能力和移动性能非常强大,但其感知能力较弱,限制了其智能性发展;而无线网络和传感器可以为果实采摘移动式机器人提供智能的感知能力,对于复杂环境还可进行大范围的实时监测,可以完成计算和通讯任务,提高机器人路径的规划能力,实现机器人智能化自主导航,从而提高果实的采收效率和精确性。
智能移动式果蔬采摘机器人使用了主动式的结构,通过上位机发出指令,协调各个子系统完成工作,如图1所示。其中,上位机由SOPC微处理器系统代替,数据处理在DSP中完成,SOPC负责数据的融合、任务的分配和策略选择,协同各个子模块完成工作;子模块主要通过传感器、驱动电机等实现速度、方向、移动限位开关和摄像头等的控制。果蔬采摘机人总体结构如图2所示。

图1 机器人控制系统设计
图2中,机器人的执行末端安装了两个摄像头,两个摄像头被安装在机械手小臂上,摄像头作为机器人的双目,实现了机械手目标自动定位的功能;使用SOPC微处理控制系统控制机器人的移动和果实的抓取,当遇到障碍物时,微处理器可以计算障碍物的距离,从而调整移动速度和方向,成功的绕过障碍物。

图2 果蔬采摘智能移动机器人总体设计
2智能移动机器人结构和控制算法设计
对于移动式机器人的设计,控制机器人使用的传感器较多,传感器的控制可以写成函数的形式,表示为
y=f(x,t1,t2,...,tk)
(1)
其中,x可作为目标参量的待测量;t1,t2,...,tk作为k个非目标量;y为传感器输出量。由于待测目标参量和非目标参量不是非线性的,可以利用算法将其向线性函数逼近,在实际测量模型中,输入量为非目标测量数据,输出量为目标参量,利用一定的算法,通过调整模型的相关参数,降低系统的控制误差,达到设计要求。

图3 控制电路图
机器人和物体之间的距离一般采用三角测量方法来确定,利用传感器的红外管发出红外光线,当红外光碰到障碍物时会被反射回来,被反射回来后进入探测器,可以实时的测得障碍物的距离。PSD传感器的位置如图4所示。

图4 PSD传感器位置示意图
图5表示在SOPC控制下舵机的执行原理,控制电路接受信号后控制电机转动,电机通过齿轮组进行变速后输出到舵盘;电机的输出轴和反馈电位计相连接,舵盘转动的同时带的反馈电位计,反馈后决定电机的转动方向和速度,从而达到停止的目的。为了提高机器人控制的精度,利用BP神经网络算法,根据系统的运行状态,利用PID调节器,对机器人智能移动进行优化设计,其原理如图6所示。

图5 SOPC控制舵机执行原理

图6 基于BP神经网络结构的PID控制器结构
为了提高系统的控制精度,对控制对象进行离散化,并采用PID控制器对系统进行控制。PID控制器的算法可以表示为
u(k)=u(k-1)+kp[error(k)-error(k-1)]+
kierror(k)+kd[error(k)-
2error(k-1)+error(k-2)]
(2)
其中,kp、ki、kd分别为积分常数;u(k)为控制函数;error(k)为控制误差。那么,神经网络的输入层可以写成

(3)
其中,M表示控制系统的复杂度。神经网络隐含层的输入和输出可以表示为

(4)

(5)
神经网络输出层的输入和输出可表示为
重庆—中国茶叶主要发源地之一,优质茶叶盛产之地。每隔几年,重庆茶叶学会和商会都会进行十大名茶的评选,永川秀芽多次被评为重庆十大名茶之一。
(6)
输出层输出节点分别对应3个可调参数kp、ki、kd,其输出层的Sigmoid函数为
(7)
取性能指标函数为
(8)
神经网络的权系数需要利用梯度下降法来修正,在加权系数的负方向对E(k)进行搜索调整。为了加快收敛速度,加入一个全局极小惯性项,有
(9)
其中,η为学习速率,α为惯性系数。
(10)



通过以上分析,可以得到神经网络输出层的学习算法为
(l=1,2,3)
(12)
隐含层的加权系数学习算法可以表示为
(13)
g′(·)=g(x)[1-g(x)],f′(·)=[1-f2(x)]/2
(14)
在仿真中,利用的是离散化的控制对象,对障碍物的位移进行实时反馈,从而调整机器人控制系统的精度,提高机器人智能化移动的高效性。
3智能移动式果蔬采摘机器人性能测试
为了验证本次研究设计的智能移动机器人的可靠性,对采摘机器人的移动性能进行了测试,包括机器人移动速度控制、躲避障碍物控制和移动误差。测试场景如图7所示。
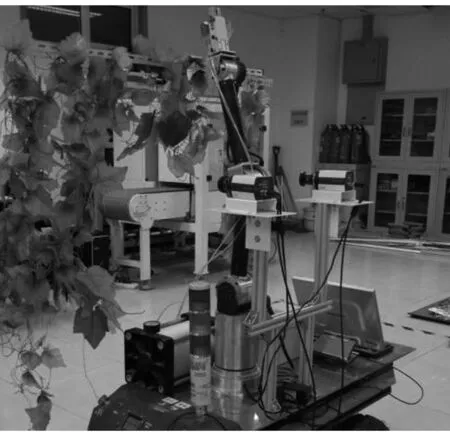
图7 果蔬采摘机器人测试场景
在果蔬采摘机器人的移动过程中,设置了障碍物,对机器人的输入量和目标量进行设定后,对3层BP神经网络进行训练。其中,输入层、隐含层和输出层的神经网络节点分别为18、28、16个,每个设计元节点用传感器代替。通过计算,得到了采摘机器人移动速度随时间变化曲线,如图8所示。
由图8可看出:当遇到障碍物时,机器人首先降低行驶速度,当速度降低到接近零时开始调整方向,然后再加速通过,其速度的控制比较精确和稳定。
本文共采集了80个样本对数据作为神经网络的输入,通过不断的训练,得了如图9所示的移动路径结果。由图9可以看出:机器人可以成功地躲避障碍物,最终到达终点。在不使用神经网络算法时,使用微处理器对误差进行统计,通过计算得到了如图10所示的收敛残差。

图8 采摘机器人移动速度随时间变化曲线

图9 采摘机器人移动路径结果图

图10 非神经网络残差控制收敛曲线
由图10可以看出:在计算到2000ms时,计算误差接近于0,计算迭代时间较长,残差不易收敛。
图11为机器人在躲避障碍物、使用神经网络算法进行样本训练时得到的位移残差曲线。由图11可以看出:在计算到600ms时,计算误差便开始接近于0,计算迭代时间较短,残差易收敛,从而验证了本文算法的可靠性。

图11 神经网络残差控制收敛曲线
4结论
1)为了提高果实采摘机器人的自主导航能力,提高智能化移动的速度和精度,提升果实采摘机器人的自主感知能力,利用SOPC微处理系统技术,结合神经网络PID控制算法,设计了一款新的智能移动机器人,从而大大增强了果实采摘机器人输入和输出的线性关系,使其可以在单片芯片上实现复杂的系统控制,降低了开发成本。
2)对智能移动果蔬采摘机器人的性能进行了测试,结果表明:采摘机器人可以根据障碍物自主的调整移动速度,实现其智能化移动控制;可以有效地绕过障碍物,实现自主导航性;使用神经网络算法可以有效地提高移动的精度,为高精度果蔬采摘机器人的设计提供了技术参考。
参考文献:
[1]陈磊,陈帝伊,马孝义.果蔬采摘机器人的研究[J].农机化研究,2011,33(1):224-231.
[2]梁喜凤,杨犇,王永维.番茄收获机械手轨迹跟踪模糊控制仿真与试验[J].农业工程学报,2013,29(17): 16-22.
[3]张建锋,何东健,张志勇.采摘机器人自适应鲁棒跟踪控制算法设计[J].农机化研究,2009,31(12):10-14.
[4]吴忠强,张晓霞,舒杰.柔性机器人基于自适应模糊动态面的实用稳定控制[J].中国机械工程,2012,23(19): 2297-2301.
[5]过希文,王群京,李国丽.基于动态面的机械臂轨迹跟踪神经网络自适应算法[J].系统仿真学报,2011,23(11):2327-2332.
[6]李晓刚,刘晋浩.基于反演设计的码垛机器人神经网络自适应控制[J].包装工程,2012,33(1):80-85.
[7]丁锐,喻俊志,杨清海,等.基于红外传感器的两栖机器人智能避障控制[J].南京理工大学学报:自然科学版,2009,33(S1):92-97.
[8]丁吉,段锁林,任富强,等.基于模糊规划器的轮式移动机器人避障研究[J].常州大学学报:自然科学版,2010,22(4):34-38.
[9]李菊叶.小型机器人避障的设计与实现[J].北华大学学报:自然科学版,2012,13(2):245-248.
[10]常健,吴成东,李斌.移动机器人避障方法综述[J].仪器仪表学报,2010,31(8):439-442.
[11]任亚楠,贾瑞清,何金田,等.基于超声波传感器的移动机器人避障系统研究[J].中国测试,2012,38(3):76-79.
[12]王丙强,宋弘.两级BP网络在机器人传感器融合中的应用[J].微计算机信息,2009,25(23):192-194.
[13]李继勇,赵德彪,张静.基于BP神经网络的供应链风险预警研究[J].河北工程大学学报:自然科学版,2011,28(3):83-77.
[14]周芳,朱齐丹,赵国良.基于改进快速搜索随机树法的机械手路径优化[J].机械工程学报,2011(11):30-35.
[15]Goh Shy ChyanS.G.Ponnambalam.Obstacle avoidance control of redundant robots using variants of particles warm optimization[J].Robotics and Computer Integrated Manufacturing,2011,25(8):282-285.
[16]梁喜凤,王永维,苗香雯.番茄收获机械手避障运动规划[J].农业机械学报,2008,39(11):89-93.
[17]宋勇,李贻斌,栗春,等.基于神经网络的移动机器人路径规划方法[J].系统工程与电子技术,2008(2):316-319.
[18]张美玉,黄翰,郝志峰,等.基于蚁群算法的机器人路径规划[J].计算机工程与应用,2005(25):34-37.
[19]孔令军,张兴华,陈建国.基本蚁群算法及其改进[J].北华大学学报:自然科学版,2004(6):572-574.
[20]罗德林,吴顺祥.基于势场蚁群算法的机器人路径规划[J].系统工程与电子技术,2010(6):1277-1280.
[21]许斯军,曹奇英.基于可视图的移动机器人路径规划[J].计算机应用与软件,2011(3):220-222.
[22]尹建军,武传宇,Yang Simon X,等.番茄采摘机器人机械臂避障路径规划[J].农业机械学报,2012(12):171-175.
[23]姬伟,程风仪,赵德安,等.基于改进人工势场的苹果采摘机器人机械手避障方法[J].农业机械学报,2013(11):253-259.
Design of Intelligent Mobile Fruit Picking Robot——Based on Neural Network Algorithm and SOPC Technology
Deng Rong
(Chongqing Vocational Institute of Engineering, Chongqing 402260,China)
Abstract:Fruit and vegetable picking robots generally use the mobile robot, which has a powerful computing capacity and mobility. However,the limitations of their sensing ability limits the development of the intelligent. In order to improve fruit picking robot intelligent mobile performance, it has better achieve autonomous navigation capabilities by SOPC of a new intelligent mobile robot control system, and it optimized neural network algorithm, greatly improved the accuracy of mobile robot, enhanced the linear relationship between the input and output, made control system on a single chip realize all the functions of the complex system. Through the test, it is found that the speed of the robot's movement is better and the moving error is lower, and the intelligent movement of the fruit and vegetable picking is realized.
Key words:fruit picking robot; intelligent mobile; autonomous navigation; SPOC technology
中图分类号:S225.91;TP242
文献标识码:A
文章编号:1003-188X(2016)08-0184-05
作者简介:邓荣(1977-),女,重庆人,副教授,硕士,(E-mail)dengrong1977@126.com。
基金项目:重庆市教委科学技术研究项目(KJ1403209);重庆市社会科学规划博士项目(2014BS117)
收稿日期:2015-07-28
