某链式武器缓冲装置的动力学仿真研究
2016-07-05 08:27符立华台州科技职业学院浙江台州318020
科技传播 2016年12期
关键词:后坐力
符立华台州科技职业学院,浙江台州 318020
某链式武器缓冲装置的动力学仿真研究
符立华
台州科技职业学院,浙江台州318020
摘要运用多刚体动力学相关的理论和虚拟样机建模技术,在ADAMS软件中建立某型号链式炮击发循环过程的多刚体动力学仿真模型,对比分析缓冲装置关键参数对整个武器系统工作特性的影响规律,并得到一个比较合理的结构参数设计方案,一定程度上减小了该链式武器的后坐力和后坐位移。
关键词链式炮;动力学仿真;后坐力;后坐位移
动力学仿真技术现在已成为机械系统分析、研究、设计中不可缺少的重要手段,在降低系统的研制成本、缩短产品试验周期方面起着越来越重要的作用。ADAMS软件是美国MSC公司开发的,它通过特定的方式创建完全参数化的几何模型,对建立的虚拟几何模型进行静力学、动力学及运动学分析,最后输出位移、速度、加速度和反作用力等曲线[1]。
ADAMS仿真软件能够非常有效的缩短武器系统的研发周期,对于制造费用和实验费用都非常昂贵的链式炮,ADAMS仿真研究的优点更加的突出。
1 建立动力学仿真模型
该链式炮炮身缓冲方式采用的是环形弹簧缓冲。由于环形弹簧的数量比较多,而且是非常复杂的圆锥面之间的相互接触,假如对每个面之间的相互接触都进行定义,势必会大大降低ADAMS软件仿真分析的速度,同时由于环形弹簧在卸载时和加载时工作特点的不同,它们的刚度也是不一样的,因此,在用ADAMS软件进行仿真的时侯,有必要对该弹簧的工作过程进行一定的简化。环形弹簧在加载和卸载时的轴向变形与受力之间的关系可以近似用线性关系进行表达,环形弹簧在加载时和卸载时的刚度k1、k2可用式(1)表示:

式中:n表示环形簧圆锥接触面的对数;A1表示弹簧外圆环的横截面积;A2表示弹簧内圆环的横截面积;E表示弹簧材料的杨氏模量;R01表示弹簧外圆环截面的半径;R02表示内圆环截面的半径;ρ表示摩擦角;β表示圆锥角。
根据本仿真研究的链式炮的工作特性,最后选定弹簧的摩擦角为14°,圆锥角为9°。再把选定的参数通过公式(1)进行计算可得K1=4K2。
施加完载荷、驱动、约束并且对链式炮炮管进行必要的处理后,建立的ADAMS动力学仿真模型如图1所示。
2 结果分析
2.1枪身后坐运动特性
射击过程中该链式炮的后坐位移曲线和后坐力特性曲线如图2所示。

图1 链式炮动力学仿真模型

图2 后坐位移、后坐力特性曲线
对图2的曲线进行分析可以得到,第一发子弹的后坐位移和后坐力比后面四发子弹要小一些,这是因为对系统进行仿真时的开始位置和后面每发弹的循环开始位置是不同的,并且此时武器系统还没有达到稳定的状态,不是本文研究的重点,因此,对第一发子弹引起的后坐位移和后坐力不作对比分析。在t=0.12 s 时,单边后坐力大小是5 086N,这是第一次出现极大值,此时整个武器系统搭载的平台受到的后坐力大小是10 172N;在t=0.15 s 时,前冲的单边作用力为1 675N,此时整个武器系统搭载的平台受到的前冲力大小是3 350N。在t=1.12 s 时,系统的后坐位移为20.45mm,这是第一次出现后坐极大值,在t=0.14 s时,系统的前冲位移为13.38mm,这是第一次出现前冲极大值。
该链式炮采用环形弹簧缓冲器作为缓冲装置。对本文研究链式武器后坐力和后坐位移影响最大的环形弹簧结构参数有直线刚度K、预压力P、加载刚度和卸载刚度之比C,本文通过控制变量法,对这些参数进行了大量的对比分析。
3 改进方案结果分析
为了进行有效的对比分析,文中采用控制变量法的方法。文章中所有的对比分析数据都是在射击速度为600发/分钟,仿真时间为0.5s的射击工况下对比各个参数对链式武器后坐力和后坐位移的影响特性。文章在经过大量ADAMS动力学仿真以后,对每一个仿真得到的曲线进行对比分析,最后选定一组最优环形弹簧结构参数,此时链式武器的后坐情况的得到了明显的改善。最后确定的最优结构参数是:环形弹簧加载时的弹簧刚度K1为170N/mm;卸载时的弹簧刚度K2为28.3N/mm;弹簧预压力P为500N。对采用最优环形弹簧的系统进行仿真,得到的后坐力和后坐位移仿真结果如图3所示。
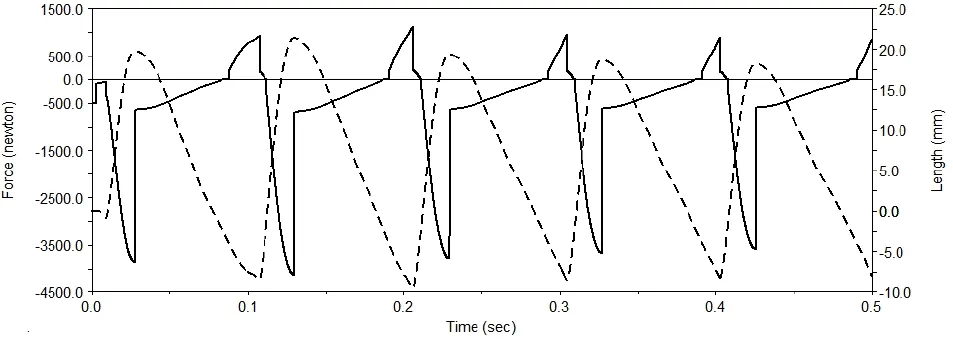
图3 最优方案后坐位移、后坐力特性曲线
分析图3的曲线可以得到,在系统达到稳定后,链式武器的单边后坐力最大值为7 900N,前冲的最大位移为9.53mm,后坐的最大位移为21.35mm,。而采用最初方案时,在系统达到稳定后,链式武器的单边后坐力最大值为10 158N,前冲的最大位移为13.38mm,后坐的最大位移为20.45mm。对比这两个方案的结果可以得出,采用改进方案后,系统单边最大后坐力减小了2 258N,后坐位移最大值增加了0.92mm,前冲位移最大值降低了3.84mm。可以看出,最大后坐力得到了明显的降低,虽然后坐位移最大值有所增加,但仿真结果显示,这个后坐位移仍然能够满足武器系统的设计要求。同时链式武器的前后总体位移值降低了2.92mm,这在一定程度上能够提高链式武器的射击稳定性。
4 结论
本文是基于ADAMS的链式炮运动机构及缓冲装置进行了动力学仿真,对研究该链式炮缓冲装置对后坐力和后坐位移影响规律有很大的参考价值,并提出了一个相对合理的缓冲装置参数方案,很大程度上缩短了该链式炮的研发周期。
参考文献
[1]郭卫东.虚拟样机技术与ADAMS应用实例教程[M].北京:北京航空航天大学出版社,2008.
[2]何志强,黄守仁,李载弘.航空自动武器设计手册[M].北京:国防工业出版利,1990.
[3]张英会.弹簧[M].北京:机械工业出版社,1982:280-310.
[4]曾晋春,杨国来,王晓峰.某火炮自动机虚拟样机建模与仿真[J].火炮发射与控制学报,2008(1):42-45.
[5]王宝元,梁世瑞,周发明.火炮自动机平面运动凸轮机构多体系统运动分析[J].火炮发射与控制学报,2000(3):13-15.
中图分类号TP39
文献标识码A
文章编号1674-6708(2016)165-0225-02
作者简介:符立华,台州科技职业学院。
猜你喜欢
兵器装备工程学报(2021年6期)2021-07-13
轻兵器(2020年7期)2020-07-23
科学与技术(2019年12期)2019-03-29
山东工业技术(2017年18期)2017-09-12
现代兵器(2016年11期)2016-11-23
中国机械工程(2016年11期)2016-06-27
兵器知识(2016年3期)2016-03-21
机械与电子(2015年9期)2015-06-09
中国医药科学(2015年3期)2015-02-22
火炮发射与控制学报(2012年2期)2012-11-22