
拖拉机半主动座椅悬架建模及控制研究
2016-03-23 02:24徐锐良李三妞郭志军刘美洲罗跃辉
农机化研究 2016年1期
徐锐良,李三妞,郭志军,刘美洲,倪 倩,罗跃辉
(1.河南科技大学 车辆与交通工程学院,河南 洛阳 471003;2.中国一拖集团有限公司 第三装配厂,河南 洛阳 471004)
拖拉机半主动座椅悬架建模及控制研究
徐锐良1,李三妞1,郭志军1,刘美洲1,倪倩1,罗跃辉2
(1.河南科技大学 车辆与交通工程学院,河南 洛阳471003;2.中国一拖集团有限公司 第三装配厂,河南 洛阳471004)
摘要:为了改善拖拉机的乘坐舒适性,提出了将磁流变阻尼器应用于座椅悬架的新设计思路。为此,利用地面输入模型、磁流变阻尼器模型和传统被动座椅悬架模型建立了新型的半主动座椅悬架模型,并设计了PID控制器和模糊控制器,在MatLab/Simulink仿真环境下对半主动座椅悬架与被动座椅悬架进行仿真。仿真结果表明:半主动座椅悬架相比于传统的被动座椅悬架,在减振方面效果明显;而在两种控制方法中,模糊控制效果最佳。
关键词:座椅悬架;磁流变阻尼器;控制;仿真;拖拉机
0引言
中国是传统的农业大国,而拖拉机及其改装车是最传统、最必不可少的农用机械。拖拉机在田间作业时存在路面不平、路况多变等客观现实,而以往拖拉机座椅设备比较简陋,为了改善乘坐舒适性,对拖拉机座椅的研究和改进成为必要。为此,可以从轮胎、车架和驾驶座3个方面实现减振,但要求改变驾驶座的系统动态特性时不会影响整车的其他性能[1],而且改变座椅性能应具有制造周期短、见效快及方便易行的优点。
目前,一些大马力拖拉机为了提高乘坐舒适性,驾驶座采用了空气弹簧的被动悬架。这种悬架虽然有一定减振作用,但由于它只是被动地去适应地面传至座椅的振动[2],而且其阻尼特性是根据固定体重的驾驶员而设计的,这种悬架的缺点也非常明显。由磁流变液(MRF)制成的磁流变液阻尼器(MRD)应用于座椅悬架上,可以有效耗散地面激励引起的车辆对驾驶员的振动,改善乘坐舒适性[3];而且由于MRD具有响应快、造价低、寿命长、可调范围大等优点,近年来受到人们极高关注。
因为被动座椅悬架的改善空间非常有限,不能有效地减小低频段振动。所以,本文重点叙述在被动座椅悬架模型的基础上构建半主动座椅悬架的模型来增加拖拉机乘坐舒适性的方法。同时,提出将MRD应用于拖拉机座椅悬架中,构建出阻尼可调的半主动座椅悬架模型,并采用PID控制和模糊控制策略进行Simulink仿真,验证模型的正确性。
1建立各种模型
1.1座椅模型
本文采用某拖拉机的相关参数,结合理论动力学建模的基本理论和前人建模经验[4-5],建立了1/2车型的五自由度振动模型。同时,在此基础上,改座椅悬架的固定阻尼为可变阻尼,建立了基于磁流变阻尼器的半主动模型,如图1所示。
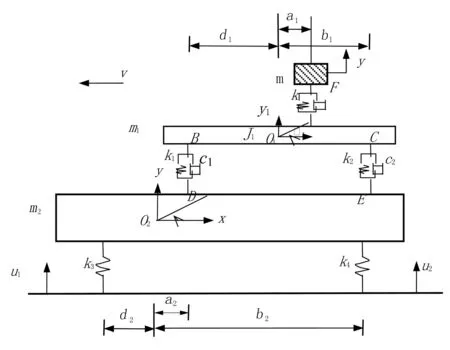
图1 半主动座椅悬架模型
根据牛顿第二定律,被动模型和半主动模型的动力学方程分别为
(1)
(2)
1.2地面输入模型
传递到拖拉机座椅的振动来源主要有发动机振动和地面输入两个方面。由于发动机运转引起的周期振动及其高频振动在很大程度上已经被座椅系统隔离,所以应主要探讨由地面不平所引起的低频范围内的随机振动[5]。根据田间路面不平、路况多变的实际情况,本文选取E级路面激励为非公路田间崎岖路面,采取车速为2km/h。其路面不平度的时域表达式见式(3),仿真框图如图2所示。
(3)
其中,q(t)为路面位移;G0为E级路面不平度系数;u为车辆前进速度;w为均值为0的高斯白噪声;f0为下截止频率[6]。
1.3磁流变阻尼器力学模型
参考Bingham粘弹-塑性模型,可以将磁流变阻尼器的阻尼力等效为基值阻尼与可控阻尼之和;而两者分别与速度和电流相关[7],其表达式为
Fd=FM+Fv,Fv=ceVP
(4)
关于可控阻尼力与电流之间的复杂关系,因条件限制,本文无法进行试验,且该部分不是本文研究的重点。因此,本文采用了文献[8]的试验数据,对其数据进行三阶拟合得出阻尼力与电流的关系为
FM=0.2967I3-1.557I2+2.742I-0.2073
(5)

图2 路面输入模型
2控制策略
由于拖拉机乘坐舒适性是以驾驶员承受的加速度来评价的[9],因此本文以驾驶座的垂向加速度的均方根值(RMS值)最小作为控制的最终目标。MRD产生的阻尼力FM是输入电流与座椅相对运行的非线性函数,所以选择可调磁流变阻尼器运动产生的电流作为控制的目标[8],可以根据最终目标的变化进行实时调节控制,达到最优目标。基于前人研究成果及MRD的非线性特性,本文分别将PID控制、模糊控制应用于半主动座椅悬架系统中进行仿真,并与传统被动模型进行对比分析。
2.1PID控制
PID控制器作为一种线性控制器,主要是根据偏差的变化情况来调节被控量的。本文采用位移式PID算法,算法表达式见式(6),其仿真框图如图3所示。
(6)
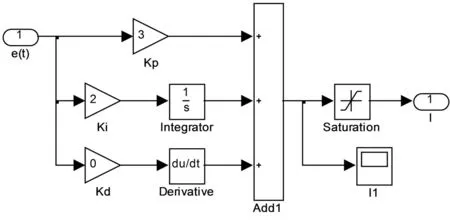
图3 PID控制器
2.2模糊控制
在设计模糊控制器时,以拖拉机驾驶座的速度和速度变化率分别设定为控制器的两个输入E和dE,阻尼器的控制电流设定为输出目标U;非模糊化(defuzzifi cation)采取重心法(centroid);E、dE、U的隶属函数均采用三角函数;模糊子集的论域分别为[-2 2]、[-2 2]、[0 6];模糊子集分别为{NB(负大),NS(负小),Z(零),PS(正小),PB(正大)}、{NB(负大),NS(负小),Z(零),PS(正小),PB(正大)}、{Z(零),S(小),SM(小中),M(中),MB(中大),B(大)};模糊规则语句为“if A and B,then C”;模糊规则及模糊控制器如表1和图4[10]所示。
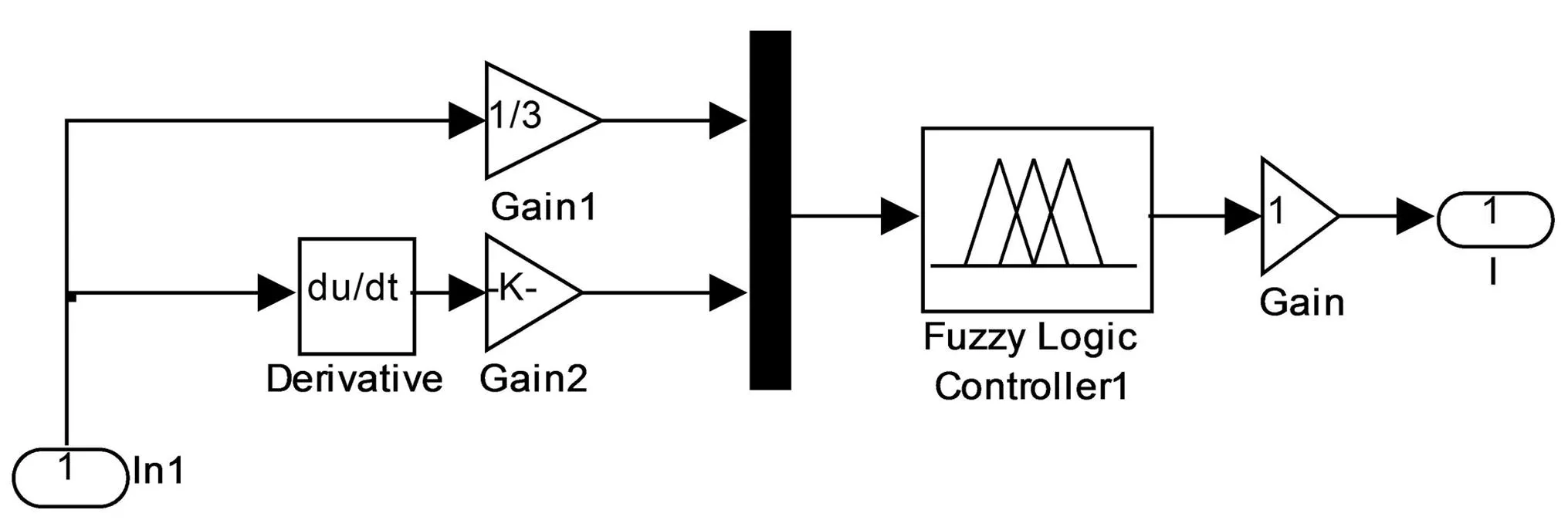
图4 模糊控制器

dEENBNSZPSPBNBBMSMZNSMBSMSMSMSZMZZSMMPSSSSMMMSPBSMMSMBB
3基于MatLab/Simulink的仿真及分析
3.1仿真
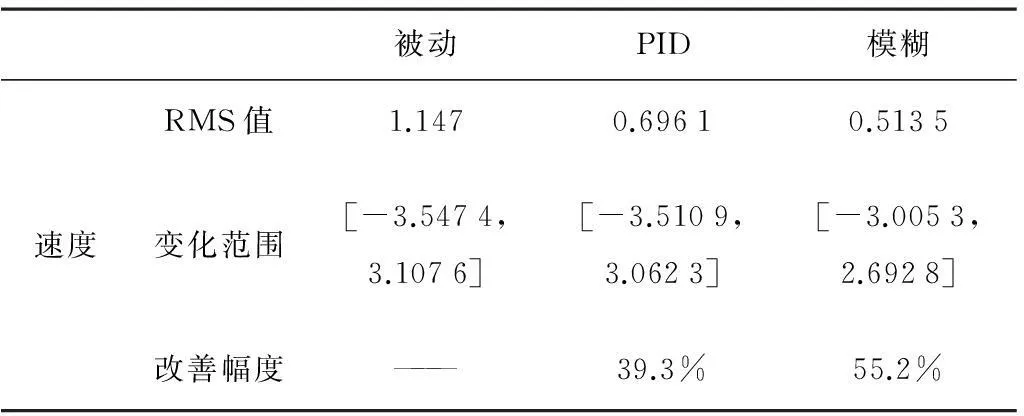
本文根据前面建立的地面输入模型、磁流变阻尼器模型、“车-椅”动力学模型,以及PID控制器和模糊控制器模型,在Simulink环境中分别建立了被动控制、PID控制和模糊控制的仿真框图,如图5、图6和图7所示。同时,结合MatLab编程绘制仿真结果。为便于明显观察和对比分析3种控制,只截取仿真结果的其中一段图像进行展示,并且将3种控制的加速度和速度分别绘于2个图中。将3种控制的加速度及速度的均方根值、变化范围和改变幅度制成表格形式,如表2所示。加速度仿真结果如图8所示,速度仿真结果如图9所示。
3.2分析
由图8和图9可知:当拖拉机行车路况发生改变时,PID控制和模糊控制策略均能很好地跟踪模型。对比仿真结果图8、图9和均方根值表2可知:当白噪声信号激励路面时,基于两种控制的磁流变半主动座椅悬架的座椅加速度和速度都远小于传统的被动座椅悬架;本文所建立的拖拉机五自由度模型正确可靠;采用磁流变阻尼器的半主动座椅悬架可以有效地衰减振动。表2中,对比PID控制、模糊控制下的座椅加速度、速度相对于传统被动悬架的改善百分比和变化范围可以看出:两种控制都具有非常明显的效果,而其中模糊控制为最佳。
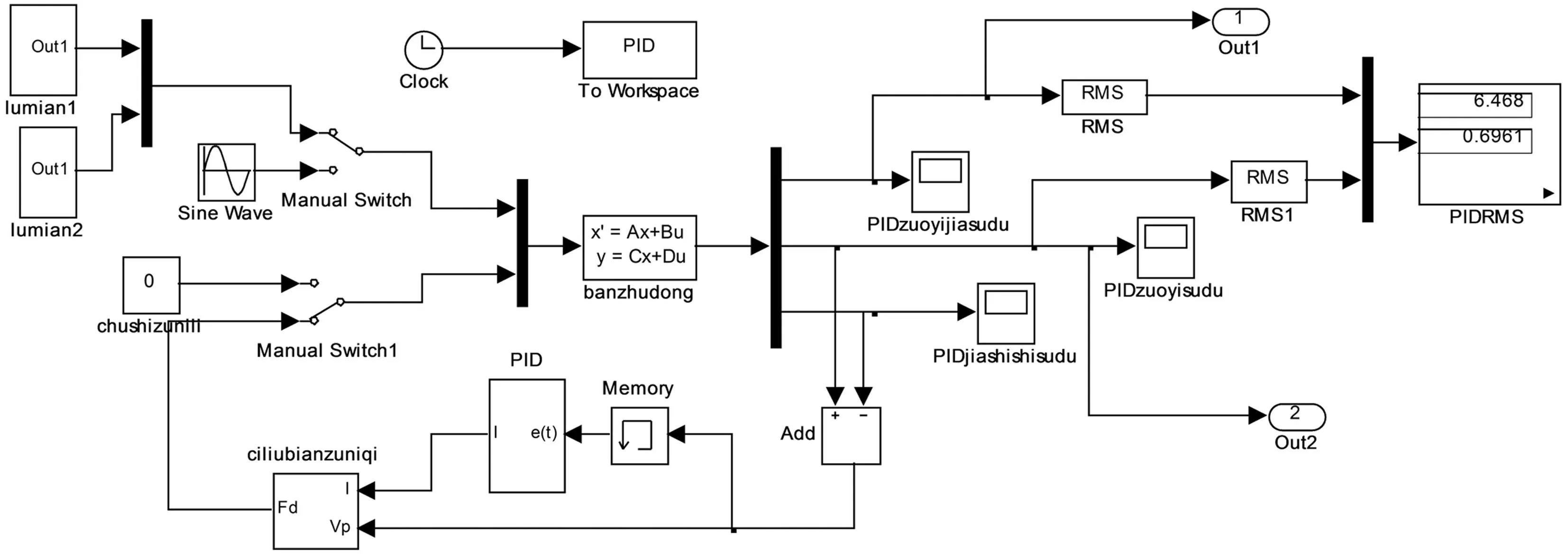
图6 PID控制

图7 模糊控制
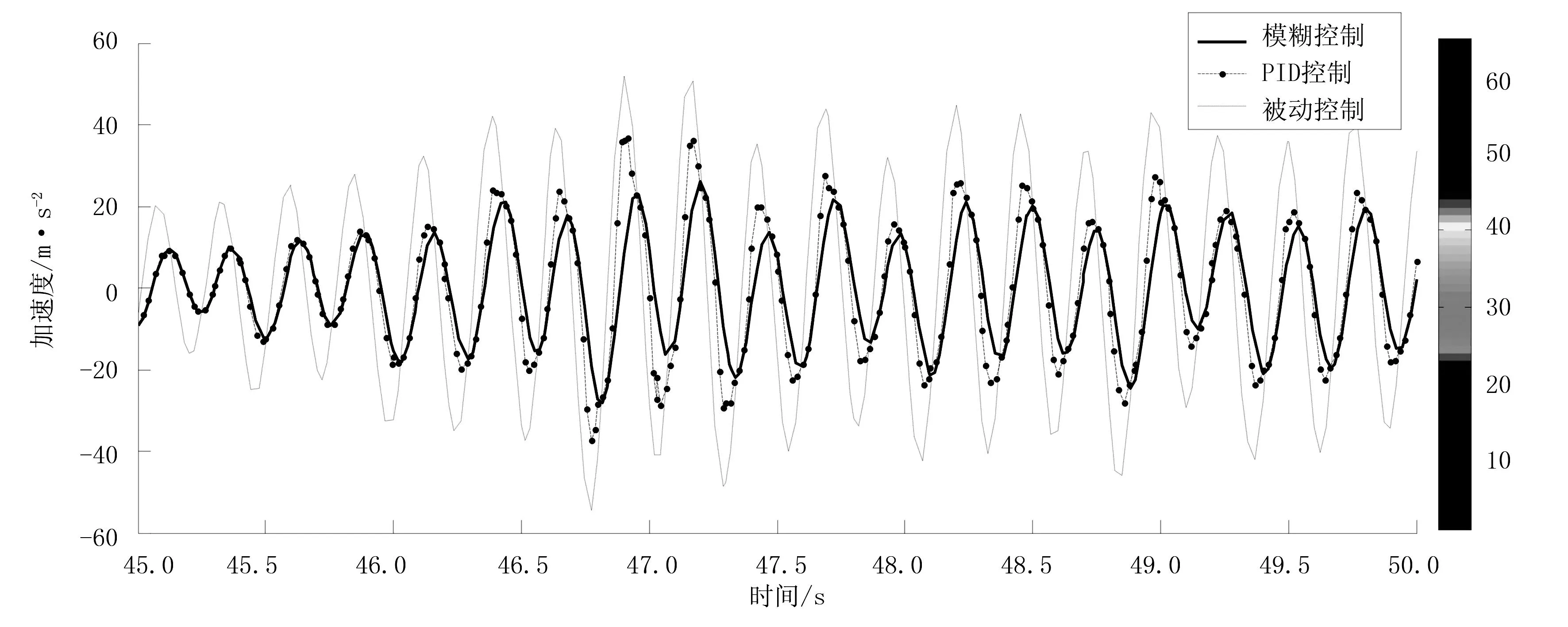
图8 加速度仿真结果图

图9 速度仿真结果图
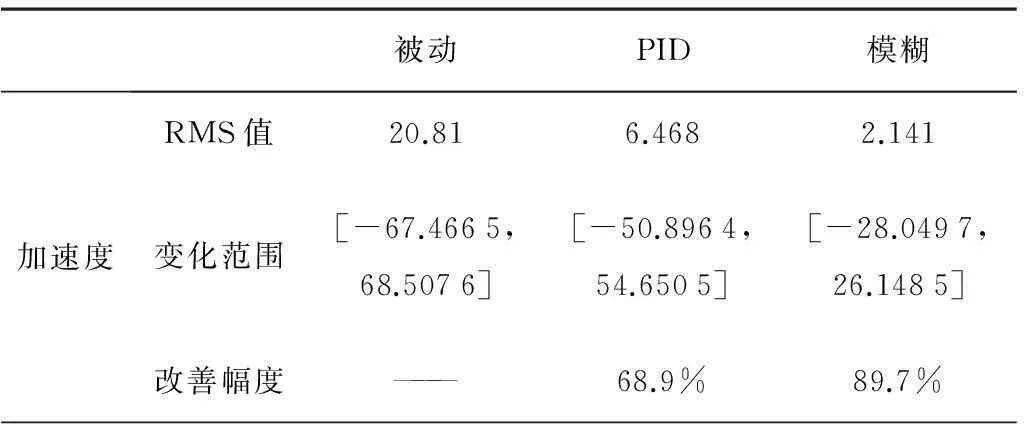
被动PID模糊加速度RMS值20.816.4682.141变化范围[-67.4665,68.5076][-50.8964,54.6505][-28.0497,26.1485]改善幅度———68.9%89.7%
续表2
4结论
仿真结果表明:无论是PID控制,还是模糊控制,对基于磁流变阻尼器的拖拉机半主动座椅悬架系统都有非常有效的减振效果。本文建立的模糊控制模型中,存在运行速度偏慢的问题,初步判定原因是模型偏于复杂,这将是系统须进一步解决和完善的问题。本文所建立的基于磁流变阻尼器的拖拉机半主动座椅悬架模型为今后改进拖拉机的舒适性提供了一种现实可行的思路和方向,具有广阔的应用前景。
参考文献:
[1]黄斌,蒋祖华,严隽琪.汽车座椅系统动态舒适性的研究综述[J].汽车科技, 2001(6):13-16.
[2]宋春桃.车辆座椅的磁流变液减振研究[D].南京:南京理工大学,2007:1-2.
[3]张志勇.半主动座椅悬架控制理论与实验研究[D].长沙:湖南大学,2008:1-5.
[4]李华,戴锦轩.改善拖拉机乘坐舒适性的研究—拖拉机力学模型探讨和座位参数的优化[J].北京农业机械化学院学报,1985(2):61-69.
[5]李华,戴锦轩.改善拖拉机乘坐舒适性的研究[J].农业机械学报,1985(4):13-24.
[6]喻凡.车辆动力学及其控制[M].北京:人民交通出版社,2003:23-24.
[7]薛念文,杨涛,江洪.基于磁流变减振器的半主动车辆座椅悬架的控制仿真研究[J].拖拉机与农用运输车,2010, 37(3):12-13.
[8]杨涛.基于磁流变阻尼器的座椅悬架设计与仿真[D].镇江:江苏大学,2010:19-20.
[9]潘公宇,潘秋华.用磁流变液阻尼可调减振器改善车辆座椅特性的研究[J].工程机械,2007,38 (10):32-35.
[10]冯海生.基于磁流变阻尼器的半主动车辆座椅悬架研究[D].哈尔滨:东北林业大学,2010:42-45.
Modeling and Control of Tractor Semi-active Seat Suspension System
Xu Ruiliang1, Li Sanniu1, Guo Zhijun1, Liu Meizhou1, Ni Qian1, Luo Yuehui2
(1.Vehicle & Motive Power Engineering College, Henan University of Science and Techonology, Luoyang 471003,China;2. Third Assembly Plant,YTO Group Corporation, Luoyang 471004, China)
Abstract:A new idea is designed of applying MRD with the seat suspension to enhance comfort of tractor.The random roughness of road surface input model,the MRD model and the passive seat suspension model are used to establish this semi-active seat suspension system,the PID controller and the fuzzy controller.With the Matlab / Simulink software,the dissertation has a completed simulating analysis between semi-active seat suspension and traditional passive seat suspension. The simulation results indicate that the semi-active suspension is better than the passive seat suspension in restraining the vibtation and enhancing the comfort,and the fuzzy controller is better than the PID controller.
Key words:seat suspension;magneto-rheological damper;control;simulation;tractor
文章编号:1003-188X(2016)01-0039-05
中图分类号:S219.032.9
文献标识码:A
作者简介:徐锐良(1966-),男,河南洛阳人,副教授,硕士生导师,(E-mail )lyxrl@163.com。通讯作者:李三妞(1989-),女,河南新乡人,硕士研究生,(E-mail )1054945965@qq.com。
基金项目:国家高技术研究发展计划项目(2012AA111204)
收稿日期:2015-01-15
猜你喜欢
一重技术(2021年5期)2022-01-18
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
儿童故事画报(2018年4期)2018-05-21
小学生导刊(2017年15期)2017-05-17
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
科技视界(2016年21期)2016-10-17
大众理财顾问(2016年9期)2016-10-11
