
基于模糊控制的拖拉机路径跟踪仿真研究
2016-03-23 04:25张长龙
农机化研究 2016年8期
石 翔,马 蓉,张长龙,梁 锦
(石河子大学,新疆 石河子 832003)
基于模糊控制的拖拉机路径跟踪仿真研究
石翔,马蓉,张长龙,梁锦
(石河子大学,新疆 石河子832003)
摘要:结合拖拉机实际工作性能与环境,建立了一种基于模糊控制的拖拉机路径跟踪仿真系统,分别对简化二轮模型、模糊控制模型、纯追踪模型及转向操纵控制模型等4个部分进行了阐述。此外,将模糊控制与纯追踪模型结合,分别对相同横向偏差下、不同航向偏差下前轮转角响应情况和相同航向偏差下、不同横向偏差下前轮转角响应情况进行了Matlab/Simulink仿真。仿真结果表明:该仿真系统可靠,具有一定的参考价值。
关键词:拖拉机;路径跟踪;模糊控制;纯追踪模型
0引言
现代农业生产正向现代化、信息化、精准化发展,而拖拉机作为主要动力机械,为了更好地完成作业,自主导航是必不可少的。国内许多学者对自主导航进行大量研究[1],但是缺乏对拖拉机路径跟踪必要的仿真研究。张智刚[2]以水田插秧机为实验平台,部分提到了其仿真系统,主要包含二轮车模型、纯追踪模型、转向操纵控制模型和必要的输出环节4个部分,采用EITAE优化前视距离提供仿真数据。贾全[3]大致描述了仿真模型,通过调节前视距离达到最优跟踪效果,但缺乏细致描述与仿真结果分析。此外,单一的前视距离并不能满足多变而复杂的农田作业环境。
本文从路径跟踪技术入手,结合国内外发展状况,详细论述拖拉机路径跟踪仿真系统的各个部分,完善模块功能。此外,选择纯追踪模型与模糊控制相结合方法,目的在于提高拖拉机作业环境适应能力与跟踪精度。
1系统总体设计
本文设计的仿真系统包括二轮车模型、模糊控制模型、纯追踪模型及转向操纵控制模型等4个部分。路径跟踪系统控制框图如图1所示。
简化二轮车模型用于模拟拖拉机运动学规律,主要用于航向偏差和横向偏差解算;模糊控制模型根据输入的横向偏差和航向偏差,为纯追踪模型提供前视距离;纯追踪模型实现直线路径跟踪条件下期望转向轮偏角的决策;转向操纵控制模型是对拖拉机转向系统的描述, 模型输入是期望转向轮偏角, 输出是实际转向轮偏角。

图1 控制框图
2仿真系统搭建
2.1 二轮车模型
拖拉机采用应用广泛的车辆二轮模型,假定车速不变,行驶地面平整,不计车辆的侧滑和离心力,可将拖拉机看出一阶惯性环节,其运动学模型为[4]
(1)

2.2 模糊控制模型
模糊控制不依赖精确的数学模型,适宜解决非精确数学模型的复杂控制系统的控制问题。通过对横向偏差与横向偏差模糊化,根据编写的模糊规则,计算得出前视距离。
利用MatLab提供基于模糊逻辑的系统设计工具,通过良好的图形界面,完成模糊推理系统编辑器、隶属函数编辑器及模糊规则编辑器等工作。其中,通过对模糊规则观察器调试,查看规则运作情况与各隶属函数形状对结果的影响,进行调整规则、参数大小等,使模糊控制器效果更好,模糊曲面光滑[5-6]。
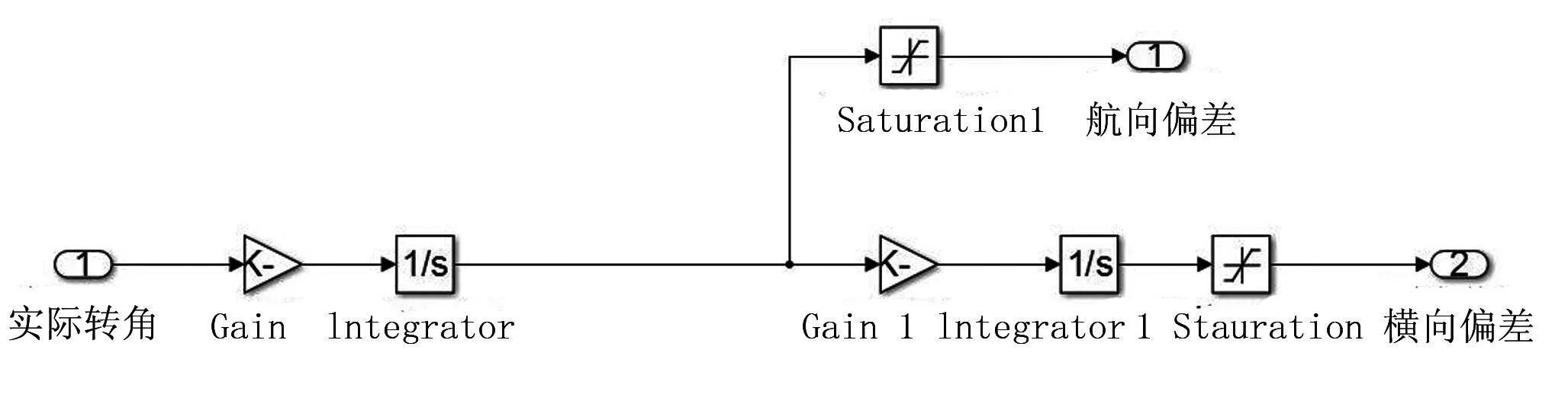
图2 二轮车运动学仿真模型
2.3 纯追踪模型
纯追踪模型方法易于理解,方便掌握,可操作性强,仅需调节前视距离参数,同时前视距离的选择也直接影响路径跟踪精度。

图3 纯追踪模型几何解析图
图3中的车体坐标系O′X′Y′中,点P(x′,y′)为路径上的目标点;E为前视距离;R则是该弧段的半径。x′、L′与R的几何关系式为
D+x′=R
(2)
D2+y′2=R2
(3)
x′2+y′2=E2
(4)
由式(2)~式(4)得出
(5)
其中,x′为横坐标。在直线跟踪情况下x′的计算公式[7]为

(6)
其中,pe为为横向偏差,ψe为航向偏差。
根据简化的二轮模型[8],可得出车体转向轮偏角和转弯半径之间关系为
δ=arctan(L/R)
(7)
其中,δ为转向轮偏角,L为车体轴距。
由式(5) ~ 式(7)可得到直线跟踪条件下纯追踪模型计算的转向轮偏角控制量为
(8)
其中,ψe、pe可由数学解算出,只有前视距离E未确定。根据式(8),纯追踪模型搭建如图4所示。
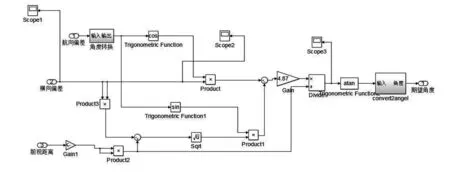
图4 纯追踪模型结构图
2.4 转向操纵控制模型
转向操纵模型作为拖拉机作业的重要执行端,通过对拖拉机转向系统的特性进行分析,其传递函数可表示为
(9)
其中,Y(s)为期望前轮转角的拉氏变换;F(s)为实际前轮转角的拉氏变换。利用实验记录实际前轮转角和期望前轮转角,通过MatLab整定计算,可求得τ≈0.2。此外,由于转向系统选择的是步进电动机驱动,步进电机定位较为精确,且易于操纵。在不考虑步进电机力矩不足条件下,可视为步进电机的控制实际上是开关控制,构成闭环控制时,电机的转向取决于偏差的极性。该过程类似于继电器特性,为使仿真贴合实际,人为加入限定偏差允许范围,此时步进电机的运行方式具有带死区的继电器特征。步进电机驱动下的转向闭环结构框图可以表达为图5的形式。
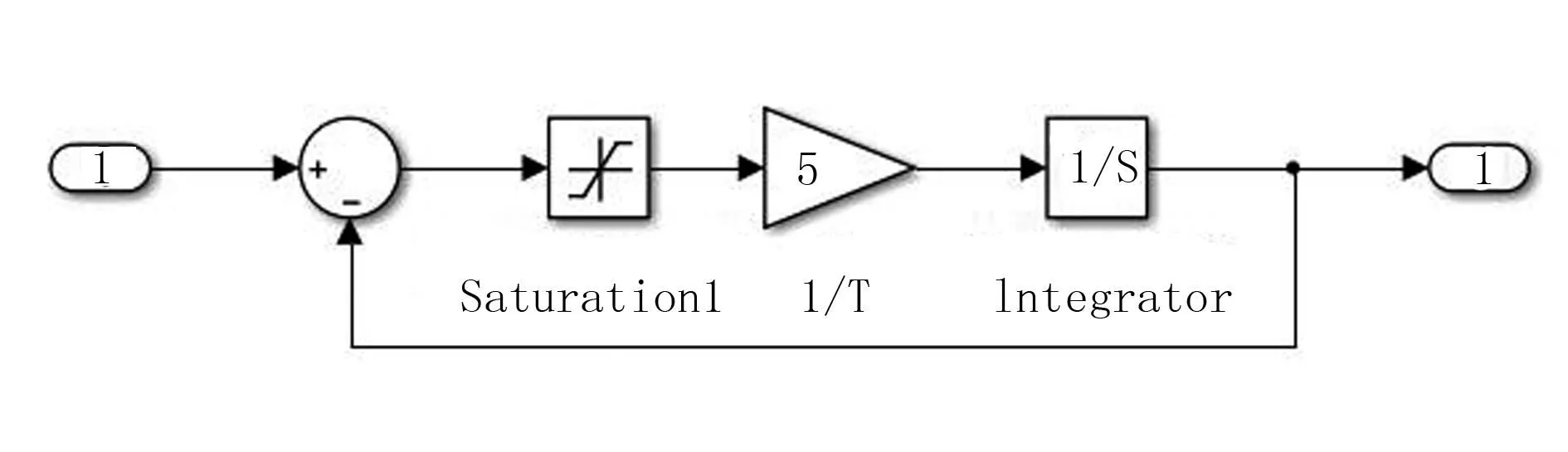
图5 转向系统闭环控制结构图
3系统模糊控制方法
3.1 输入输出变量的模糊化
分别对横向偏差、航向偏差、前视距离模糊化。其中,前视距离的选择将直接影响路径跟踪效果。
1)横向偏差pe。基本论域:[-60,60](cm);量化等级:{ -6,- 5,-4,-3,-2,-1,0,1,2,3,4,5,6} ;量化因子Ky=6 /60 = 1/15。
2)航向偏差Ψe。基本论域: [-90,90](°); 量化等级: { -6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6} ; 量化因子Ky=6 /90 = 1/15。
3)前视距离E。基本论域:[0,600 ](cm);量化等级: { -6,- 5,-4,-3,-2,-1,0,1,2,3,4,5,6} ; 量化因子Ky=6×2 /600 = 0.02。
横向偏差y、航向偏差Ψ和前视距离E这3个变量的模糊等级均为: 负大( NB) 、负中( NM) 、负小( NS) 、零( ZO) 、正小( PS) 、正中( PM) 、正大( PB) 。
3.2 模糊控制规则表设计
模糊控制规则表设计原则为:横向偏差作为首要关注对象,应尽快地减少横向偏差,使拖拉机追踪目标路径;当横向偏差持续减少时,应增加系统的稳定性,体现在拖拉机转向波动较小,直到完全追踪直线路径。
在设计控制规则之前,规定横向位置偏差、航向偏差和前轮转角的正负号如下:导航车位于导航线右侧时横向位置偏差为正,左侧为负;航向偏差顺时针为正,逆时针为负;转向轮右转为正,左转为负。如图6所示,C为跟踪路径,车体在导航线左侧,则横向偏差为负,航向偏差为负,前轮应顺时针转动,为正。

图6 车体与路径位置关系
根据驾驶员的操作经验,将拖拉机路径跟踪过程及作业环境中遇到的各种可能出现情况及相应的控制策略可用49条模糊语句来描述。限于篇幅,不一一列举。这些条件语句构成路径跟踪控制模糊控制模型,路径模糊控制规则如表1所示,模糊控制曲面如图7所示。
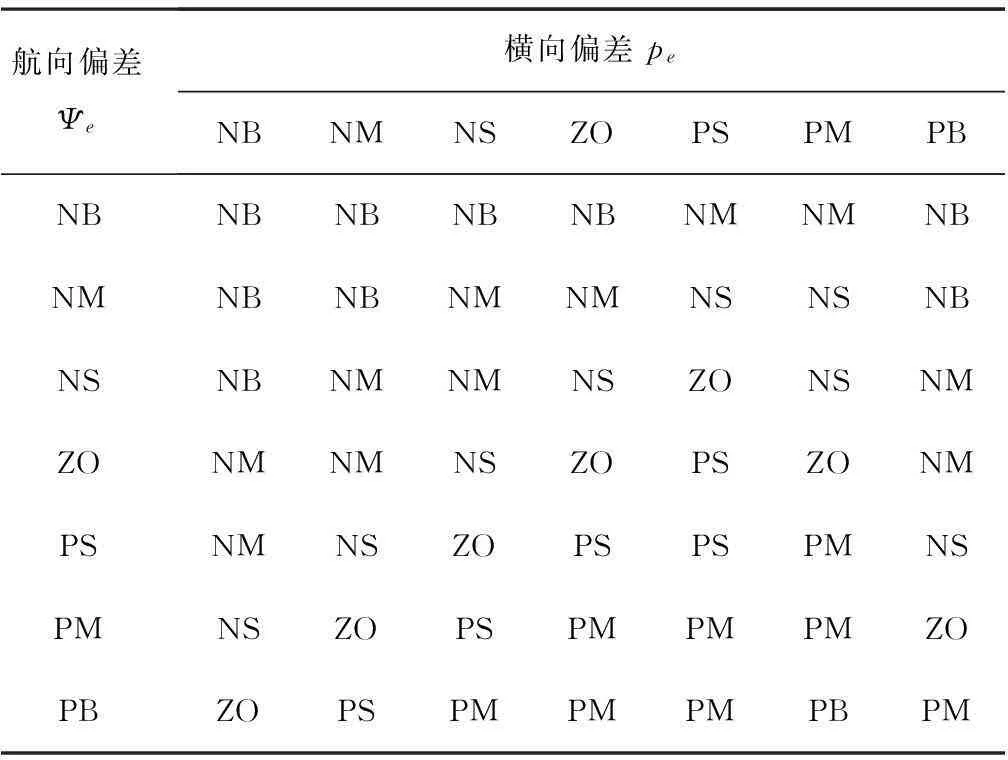
表1 模糊控制规则表

图7 模糊控制曲面
4系统模拟仿真结果分析
综上所述,将二轮车简化二轮车模型、模糊控制模型、纯追踪模型、转向操纵控制模型和必要的输出环节在MatLab/Simulink中搭建,如图8所示。
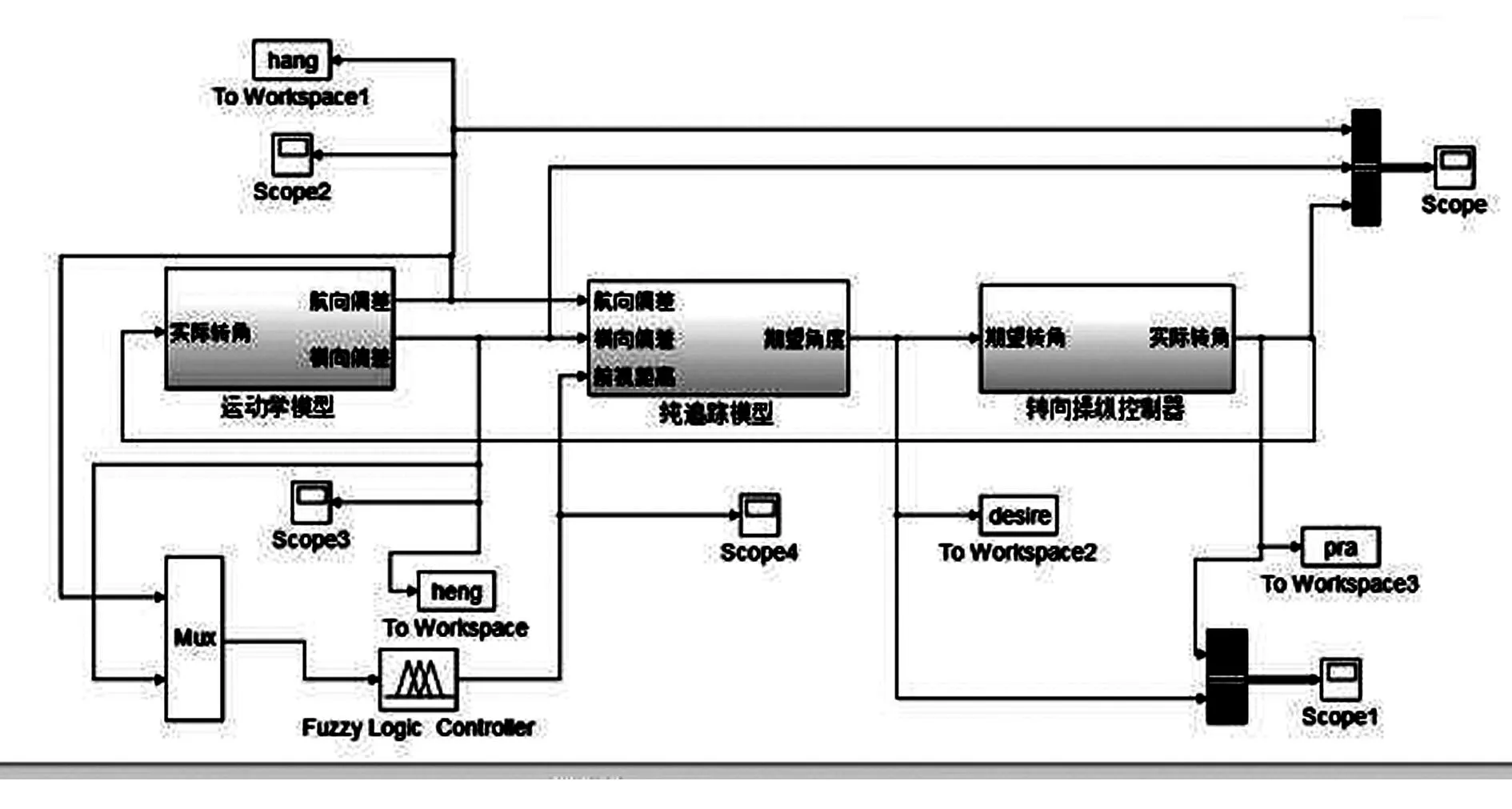
图8 导航系统simulink模型图
在仿真过程中,速度V的取值范围为[0,1]m/s,轴距为2.435m,该参数来自实验室TN654拖拉机。在车速V=1m/s,横向偏差为0.4m,航向偏差分别取20°、40°、60°,前轮初始转角为0°的前提条件下,对路径跟踪模型进行仿真,结果如图9所示。此外,在航向偏差为40°,横向偏差分别为0.2、0.4、0.6m条件下(初始转角为0°的),对路径跟踪模型仿真,结果为图10所示。

图9 前轮转角变化曲线(pe=0.4m)

图10 前轮转角变化曲线(Ψe =40°)
通过仿真数据对比可知:在横向偏差一定、不同航向偏角条件下,前轮转角响应明显,且随着航向偏差增加,系统响应速度加快,有效抑制偏差增加;而在航向偏差一定、不同横向偏差条件下,各个前轮转角相差并不大。这是由于拖拉机作业时车速视为恒速,前轮转角不宜大幅度波动,前轮转角在稳定的条件下,不断小幅度调整向期望路径靠近,直到完全跟踪路径。
前视距离统计表如表2所示。由表2数据对比可知:在横向偏差一定及不同航向偏差条件下,前视距离变化不大,呈现递减趋势。由于航向偏差为次要衡量指标,故前视距离变化不大。而在特定航向偏差及不同横向偏差条件下,前视距离变化较为明显,符合驾驶员的操作经验,即横向偏差大小将决定前视距离的远近。综上所述可知:仿真结果符合拖拉机路径跟踪控制思想,前视距离的变化趋势符合模糊控制规则的设定。

表2 前视距离统计表

项目Ψe=40°横向偏差0.2m横向偏差0.4m横向偏差0.6m前视距离/m3.803.242.65
5结论
1)本文完成了对拖拉机路径跟踪仿真系统的搭建。将各个部分详细阐述并在MatLab/Simulink中完整搭建,部分环节加入继电特性,从而更加贴近实际生产。此外,通过加入必要的输出环节,有利于后期数据分析。
2)模糊控制的加入既考虑了前轮转角的响应速度,抑制航向偏差加大,又考虑了在路径跟踪时的稳定性,避免奇异值出现,非单一的前视距离将大大提高路径跟踪能力。该路径跟踪仿真系统在一定程度上反应了拖拉机在实际生产作业中的性能与需求,将为后期实验提供参考意义。
参考文献:
[1]姬长英,周俊.农业机械导航技术发展分析[J].农业机械学报,2014,45(9):44-54.
[2]张智刚,罗锡文,赵祚喜,等.基于 Kalman 滤波和纯追踪模型的农业机械导航控[J].农业机械学报,2009,40(S):6-12.
[3]贾全.拖拉机自动导航系统关键技术研究[D].北京:中国农业机械化科学研究院,2013.
[4]周建军,张漫,汪懋华,等.基于模糊控制的农用车辆路线跟踪[J].农业机械学报,2009,40(4):151-156.
[5]张国良,曾静,柯熙政,等.模糊控制及其MATLAB应用[M].西安:西安交通大学出版社,2002.
[6]王江,付文利.基于MATLAB/Simulink系统仿真权威指南[M].北京:机械工业出版社,2013.
[7]Anibal Ollero ,Guillermo Heredia. Stability analysis of mobile robot path tracking[C] //Proceedings of the IEEE/ RSJ International Conference on Intelligent Robots and Systems.Pittsburgh:PA, 1995,3:461-466.
[8]黄沛琛. 基于纯追踪模型的插秧机地头转向控制方法[D].广州: 华南农业大学, 2009.
Simulation Study on Tractors Path Tracking Baesd on Fuzzy Control
Shi Xiang, Ma Rong, Zhang Changlong, Liang Jin
(College of Mechanical and Electrical Engineering,Shihezi University,Shihezi 832000,china)
Abstract:Combined with environmental effects and performance,simulation model of tractors path tracking based on fuzzy control is established. The model includes kinematics simulation model of two-wheel vehicle,fuzzy control model,pure pursuit model and a model of steering system. In addition, by combining the fuzzy controller with the pure pursuit model,this paper simulates the response curves of the same lateral error with different heading errors and the same heading error with different lateral errors respectively,which used Matlab//Simulink. By the model built in Matlab / Simulink,results of simulation indicate the model is reliable and valuable.
Key words:tractor; pathtracking; fuzzy control; pure tracing model;
中图分类号:S219;S391.9
文献标识码:A
文章编号:1003-188X(2016)08-0237-05
作者简介:石翔(1991-),男,新疆石河子人,硕士研究生,(E-mail)xangzi@foxmail.com。通讯作者:马蓉(1974-),女,新疆石河子人,教授,硕士生导师,(E-mail)lzymrhs@163.com。
基金项目:国家高技术研究发展计划项目(2013AA102307)
收稿日期:2015-07-13
猜你喜欢
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
创新作文(小学版)(2019年4期)2019-07-24
小学生必读(低年级版)(2019年3期)2019-07-08
儿童故事画报(2018年4期)2018-05-21
儿童时代·幸福宝宝(2017年7期)2017-10-13
小学生导刊(2017年15期)2017-05-17
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
