
论混合式惯性导航系统
2016-04-13 08:37冯培德
中国惯性技术学报 2016年3期
冯培德
(北京航空航天大学 仪器科学与光电工程学院,北京100191)
论混合式惯性导航系统
冯培德
(北京航空航天大学 仪器科学与光电工程学院,北京100191)
惯性导航系统是当代空、天、海、陆各类先进运载器所不可或缺的一项自主导航定位装备。简要回顾了平台式、捷联式以及旋转式惯导系统的发展历程和各自优缺点,在此基础上提出了集平台式、捷联式和旋转式惯导系统优点于一体的混合式惯导系统新技术途径。介绍了这种新型惯导系统的概念、原理、特点、关键技术,样机实验结果验证了该技术途径的优越性和可行性,为该系统的未来研发和应用提供了技术基础并指出了研究方向。
惯性导航;平台式惯导系统;捷联式惯导系统;旋转式惯导系统;混合式惯导系统
惯性导航系统是基于陀螺、加速度表对运载器角速度和加速度进行测量的一种完全自主式导航系统,它不需外部导航台、站、星的支持,也不需主动对外发出电磁信号,因此在强电磁对抗环境下是空、天、海、陆各类运载器所不可或缺的一项关键设备。本文所提出的混合式惯性导航系统吸取了以往平台式、捷联式和旋转式惯导的各自优点,提出了一种新的技术途径,以满足不同应用领域对惯导提出的新需求,这是我们沿自主创新之路大胆探索的一次重要尝试。
1 混合式惯导系统的提出
回顾惯导技术途径演变的脉络可以帮助我们理解混合式惯导产生的缘由。
1.1 平台式惯导是传统航位推算法的一次飞跃
随着漂移优于0.01 (°)/h的液浮陀螺、零偏优于5×10-5g的液浮加速度表的发展,20世纪50年代初利用陀螺稳定平台来隔离运载器角运动的平台式惯导系统诞生,它大大提高了导航定位精度,使传统的基于速度与航向测量的航位推算导航实现了一次重大飞跃,也使惯性技术成为一项引人瞩目的尖端技术[1]。平台式惯导与捷联惯导相比的最大优点是导航精度高,但其缺点是结构较复杂,体积重量偏大,可靠性较差,成本较高。
1.2 捷联式惯导系统的崛起
20世纪80年代中期随着高速计算机和宽量程激光陀螺的研发成功,促成了捷联惯导系统的问世。捷联惯导系统特点是惯性器件(陀螺、加速度表)与机体相固连,沿机体坐标系的角速度、加速度需经捷联姿态变换后方可完成导航解算。与平台式惯导系统相比,捷联惯导系统部件少,结构简单,在确保导航精度的前提下使准备时间有所缩短,系统体积、重量、成本大幅度减少,可靠性大幅度提高。从技术途径上看其优越性是十分明显的,因此至今捷联惯导已在绝大部分场合取代了平台式惯导,这是惯性技术发展过程中的一个新里程碑[2]。然而捷联惯导对惯性器件性能的重复性、比例系数及安装偏角标定精度都提出了更高的要求,致使进一步提高导航精度遇到困难。
1.3 GPS的冲击
20世纪90年代GPS的问世是人类导航史上的又一次重大突破,它的性/价比远高于惯导,因此在各类运载器上得到普遍推广应用,一度构成了对惯导系统发展的严重冲击。然而卫星导航系统不能直接给出高数据率和高精度的运载器姿态/航向信息,它易受干扰,更严重的是导航星本身在战时也存在受攻击的可能性[3]。随着现代战争中信息对抗的日益白热化和反卫武器的发展,过分依赖卫星导航将会成为武器系统的一根软肋。因此对很多军用运载器来说,具有完全自主导航定位能力的惯导系统仍不可或缺,提高其性/价比也成为重大课题。
1.4 旋转式惯导系统的艰难历程
惯导系统的根本弱点是存在由陀螺剩余常值漂移引起的、随时间积累的位置误差,利用旋转调制效应可以有效抑制这类漂移[4-5]。20世纪60年代美、苏都采用过陀螺壳体旋转法来抑制常值漂移误差,提高惯性器件的精度[6]。20世纪70年代美国DELCO公司研制出轮盘木马-Ⅳ单轴旋转式平台惯导系统,可抑制水平陀螺漂移造成的误差,但该项技术未获广泛应用,可能的原因是:单轴旋转不能调制方位陀螺的漂移;对航向效应漂移缺乏足够认识和应对手段;对旋转条件下的初始对准以及惯性器件敏感轴与旋转轴间的不正交角标定尚未认真研究。据报道,20世纪90年代美国海军为满足潜艇长期潜航的需求,率先研发出了一种单轴旋转式激光陀螺捷联惯导系统MK39,随后又研发出双轴旋转式惯导系统 MK49[7]。近年来又有报道说正在研制舰艇用三轴光纤陀螺旋转式惯导系统。近年来我国一些单位已分别研制出各具特色的舰船用单轴和双轴旋转型激光陀螺捷联惯导系统,在使用同等水平陀螺的条件下,使系统精度比普通捷联惯导可提高一个量级左右,表明旋转式惯导在提高系统精度方面有巨大潜力。然而该类系统在高动态飞行器领域的应用仍鲜见报导,这正是本文要研究的问题。
1.5 混合式惯导应运而生
本文提出的混合式惯导提出了一种新技术途径,它吸收平台式、捷联式、旋转式惯导系统的各自优点,将隔离载体角运动的物理平台、捷联姿态算法与旋转调制抑制误差效应这三者集于一体。该系统主要着眼于高速和高动态运载器对高精度惯导提出的新需求,不仅能大幅度提高导航定位精度,实现快速精确自对准,还可实现装机条件下的自标定以及明显降低购置/维护成本。事实上“双轴旋转”已经突破了“捷联”的概念,混合式惯导则是更上一层楼,加上利用新技术、新器件有效克服稳定平台的原有弱点,将使混合式惯导的生命力日益凸显。由“平台”到“捷联”,再由“捷联”到“平台”,这是“否定之否定”螺旋式上升规律的体现。
2 混合式惯导系统的概念与特点
2.1 混合式惯导的基本概念
1)“平台”与“捷联”的有机结合
基于数字伺服控制的物理稳定平台与基于捷联姿态计算的数学“平台”的有机结合是该混合式惯导系统的首要特征。传统的稳定平台要构造四框架系统,传感器输出经模拟讯号变换和处理后,去控制稳定电机实现稳定功能,因此机电部件和电路板数量多,结构复杂,占用导电滑环数目多。混合式惯导系统采用全数字控制稳定平台,通过捷联姿态变换和特殊算法可用三框平台代替四框平台,加之复杂的控制律的实现和状态切换与监控均由计算机完成,除了简便灵活外,还可明显减小体积重量,提高可靠性,在高动态下即使出现较大的稳定平台偏差,捷联姿态计算仍能保证系统导航功能不致破坏。至于稳定平台通过隔离载体角运动可避免高机动下所引起的捷联惯导系统误差更是不言而喻的优点。
2)可提供稳定、锁定与旋转等多种工作模态
混合式惯导系统处于旋转状态下的工作模态与旋转调制式捷联惯导系统有所不同,前者可实现相对地理坐标系的转动,而后者只能实现相对机箱壳体的转动,当存在载体航向/姿态角运动时,后者的旋转调制效果不如前者。更重要的是混合式惯导系统中的惯性平台指向经常与地理坐标系关联,因此在对准过程中建立起来的惯性器件剩余误差与平台偏角的平衡关系比较容易维持下去,对保证导航精度有利,也可放宽惯性器件长期稳定性的要求。
混合式惯导系统的平台工作状态包括稳定、稳定加旋转和锁定至壳体等三种不同模式,在载体的不同工作阶段可灵活选择每个轴的工作状态。开机首先处于三轴锁定状态。系统初始对准时往往绕方位轴(基本处于垂线方向)旋转,转导航后则可视情选择稳定、锁定或稳定加旋转等任一状态,并可根据不同飞行器在不同飞行段的实际情况选择最佳的旋转策略,飞行器平飞段一般选择一轴旋转另两轴稳定的工作状态。系统处于装机自标定状态下设计人员可视标定项目及精度要求确定不同的转位方案。混合式惯导系统以电锁代替机锁也简化了设计。
2.2 混合式惯导的原理框图
图1中CRP实现旋转平台坐标系到稳定平台坐标系的转换,CPA实现稳定平台坐标系到非正交电机系的转换,CNA实现导航坐标系到非正交电机系的转换。
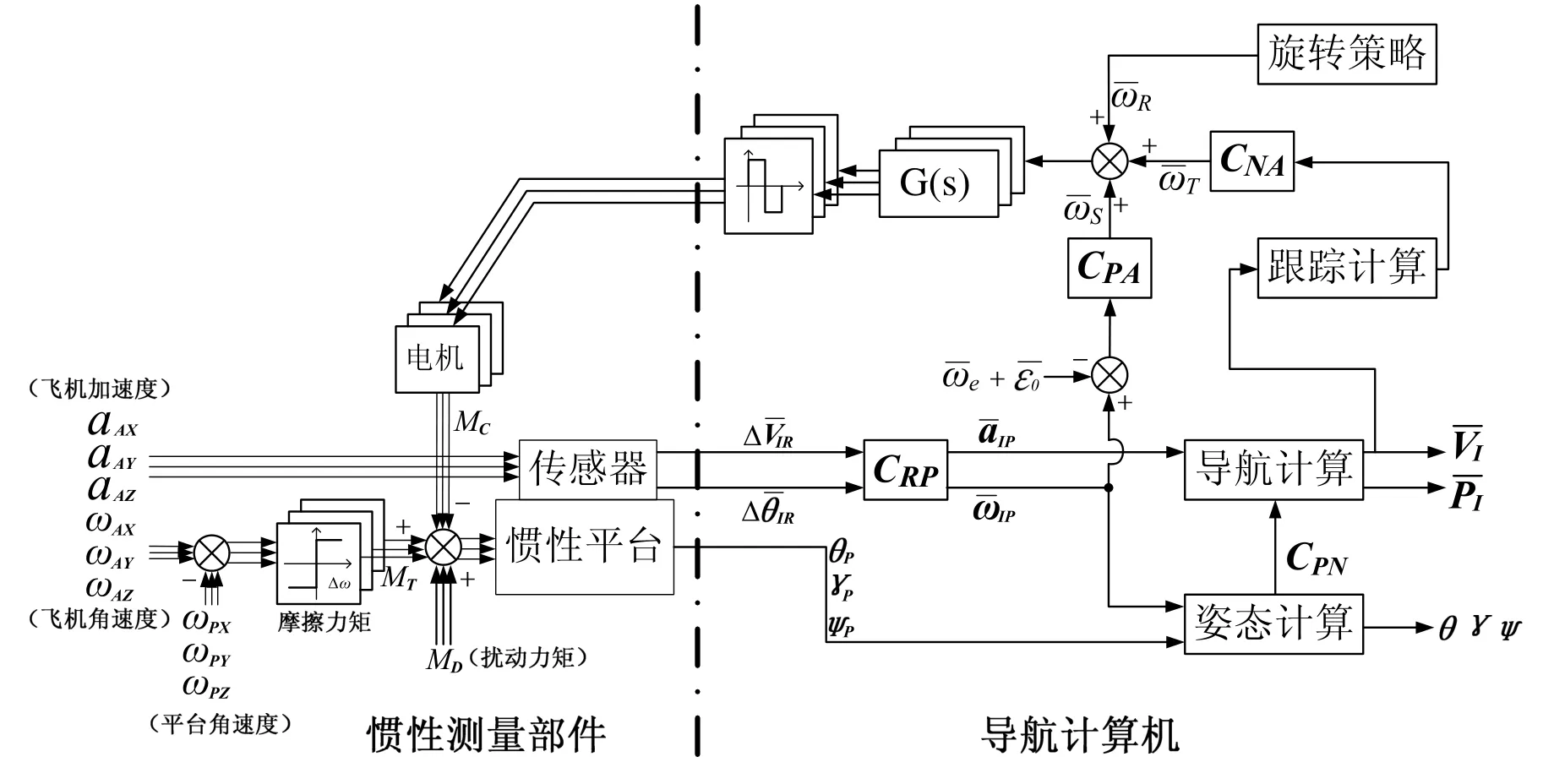
图1 混合式惯性导航系统原理框图Fig.1 Architecture of hybrid inertial navigation system
2.3 混合式惯导的主要特点
1)可满足大幅度提高系统精度的需求
众所周知,旋转式惯导系统在大大提高舰艇导航定位精度方面已获充分验证和广泛应用,而对高动态飞行器来说情况则完全不同,姿态稳定的问题如不解决,旋转调制的效果就会受到很大制约,因此捷联惯导又向平台惯导“回归”有其必然性。应特别指出的是,对于高超声速、大机动飞行器来说,若使用捷联式惯导,因高超声速、大机动的耦合会产生相当可观的速度、位置误差,特别是一些由整流效应产生的误差是过去所不认识的,采用双轴混合式惯导系统或许是解决上述难题的绝好选择。
2)可大大改进系统初始对准的性能
新设计的旋转法对准提高了测量数据的利用效率,可用单位置对准的时间达到双位置对准的效果。在旋转对准过程中能有效估计等效东向陀螺常值漂移,从而避免由其造成的方位对准误差,也可放宽对陀螺漂移长期稳定性的要求。另一方面,旋转法对准对陀螺慢变漂移也有相当的估计能力,因此在系统加电后不需等待陀螺性能完全稳定就可启动对准程序,也十分有利于缩短准备时间[8]。混合式惯导利用旋转法对准可以实现武器系统所提的技术指标,对于机动发射的导弹系统来说,在技术阵地完成初始对准并转导航后,由于旋转调制可在发射车运行期间有效保持其对准精度,因此在发射阵地无需再进行传递对准,从而明显提高武器系统在实战条件下的快速反应能力,意义十分重大。
3)具有装机自标定能力
目前高精度惯导系统普遍要求定期从武器系统上将惯导拆下来,利用精密转台对惯导系统的误差系数进行周期性标定,致使维护工作量大,所需地面设备要求高。近年来使用和研发部门开发了“三自”惯导,实现了自对准、自测试和装机条件下的自标定,取得了良好的效果。混合式惯导系统采用的角度传感器精度和分辨率更高,标定效果会更好。此外可以说是“三自”惯导的升级版,若在系统投入重要使命前先进行标定,“标完即用”比多套系统提前拆装、轮流标定效果更好。装机自标定能力除了大大减少系统日常维护工作量外,还可放宽对惯性器件长期稳定性的要求,可使系统的实用性和可维护性上一个档次。
4)综合性能指标高
在明显提高精度和缩短准备时间的同时,系统的体积重量比传统平台式惯导大大减小,可靠性能明显提高,成本可大幅度降低,其综合性能指标的提高是十分显著的。
3 混合式惯导系统的关键技术
混合式惯导系统是惯导系统技术途径创新的一次重要尝试。在分析论证和样机研制过程中不难看出,它与传统惯导系统相比既是继承又有提高,其特点和优越性十分明显。当然在新技术途径探索的过程中也必然面临诸多新挑战,解决这些问题是混合式惯导系统逐步成熟与实现商品化所必需的。这些问题包括:
1)平台全数字控制迴路设计技术
涉及数字信息采集和处理技术,输入和输出信息的数字变换技术,工作模态转换和监控技术,最佳控制律设计与实现技术等。
2)旋转策略与旋转控制技术
涉及系统在不同工作阶段(指对准、导航、标定)和载体处于不同任务段工作模态选择,最佳旋转策略的制定,转速匀速性和反转的快速性的保证,轴承涡动和惯性器件交叉敏感的处理等。
3)陀螺误差建模与标定技术
涉及陀螺比例系数和敏感轴不对准角的建模与标定,陀螺漂移的壳体效应建模与标定等。光纤陀螺的建模与标定比激光陀螺难度更大。
4)高精度加速度表方案研究
混合式惯导可有效抑制陀螺常值漂移对初始对准及导航性能的影响,于是加速度表比例系数误差就成为高速飞行器导航定位精度最重要的误差源。混合式惯导为减小体积重量宜选用石英加速度表,我们建议研发数字调宽力反馈方案代替模拟力反馈加 I/F变换的方案,以利于有效应对由温度变化和力矩器自身非线性所引起的加速度表误差。
5)初始对准方案研究
旋转对准是惯导系统高精度、快速自对准的最佳解决方案,但在实施上除设法减小陀螺随机游走误差外,还应对陀螺漂移壳体效应的抑制及补偿给予足够的关注。
6)误差系数标定技术研究
混合式惯导采用光栅轴角编码器代替旋转变压器为误差系数的自标定创造了更好的条件,但周期性地正反转对刻度因数和交叉敏感也提出了更高的要求,需研究和制定满足要求的自标定方案。需指出,加速度表的非线性误差系数 K2难以在装机自标定的程序中完成,对其长期稳定性的考核还应另作安排。
7)减小体积重量和提高可靠性的技术研究
混合式惯导系统提供了减小稳定平台体积、重量和提高可靠性的可能性,然而要研发出满足总体要求的产品还需在系统设计和机电器件选择上仔细考量,这对系统、结构和电子领域的设计师们也提出了新的挑战。混合式惯导系统包含“活动”部件,其可靠性与捷联惯导相比存在先天不足,因此更要加强系统的自监控与健康管理,这也是打造惯导系统升级版的一个重要方向。
4 混合式惯导原理样机及试验结果
4.1 原理样机简介
原理样机(见图2)采用三个精度为0.01~0.02 (°)/h的光纤陀螺和三个精度为5×10-5g的石英挠性加速度表。样机体积约460×380×380 mm3,重量约25 kg。

图2 三轴混合式惯性导航系统原理样机Fig.2 Prototype of tri-axis hybrid inertial navigation system
4.2 车载试验结果
混合式惯导系统原理样机进行了5次12 h车载试验,表1为试验结果,表明定位精度优于0.2 n mile/h。图3给出了其中一次试验的位置误差曲线。
表1 样机5次车载导航试验结果Tab.1 Results of prototype in 5 experiments of vehicle navigation
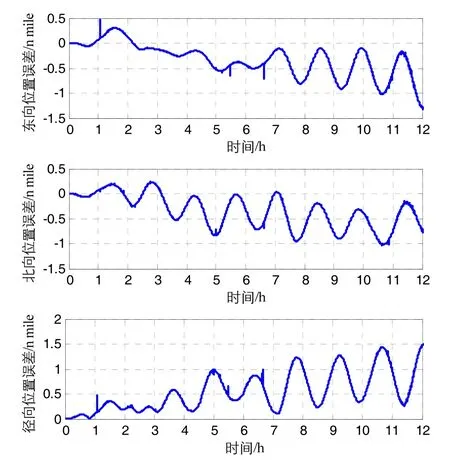
图3 样机一次车载导航试验的位置误差曲线Fig.3 Position errors of prototype in a vehicle navigation experiment
5 结 论
混合式惯导为研发高性能惯导产品提供了一种新技术途径,目前一些关键技术已取得突破,应用前景看好。希望通过本文的发表能引起业界更广泛的关注,能针对不同运载器的新需求进一步开展深入的研究,共同推动惯导技术的创新发展。
最后,我要感谢王玮副教授、王蕾讲师在这项研究和样机研制过程中所做的大量工作。
(References):
[1] Chris G, Karl F, Ralph H, et al. Demonstrating practical inertial navigation: The beginnings and beyond[C]// AIAA Guidance, Navigation, and Control Conference. 2013.
[2] Jwo D J, Shih J H, Hsu C S, et al. Development of a strapdown inertial navigation system simulation platform [J]. Journal of Marine Science and Technology, 2014, 22(3): 381-391.
[3] Atia M M, Liu S, Nematallah H, et al. Integrated indoor navigation system for ground vehicles with automatic 3-D alignment and position initialization[J]. IEEE Transactions on Vehicular Technology, 2015, 64(4): 1279-1292.
[4] Wang L, Wang W, Zhang Q, et al. Self-calibration method based on navigation in high-precision inertial navigation system with fiber optic gyro[J]. Optical Engineering, 2014, 53(6): 064103.
[5] 纪志农, 刘冲, 蔡善军, 等. 一种改进的双轴旋转惯导系统十六位置旋转调制方案[J]. 中国惯性技术学报, 2013, 21(1): 46-50. Ji Zhi-nong, Liu Chong, Cai Shan-jun, et al. Improved sixteen-sequence rotation scheme for dual-axis SINS[J]. Journal of Chinese Inertial Technology, 2013, 21(1): 46-50.
[6] Hays K M, Schmidt R G A, et al. Submarine navigator for the 21st century[C]//IEEE Position Location and Navigation Symposium. 2002: 179 -188.
[7] 陀螺仪与惯性导航专业情报网. 国外惯性技术手册[M]. 北京: 国防工业出版社, 1983: 24-46.
[8] Khairi A, Chris H, Terry M, et al. Increased error observability of an inertial pedestrian navigation system by rotating IMU[J]. Journal of Engineering and Technological Sciences, 2014, 46(2): 211-225.
On hybrid inertial navigation systems
FENG Pei-de
(School of Instrumentation Science and Opto-electronics Engineering, Beihang University, Beijing 100191, China)
Inertial navigation systems are self-contained navigation equipments, which are widely applied in all sorts of advanced vehicles in space, air, marine, and on land. The development process, advantages and drawbacks of platform-, strapdown- and rotatory-type inertial navigation systems are reviewed. Based on these, a new approach, namely hybrid inertial navigation system, is proposed, which combines the advantages of the above three types of inertial navigation systems. The conception, principle, characteristics and key techniques are presented, and the prototype experiment results demonstrate the superiority and feasibility of this novel approach, laying the technical foundation and pointing the research issues for its future development and application.
inertial navigation; platform; strapdown; rotatory; hybrid inertial navigation system
V241.6
:A
2016-04-14;
:2016-05-14
冯培德(1941—),男,研究员,博士生导师,中国工程院院士。E-mail:pdfeng@126.com
1005-6734(2016)03-0281-04
10.13695/j.cnki.12-1222/o3.2016.03.001
猜你喜欢
农业工程学报(2022年5期)2022-06-22
舰船科学技术(2022年10期)2022-06-17
科学家(2022年3期)2022-04-11
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06
中国教育技术装备(2015年21期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11
