
樱桃采摘机器人设计——基于PLC高速并联自动化控制
2016-03-23 04:25郭素娜汪小志
农机化研究 2016年8期
张 丽,郭素娜,汪小志
(1.河南工业职业技术学院,河南 南阳 473000; 2.南昌工学院,南昌 330108;3.南昌大学,南昌 330031 )
樱桃采摘机器人设计——基于PLC高速并联自动化控制
张丽1,郭素娜1,汪小志2,3
(1.河南工业职业技术学院,河南 南阳473000; 2.南昌工学院,南昌330108;3.南昌大学,南昌330031 )
摘要:为了降低樱桃采摘机器人采摘过程中的樱桃破碎率,提高机器人的工作效率,设计了一款新的基于模糊控制和高速并联自动化控制的机器人。该机器可以利用PC上位机对樱桃图像进行采集,并可以对图像进行二值化、膨胀腐蚀处理,从而成功地识别成熟樱桃;同时,可以使用模糊PLC控制方法对采摘机器人的响应角度误差进行控制。为了验证机器人的性能,使用樱桃采摘试验的方法对樱桃采摘机器人的性能进行了测试。结果表明:高速并联自动化控制的樱桃采摘机器人总体采摘时间有了明显的缩短,工作效率有所提高;通过模糊控制可以使采摘机器人角度的响应平稳地达到指定角度,且没有出现大的超调量,有利于樱桃的采摘,降低了破碎率。
关键词:樱桃采摘;机器人;超调量;PLC控制;高速并联
0引言
樱桃果实容易破碎,目前樱桃收获主要是靠人工小心完成的。但是,樱桃的采摘期比较短,采摘工作必须在短时间内完成,否则会造成果实过熟而导致腐烂等。由于劳动力的短缺,加上劳动强度较大,樱桃的种植规模受到了限制;并且樱桃树一般较高,采摘过程需要借助于梯子等,增加了作业的危险性。因此,为了节约劳动力、降低樱桃采摘的破碎率,需要设计一款具有高识别能力、高控制精度及高作业效率的机器人。本次研究结合图像处理技术和模糊控制技术对樱桃采摘机器人进行了设计,以期得到一款新的樱桃采摘机器人。
1 樱桃收获机器人总体设计
樱桃收获机器人总体是由4个自由度的机器人、三维视觉传感器、主控制电脑和移动装置组成。机器人高2.2m、宽1.2m、长0.8m,视觉摄像头被安装在机器人上,可以完成成熟樱桃图像的采集。
樱桃采摘机器人的总体设计如图1所示,主要使用了图像识别技术和模糊控制技术。利用图像识别技术可以成功地识别樱桃的成熟度,使用模糊控制可以平稳地输出樱桃的采摘角度。机器人机械手主要由3部分组成,包括控制系统、驱动系统和手部执行末端,如图2所示。

图1 樱桃采摘机器人总体设计框图

图2 机械手结构图
机械手的设计方式很多,如夹持型、托持型和吸附型等,本文采用托持型。机械手的移动和旋转动作都是由驱动系统来完成的,驱动系统还可以为手部执行末端提供一个剪断力,通过剪断樱桃的梗,实现樱桃的采摘作业。
图3为本文设计的PLC控制的硬件结构图。其中,各部分通过总线(电源总线、控制总线、地址总线、数据总线)连接而成;硬件结构主要包括各种数据接口和微处理器,微处理器主要负责图像的处理加工。

图3 PLC硬件结构图
2机器人PLC控制和高速并联设计
图像识别技术是机器人自动化控制的基础,樱桃采摘机器人的关键设计部分包括图像识别模块,图像识别主要是基于图像分割技术的。令集合R代表的整个图像区域,对R的图像分割可以看作是将R分成N个满足以下条件的非空子集R1,R2,…,RN,则

2)对于所有的i和j,i≠j,有Ri∩Rj=∅;
3)对于i=1,2,…,N,有P(Ri)=TRUE;
4)对于i≠j,有P(Ri∪Rj)=FALSE;
5)对于i=1,2,…,N,Ri是连通的区域。

通过图像识别,将角度的输入的误差(e)和误差微分(ec)分别设置为7个模糊集,模糊子集为e,ec={NB,NM,NS,ZO,PS,PM,PB}。将输出的ΔKP、ΔKD、ΔKI也分别设置为7个模糊集,模糊子集为ΔKP、ΔKD、ΔKI={NB,NM,NS,ZO,PS,PM,PB}。
应用模糊合成推理PID参数的整定算法,第k个采样时间的整定为
KP(k)=KP0+ΔKP(k)
KI(k)=KI0+ΔKI(k)
KD(k)=KD0+ΔKD(k)
(1)
其中,KP0、KI0、KD0为经典PID控制器的初始参数,设计时可以借助MatLab的SIMULINK工具箱对参数进行仿真模拟和优化设计。仿真模拟框图如图4所示。

图4 五输入PID控制器
在此确定模糊化因子为ke=kec=0.01,解模糊因子为K1=0.5、K2=K3=0.01。系统的逻辑运算过程如图5所示。
控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID参数在线自动校正,工作流程如图6所示。

图5 模糊控制系统逻辑运算过程

图6 樱桃采摘机械手PLC高速并联设计
以PLC CPU+运动控制单元为核心,搭建机械手定增益PID 单轴误差反馈运动控制和整机控制系统,可通过反馈调节的方式,实现PID误差模糊控制过程,从而高质量、高速率地完成樱桃采摘作业。
3樱桃采摘机器人性能测试
为了测试设计的樱桃采摘机器人的性能,通过樱桃的采摘试验,对机器人的樱桃识别过程、自动化PLC采摘系统响应及并联控制的工作效率进行测试,首先对测试系统对樱桃的识别。
图7为通过机器人的机器视觉采集得到的成熟樱桃图像示意图。樱桃采摘机器人的自动化实现过程需要完成对图像的处理,由于彩色图像是无法将完整的图像信号传输给PLC控制的,因此需要将图像转换成二值图,从而将图像信号有效的转换为电信号。二值图的转换效果如图8所示。

图7 成熟樱桃采集图像

图8 樱桃二值化图
为了使图像信号更加明显,需要对樱桃的二值化图像进一步处理。通过膨胀腐蚀功能,得到了如图9所示的结果。

图9 樱桃图像膨胀腐蚀效果图
由图9可以看出:利用膨胀腐蚀效果可使成熟樱桃图像轮廓更加明显,从而得到较好的图像信号。
图10为通过对机器人进行测试得的角度相应曲线。由图10可以看出:在没有加模糊控制时,系统具有较大的超调量,且系统不稳定,最后没有平稳地输出机器人的角度。为了使系统能够较稳定的输出角度量,需要使用模糊控制方法。
图11为通过模糊控制得到的角度响应曲线。由图11可以看出:通过模糊控制可以使角度的响应平稳地达到指定角度,且没有出现大的超调量,控制效果非常平稳,有利于樱桃的采摘,降低了破碎率。
为了对比本文设计机器人的高效率,对传统机器人和本文设计机器人的樱桃采摘破碎率进行了统计,最后对机器人的6次采摘结果进行统计,得到了表1所示的破碎率测试表。由表1可以看出:本文设计的机器人,樱桃采摘破碎率有了明显的降低,采摘效果较好。

图10 角度响应曲线
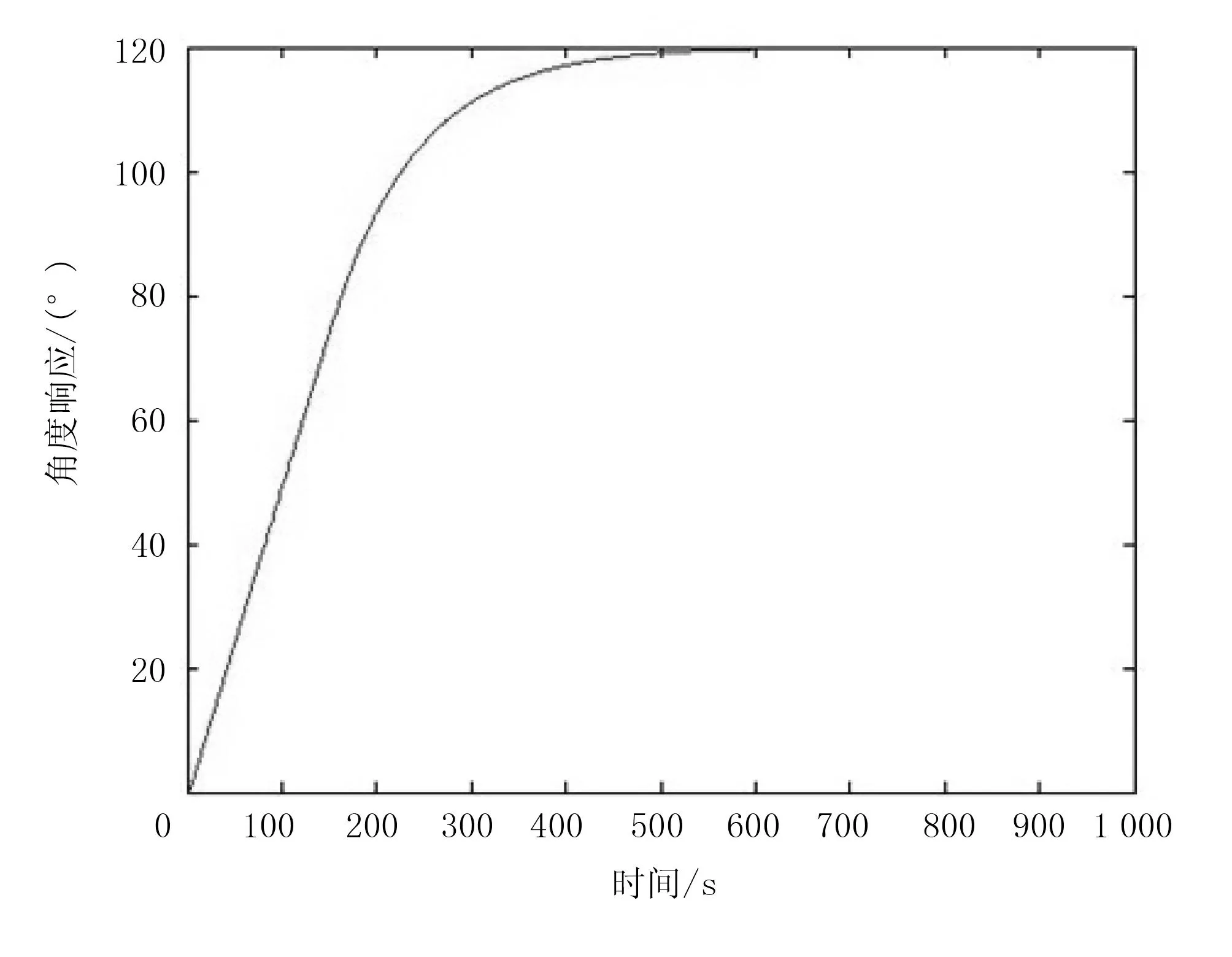
图11 模糊控制角度响应曲线
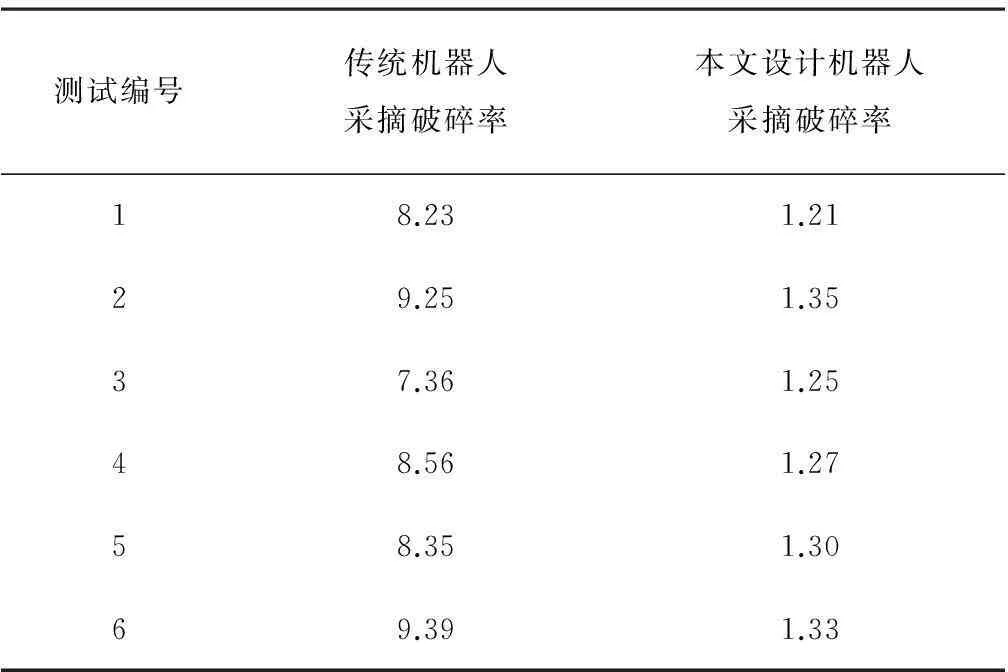
测试编号传统机器人采摘破碎率本文设计机器人采摘破碎率18.231.2129.251.3537.361.2548.561.2758.351.3069.391.33
图12为使用传统机器人和本文设计机器人对采摘时间进行对比测试。由测试结果可以看出:使用本文设计机器人可以有效地降低一次采摘作业的时间,提高了采摘的作业效率。
4结论
设计了一款新的樱桃采摘机器人,且将图像二值化、膨胀腐蚀应用到了机器人机器视觉系统中;在控制系统中采用了PLC闭环反馈控制,提高了作业的精度;设计出了高速并联协同作业的机械手,提高了作业的效率。
对机器人的性能进行了测试,通过测试结果可以看出:与传统机器人相比,本文设计的机器人可以有效地完成图像的处理过程,从而完成了成熟樱桃的识别,降低了误采率;控制过程比较平稳,控制精度较高,降低了采摘破碎率;采摘时间有了明显的缩短,提高了工作效率。
参考文献:
[1]段瑞玲,李庆祥,李玉和.图像边缘检测方法研究综述[J].光学技术,2005(3):415-419.
[2]魏伟波,芮筱亭.图像边缘检测方法研究[J].计算机工程与应用,2006(30):88-91.
[3]宏福.图像边缘分割算法的优化研究与仿真[J].计算机仿真,2011(8):280-283.
[4]袁春兰,熊宗龙.基于Sobel算子的图像边缘检测研究[J].河海科技大学学报,2009,30(6):31-48.
[5]韦艳,陈华根.GPS定位显示中的坐标转换[J].海洋测绘,2010,30(3):16-19.
[6]郝冬,刘斌.基于模糊逻辑行为融合路径规划方法[J].计算机工程设计,2009,30(3):660-663.
[7]王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
[8]王俭,赵鹤鸣,陈卫东.基于子区域的机器人全覆盖路径规划的环境建模[J].苏州科技学院学报:工程技术版,2004,17(1):72-75.
[9]冯秀军,杨立东.2BDY-8型2垄密型高速气吹式精密播种机简析[J].农业机械,2007(8):85-86.
[10]王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
[11]郝冬,刘斌.基于模糊逻辑行为融合路径规划方法[J].计算机工程设计,2009,30(3):660-663.
[12]孟庆山.水源热泵机组变流量水系统节能优化探讨[J].制冷与空调,2010,10(1):84-89.
[13]谢志勇,张铁中,赵金英.基于 Hough 变换的成熟草莓识别技术[J].农业机械学报,2007,38(3): 106-109.
[14]王东,赵宇,王秀红.一种改进的DFT迭代的MIMO-OFDM系统信道估计算法[J].应用科技,2009,3(3):19-22.
[15]徐文颖,张静,董建萍.导频信道估计中的插值算法[J].上海师范大学学报,2007,12(6):41-46.
[16]陈晖,陈晓光.基于直接判决导频跟踪的OFDM系统快时变信道估计[J].通信学报,2006,9(27):1-5.
[17]李文见,姬江涛.轮履复合式农业机器人越避障控制研究[J].河南科技大学学报:自然科学版,2007(8):57-59.
[18]王仲民,戈新良,唐智强.多传感器信息融合技术研究现状和发展趋势[J].河北工业大学学报,2003,32(2): 30-35.
[19]国刚, 王毅.应用BP神经网络进行手写体字母数字识别[J].人工智能及识别技术,2008,4(6):1459-1460.
[20]施少敏,马彦恒,陈建泗.基于BP神经网络的数字识别方法[J].兵工自动化,2006,25(10): 40-41.
Design of Cherry Picking Robot——Based on PLC High-speed Parallel Automatic Control
Zhang Li1, Guo Suna1, Wang Xiaozhi2,3
(1.Henan Polytechnic Institute, Nanyang 473000, China; 2.Nanchang Institute of Science & Technology, Nanchang 330108,China; 3.Nanchang University,Nanchang 330031,China)
Abstract:In order to decrease the broken rate of picking robot in the process of picking cherry, and enhances the working efficiency of the robot, a new robot based on fuzzy control and high speed parallel automation control has been designed. The machine can use PC for cherry image acquisition, and can be conducted for image binarization, expansion corrosion process, thus successful identification of ripe cherry, you can use the fuzzy PLC control method, response to control the Angle error of picking robot. In order to verify the performance of the robot, the use of cherry picking experimental method for cherry picking robot performance was tested. Through test, found that high speed parallel automatic control overall pick cherry time was shortened obviously, improve the work efficiency of the robot, through fuzzy control can make the point of view of picking robot response smoothly to achieve the specified Angle, and there are no big overshoot, which is good for cherry picking, reduce the breakage rate.
Key words:cherry pick; robot; overshoot amount; PLC control; high-speed parallel
中图分类号:S225.93;TP242;TP273
文献标识码:A
文章编号:1003-188X(2016)084-0199-05
作者简介:张丽(1979-),女,河南南阳人,讲师,硕士。通讯作者:汪小志(1981-),女,武汉人,讲师,博士研究生,(E-mail)wangxiaozhi@ncu.edu.cn。
基金项目:湖北省自然科学基金项目(2014CFB322)
收稿日期:2015-05-27
猜你喜欢
金桥(2019年10期)2019-08-13
建筑建材装饰(2016年11期)2016-12-29
科技创新与应用(2016年34期)2016-12-23
科学与财富(2016年18期)2016-12-22
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年14期)2016-06-08
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
