基于改进DE算法的定时拦截能耗优化方法*
2016-07-21 05:11王超谭飞谭守林杨世荣郭玮林
现代防御技术 2016年2期
王超,谭飞,谭守林,杨世荣,郭玮林
(1.第二炮兵工程大学,陕西 西安 710025; 2.第二炮兵驻西安军事代表办事处,陕西 西安 710025;3.中国人民解放军61683部队,北京 100094)
基于改进DE算法的定时拦截能耗优化方法*
王超1,谭飞2,谭守林1,杨世荣3,郭玮林1
(1.第二炮兵工程大学,陕西 西安710025; 2.第二炮兵驻西安军事代表办事处,陕西 西安710025;3.中国人民解放军61683部队,北京100094)
摘要:在满足对目标卫星在指定时间拦截的要求下,以拦截器变轨能量消耗最省为优化指标,构建了定时拦截变轨能耗计算模型,提出了运用改进差分进化算法优化拦截器变轨能耗的方法。仿真结果表明:改进差分进化算法能够在更短的时间搜索到更优的变轨时间及其对应的变轨能耗,并且算法具有较好的稳定性和收敛性。
关键词:拦截器;定时拦截;能量消耗;改进差分进化算法;能耗优化;变轨时间
0引言
空间动能拦截器是反卫的有效利器,其在脉冲作用下变轨并快速机动到达指定位置于特定时间拦截目标卫星。但由于拦截器有效变轨能量有限,其机动变轨能耗必须小于有效变轨能量,因此在拦截轨道优化设计中往往要考虑能量约束并以变轨能耗最省作为拦截轨道优化指标[1-5]。
目前求解以拦截能耗最省为优化指标的卫星定时拦截问题的方法是一维搜索法,一维搜索法简单易行,但存在若搜索时间短就很难搜索到较优的拦截能耗,若要搜索较优的拦截能耗就需较长搜索时间等问题。一维搜索法包括斐波那契法、黄金分割法和等分法等。其中,等分法求解最省拦截能耗的思路是:首先将连续的拦截器可变轨拦截时间段均分为若干段,并取每段中点对应的时刻作为拦截器变轨时刻;然后根据Lambert定理[6-7],求解拦截器在各变轨时刻变轨拦截卫星所需的能量;最后选择能耗最小值对应的时刻作为拦截器最优变轨时刻。
针对一维搜索法求解拦截能耗最省问题存在的不足,本文尝试基于DE(differential evolution)算法求解该问题。基于DE算法是一种基于实数编码的具有保优思想的贪婪遗传算法[8-9],具有求解速度快、需要初始值少等特点,适合于求解拦截器变轨能耗优化等复杂的优化问题,能够在较短的时间搜索到较优的变轨能耗。但DE算法求解时存在早熟收敛现象,针对该现象,本文引入自适应变异算子,以避免其在求解中出现该问题,进一步提高算法性能。
1定时拦截在轨拦截器变轨耗能模型构建
如图1所示,在定时拦截条件下,拦截器变轨点A有无数个,而拦截点B只有一个。当变轨时间T确定后,拦截器变轨点A的位置可被确定,其从变轨点A飞行到拦截点B的时间Δt也被确定。则根据Lambert定理可知,每个飞行时间Δt只对应一个变轨速度增量Δv。因此只需遍历计算每个飞行时间Δt对应的变轨速度增量Δv,并选择Δv最小值对应的变轨时间作为最优变轨时间,便确定了最优变轨时间及最省变轨能耗。

图1 拦截器变轨点选择示意图Fig.1 Diagram of interceptor transfer position
假设拦截器初始轨道W的轨道根数为(a1,e1,i1,Ω1,ω1,M1),目标卫星轨道M的轨道根数为(a2,e2,i2,Ω2,ω2,M2),并令变轨时间T对应的变轨点矢径为r1。
如图1所示,矢径r1和r2的夹角为
(1)
设在轨道W上飞行的拦截器和轨道L上飞行的目标卫星的动量矩单位矢量分别为hW和hL,则有
(2)
轨道W和轨道L在变轨点A处的轨道切线夹角为
(3)
用常数l,l′分别表示下列值,即
(4)
式中:r1和r2分别为模量;μ为地球引力常数。
由航天动力学知,高斯第一方程为

(5)
高斯第二方程为
(6)
则可根据式(5),(6),并通过迭代方法求出Y和ΔE值。
得到Y和ΔE值后,便可求拦截轨道L的半通径p、半长轴a的值为

(7)
由轨道能量守恒方程和动量矩守恒公式则可计算出拦截器从A点进入轨道L所需要的速度值vL[10],其计算公式为
(8)
根据图1中的vW,vL,Δv三者间的矢量关系[11],便可求出拦截器在T时刻变轨所需的速度增量Δv,其计算公式为
(9)

(10)
2改进DE算法优化拦截器变轨能耗
DE算法存在的早熟收敛现象与变异概率有关。如果变异概率太大,DE算法在搜索初期收敛速度很快,导致最优解在其寻优过程中易遭到破坏;而若变异概率太小,易导致解算结果为局部最优解,出现早熟现象[12-13]。针对DE算法在搜索初期收敛速度很快,而在后期容易陷入局部最优的问题,本文引入自适应变异算子,采用一种修正DE算法的变异操作[14-15],以避免其在求解最优能耗中出现的早熟收敛现象。
2.1空间定时拦截能耗优化的标准DE算法
空间定时拦截能耗优化的DE算法的基本步骤如下:
(1) 可行解空间确定
令拦截器接收拦截任务时间为T0,拦截时间为T1,则变轨飞行时间Δt∈(0,T1-T0)。以飞行时间Δt作为DE算法的种群个体,则种群个体的可行解空间为(0,T1-T0)。
(2) 种群初始化
在可行解空间按式(11)产生初始种群:

i=1,2,…,NP,
(11)
式中:Δti(0)为第0代种群中第i个个体;rand[0,1]为[0,1]区间上的随机数;NP为种群规模。
(3) 变异操作
在种群中随机选择3个不同的个体进行变异操作,个体变异操作方程为

(12)
(4) 交叉操作
(13)
式中:rand(j)为[0,1]之间的均匀分布随机数;CR为范围在[0,1]之间的交叉概率;rnbr(i)为[1,D]之间的随机整数。
(5) 选择操作
(14)

2.2DE算法的改进
为有效解决早熟收敛现象,本文在DE算法的变异操作上作了一定的修正,引入一个自适应变异率λ,根据算法的搜索进展情况,自适应地确定变异率,以更好地适应搜索过程的变化,定义该算法为MDE算法。这样,在算法初期可以保持种群多样性并避免早熟收敛,随着算法进展逐步降低变异率使种群中的优秀个体免遭破坏,增加了搜索到全局最优解的概率。λ以及自适应算子M的表示方法如下:
(15)
M=F0·2λ,
(16)
式中:G为最大迭代次数;g为当前迭代次数;F0为变异参数。
由于1≤g≤G,则始终存在

在算法初期,迭代次数g取1,因而λ=1,使变异率M=2F0,具有较大的变异率,从而在初期保持个体的多样性,避免早熟;随着算法的进行,迭代次数g增加,λ逐渐减小且随指数曲线越来越接近于0,从而变异率M也随之减小并逐渐靠近F0,使最优解免遭破坏。
2.3改进DE算法求解拦截器最优变轨能耗
改进DE算法求解拦截器最优变轨能耗的具体步骤如下:
步骤1:初始化参数。
设定种群规模NP为50,最大迭代次数G为60,交叉概率CR为0.4,变异参数F0为0.5。
步骤2:随机产生50个初始种群个体。

步骤3:计算初始种群每个个体的适应度Δv,得到最优适应值Δvbest和最优个体Δtbest。
步骤4:引入参数λ,根据式(15),(16)计算变异率,并用式(12)实现变异。

步骤8:令g=g+1,转入第4步重复上述步骤,若达到最大迭代次数G,则终止迭代。
3定时拦截变轨能耗仿真与分析
3.1定时拦截变轨能耗仿真起算数据
将需要变轨的拦截器记为SW,所要拦截的目标卫星记为TS,变轨能耗起算数据如表1所示。

表1 仿真起算数据表
3.2拦截器变轨耗能计算仿真
根据表1中的仿真起算数据,利用等分法和改进DE算法搜索最优变轨时间及其对应的最省变轨能耗,其计算结果如表2,3所示。
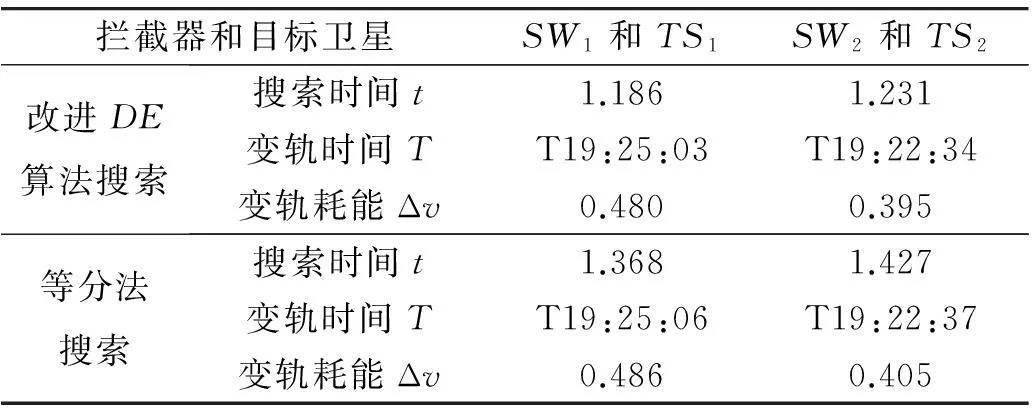
表2 T=19:40:00时,等分法和改进DE算法搜索结果
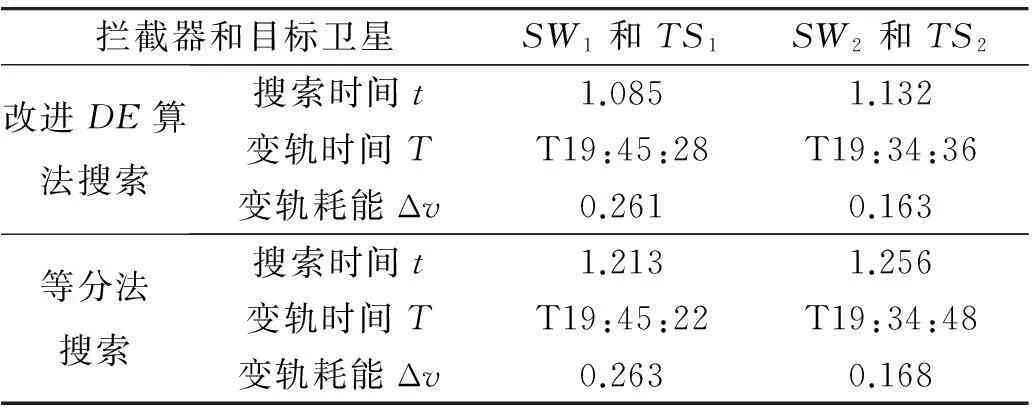
表3 T=20:10:00时,等分法和改进DE算法搜索结果
3.3拦截器变轨耗能分析
由表2,3中2种算法的搜索结果可知,在本文仿真中,当T=19:40:00,T=20:10:00时,改进DE算法分别将最优结果搜索时间从1.368,1.427,1.213,1.256缩短到1.186,1.231,1.085,1.132,将拦截器变轨能耗从0.486,0.263,0.405,0.160减少到0.480,0.261,0.395,0.163。从优化结果的对比可以看出:利用改进DE算法求解的拦截器1和拦截器2变轨能耗Δv都要比利用等分法求解的变轨能耗Δv少,且利用改进DE算法搜索到最优结果所需要的搜索时间都比等分法搜索到最优结果所需要的搜索时间要短。
4结束语
本文对标准DE算法进行了改进,并将其应用于定时拦截条件下拦截器变轨能耗问题的优化。其优化结果与等分法搜索结果的对比表明:改进DE算法能够搜索到更优的变轨能耗且搜索时间更短,可以有效的求解定时拦截能耗优化问题,能为解决空间拦截器变轨能耗优化问题提供一定的方法支持。
参考文献:
[1]陈小刚,吴志林,高宇. 基于能量的天基拦截轨道设计与优化[J].计算机仿真,2012,29(5):59-63.
CHEN Xiao-gang,WU Zhi-lin,GAO Yu. Design and Optimization of Space-Based Interception Orbit Based on Energy[J].Computer Simulation, 2012,29(5):59-63.
[2]丁濛,童若锋,董金祥.大范围轨道机动的燃料消耗优化方法[J]. 航天控制,2008,28(6):47-53.
DING Meng,TONG Ruo-feng,DONG Jin-xiang. Optimization Methods for Fuel Consumption in Large-Scale Spacecraft Orbit Maneuver[J]. Aerospace Control, 2008,28(6):47-53.
[3]谭守林,王大彤,吕连朋,等.基于最短拦截时间的异面拦截机动轨道设计与优化[J].指挥控制与仿真,2013,35(5):88-90.
TAN Shou-lin,WANG Da-tong,LÜ Lian-peng,et al. Designing and Optimizing of Interception Transfer Path Based on Different the Shortest Interception Time[J]. Command Control and Simulation, 2013,35(5):88-90.
[4]王大彤,谭飞,吕连朋,等.基于非线性规划算法的空间机动拦截优化[J].四川兵工学报,2013,34(9):44-46.
WANG Da-tong,TAN Fei,LÜ Lian-peng,et al. Optimization of Many Pulses of Maneuvering to Intercept Based on Nonlinear Programming[J].Journal of Sichuan Ordance,2013,34(9):44-46.
[5]李四平,刘锦阳,国凤林,等.轨道机动的时间-能量综合最优控制[J].宇航学报,2010,31(1):137-142.
LI Si-ping,LIU Jin-yang,GUO Feng-lin,et al. Time-Energy Comprehensive Optimal Control of Orbital Maneuvering[J]. Journal of Astronautics, 2010,31(1):137-142.
[6]魏鹏涛,雷刚,郭洪娜,等.基于 Lambert 转移的虚交点轨道拦截优化[J].飞行力学,2012,30(6):556-559.
WEI Peng-tao, LEI Gang, GUO Hong-na, et al. Orbit Interception at Virtual Crossing Point Based on Lambert Transfer[J]. Flight dynamics,2012,30(6):556-559.
[7]张鹏宇,杨明,王子才.基于lamberrt定理的拦截器推进段飞行方案研究[J].黑龙江大学自然科学报,2007,24(1):58-62.
ZHANG Peng-yu, YANG Ming, WANG Zi-cai.Research on Interceptor Flight Method in Boost Phase Based on Lambert Theorem[J].Journal of Natural Science of Heilongjiang University,2007,24(1):58-62.
[8]刘波,王凌,金以慧.差分进化算法研究进展[J].控制与决策,2007,22(7):21-28.
LIU Bo,WANG Ling,JIN Yi-hui. Advances in Differential Evolution[J].Control and Decision, 2007,22(7):21-28.
[9]周艳萍,顾幸生.差分进化算法研究进展[J].化工自动化及仪表,2007,34(3):1-5.
ZHOU Yan-ping,GU Xing-sheng. Development of Differential Evolution Algorithm[J]. Control and Instruments in Chemical Industry, 2007,34(3):1-5.
[10]RANIERI C L. Path-Constrained Trajectory Optimization for Proximity Operations [R].AIAA-2008-6275,2008.
[11]宁咨文,于小红.天基动能拦截器变轨速度增量误差分析[J].装备指挥技术学院学报,2004,15(3):41-44.
NING Zi-wen,YU Xiao-hong. Error Analysis of Orbit Transfering Velocity Increment on KKV in Space[J]. Journal of the Academy of Equipment Command& Technology,2004,15(3):41-44.
[12]张雪霞,陈维荣,戴朝华. 带局部搜索的动态多群体自适应差分进化算法及函数优化[J].电子学报,2010,38(8):1825-1830.ZHANG Xue-xia,CHEN Wei-rong,DAI Chao-hua. Dynamic Multi-Group Self-Adaptive Differential Evolution Algorithm with Local Search for Function Optimization[J]. Acta Electronic Sinica, 2010,38(8):1825-1830.
[13]傅阳光,周成平,胡汉平.无人飞行器海上航迹规划差分进化算法研究[J].兵工学报,2012,33(3):295-300.
FU Yang-guang,ZHOU Cheng-ping,HU Han-ping. Research on Differential Evolution Algorithm for Path Planning for Unmanned Aerial Vehicle in Ocean Environment[J]. Acta Armamentaria,2012,33(3):295-300.
[14]熊伟丽,陈敏芳,王肖,等.运用改进差分进化算法辨识Hammerstein模型[J].南京理工大学学报,2013,37(4):536-542.
XIONG Wei-li,CHEN Min-fang,WANG Xiao,et al. System Identification Method for Hammerstein Model Based on Improved Differential Evolution Algorithm[J].Journal of Nanjing University of Science and Technology, 2013,37(4):536-542.
[15]彭志红,孙琳,陈杰. 基于改进差分进化算法的无人机在线低空突防航迹规划[J].北京科技大学学报,2012,34(1):96-102.
PENG Zhi-hong,SUN Lin,CHEN Jie. Online Path Planning for UAV Low-Altitude Penetration Based on An Improved Differential Evolution Algorithm[J]. Journal of Beijing University of Science and Technology, 2012,34(1):96-102.
Energy Consumption Optimization of Orbital Transfer on Schedule Interception Time Based on Improved Differential Evolution Algorithm
WANG Chao1,TAN Fei2,TAN Shou-lin1,YANG Shi-rong3,GUO Wei-lin1
(1. The Second Artillery Engineering University,Shaanxi Xi’an 710025,China;2.The Military Representative Office of the Second Artillery in Xi’an,Shaanxi Xi’an 710025,China;3.PLA,No.61683 Troop,Beijing 100094,China)
Abstract:Given the minimum energy consumption of space based on weapon transfer, energy consumption computational model is built and an improved differential evolution algorithm which optimizes the transfer of energy consumption based on the schedule interception time is put forward. Simulation result indicates that this algorithm has preferable stability and convergence, and the algorithm can search much better interceptor transfer time and corresponding energy consumption in less time.
Key words:interceptor; schedule interception time; energy consumption; improved differential evolution algorithm; optimization of energy consumption; the interceptor transfer time.
*收稿日期:2014-09-07;修回日期:2015-07-15
作者简介:王超(1990-),男,河南信阳人。硕士生,研究方向为飞行器设计。
通信地址:710025陕西省西安市灞桥区洪庆镇同心路2号 4503分队E-mail:112915459@qq.com
doi:10.3969/j.issn.1009-086x.2016.02.005
中图分类号:TJ861;TN919
文献标志码:A
文章编号:1009-086X(2016)-02-0032-05
空天防御体系与武器
猜你喜欢
体育科技文献通报(2022年4期)2022-10-21
制导与引信(2022年2期)2022-07-22
体育科技文献通报(2022年3期)2022-05-23
无人机(2022年2期)2022-05-20
轻兵器(2022年5期)2022-05-19
指挥控制与仿真(2021年3期)2021-06-15
作文中学版(2020年1期)2020-11-25
上海航天(2018年3期)2018-06-25
汽车文摘(2017年5期)2017-12-05
山东工业技术(2017年6期)2017-03-28