分布式干扰下雷达探测区三维建模与仿真
2016-08-18 07:49刘正堂程彦杰
火力与指挥控制 2016年7期
刘正堂,程彦杰,马 辉
(中国洛阳电子装备试验中心,河南 洛阳 471000)
分布式干扰下雷达探测区三维建模与仿真
刘正堂,程彦杰,马辉
(中国洛阳电子装备试验中心,河南洛阳471000)
建立了分布式干扰条件下雷达探测区平面模型,并根据雷达、探测目标以及干扰机的空间位置关系,对平面模型进行拓展,建立了分布式干扰条件下雷达探测区三维模型,并对模型进行了仿真计算,直观地显示了分布式干扰条件下雷达在空间各个方向的探测范围,为雷达网部署提供决策依据。
分布式干扰,雷达探测区,三维模型
0 引言
分布式干扰即用一定数量功率低、体积小、重量轻、价格低廉的投掷式干扰机或以小型无人机为载体的电子干扰机飞近敌方阵地,自动或受控地对选定的敌方军事电子设备进行针对性干扰,能够有效对抗超低旁瓣、旁瓣对消、波瓣自适应零点控制等雷达新技术以及组网雷达、被动雷达、双(多)基地雷达等新体制雷达。本文针对分布式干扰条件下雷达受到压制干扰的情况,进行三维建模与仿真计算,分析计算了干扰机处于不同位置时雷达探测区变化情况,全方位展示了雷达在分布式干扰情况下的探测区域。仿真结果表明,所建立的模型能够真实展现分布式干扰情况下雷达的探测区域的空间分布情况,可对雷达的部署决策提供技术支撑。
1 分布式干扰条件下雷达探测区平面模型
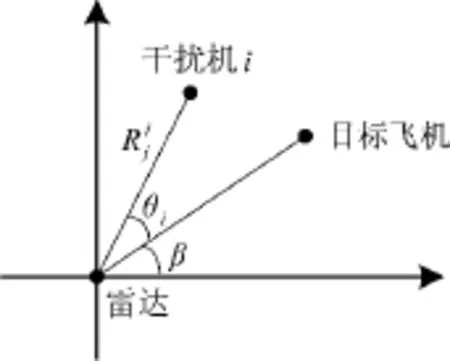
图1 分布式干扰下干扰机与雷达平面位置关系模型
考虑多部干扰机和雷达处于同一平面时的情形,如图1所示,以雷达为原点建立直角坐标系,设雷达发射机功率为Pt,发射天线的增益为Gt,接收天线增益为Gr,目标的散射截面积为σ,目标到雷达的距离为R,雷达波长为,雷达波损耗因子为L,则雷达接收机处接收回波功率Pr为:

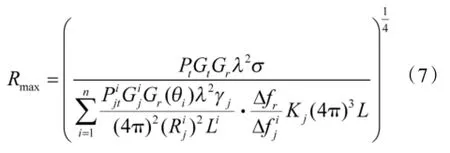
考虑干扰机的频率、干扰时机和干扰样式都能和雷达匹配的情况,假定有n部干扰机以分布式干扰的方式对雷达同时实施干扰,雷达主瓣指向目标飞机时(角度为β),第i(i=1,2,…,n)部干扰机(以下简称干扰机i)的干扰信号进入雷达的功率为:


其中,θ0.5为雷达主瓣宽度,K为常数。则n部干扰机进入雷达的总功率为:

此时的雷达方程为:

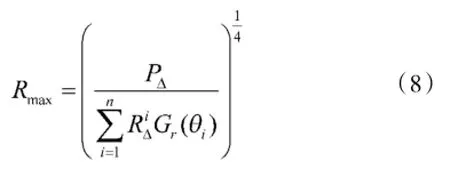
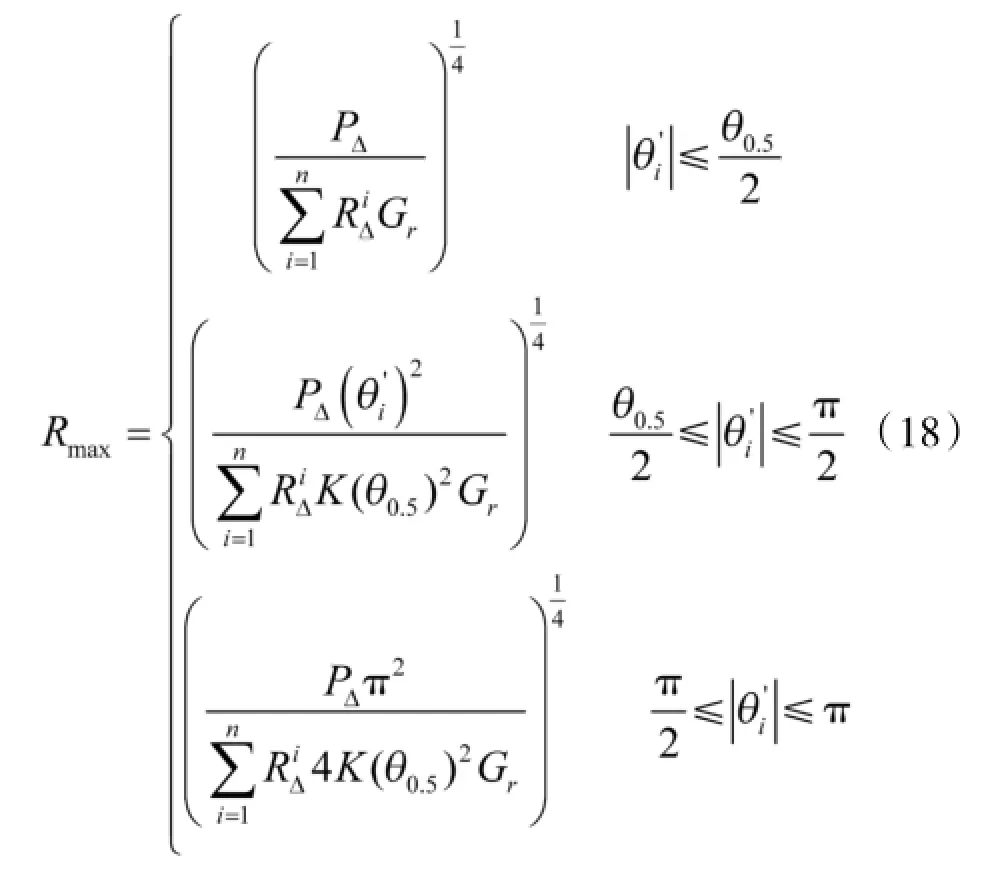
可求得此时的最大探测距离Rmax为:
分布式干扰条件下,单个干扰机时,雷达探测区二维仿真示意图如图2所示;有两个干扰机时,雷达探测区二维仿真示意图如图3所示。
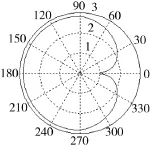
图2 单个干扰机时,雷达探测区二维仿真示意图
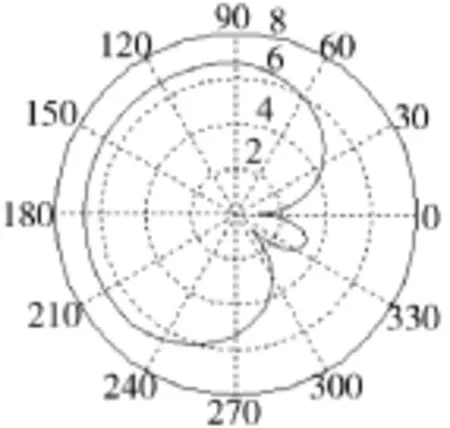
图3 两个干扰机时,雷达探测区二维仿真示意图
从图中可以看出当单个干扰机对雷达进行干扰时,雷达探测区边界是以雷达和干扰机水平连线为轴,上下对称的一个心形曲线。曲线之外是干扰压制区,曲线之内是雷达探测区。当有两个干扰机进行干扰时,雷达探测区形成了两个缺口,干扰压制区变大,但两个干扰机之间有一个探测主瓣。
2 分布式干扰条件下雷达探测区三维模型
随着雷达对抗技术的发展,其在现代作战中的作用越来越突出,二维雷达探测区已经不能满足作战指挥的需要,战场指挥员迫切需要知道在干扰条件下,雷达在空间不同位置的探测区域。因此,本文利用天线方向图的简化模型,将雷达探测区模型从二维平面拓展到三维空间,并在三维空间中准确描绘出来,实时显示受干扰下雷达在空间不同位置的探测区域,为战场指挥员实施干扰决策提供依据。
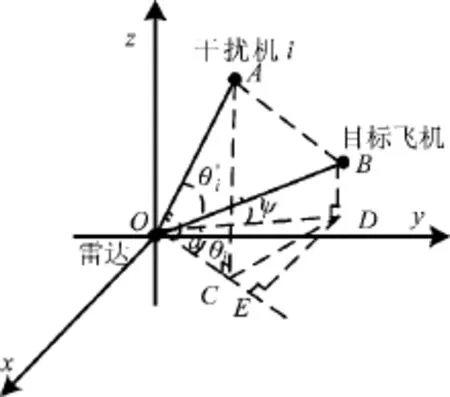
图4 分布式干扰下干扰机与雷达空间位置关系模型
如图4所示,雷达所处位置为原点O,干扰机i和目标飞机在空间的位置分别为A、B,干扰机相对雷达的仰角∠AOC为a,目标飞机相对于雷达的仰角∠BOD为Ψ,干扰机i和目标飞机相对于雷达的张角为θi',干扰机i和目标飞机在xy的投影C,D相对于雷达的张角∠COD为θi。
根据图中的位置关系,可知:

根据余弦定理,可得:

将式(11)代入式(15),经过计算可得:

即:

由式(17)可知,对于伴随干扰,干扰机在空中对地面预警雷达进行干扰,此时需要考虑干扰机相对于雷达的仰角a的影响,将θi'代替式(8)中的θi并根据式(3)可得此时的预警雷达探测区域为:
如果是地面干扰机对地面雷达进行干扰,干扰机相对于雷达的仰角a一般非常小,经常忽略不计,即a=0,此时:。如果是空中干扰机对地面雷达进行干扰,则需要考虑干扰机仰角a的影响,此时'由投影张角θi、干扰机仰角a以及目标飞机仰角Ψ共同决定。
3 仿真试验及分析
由于雷达体制、天线类型等诸多方面的原因,雷达探测区都存在一定的盲区,即处于雷达有效作用距离范围内而又探测不到目标的区域,如低空盲区、顶空盲区等。本文不考虑雷达盲区的影响,对雷达三维探测区进行仿真分析。

图5 干扰机仰角为0°时雷达探测区正视图
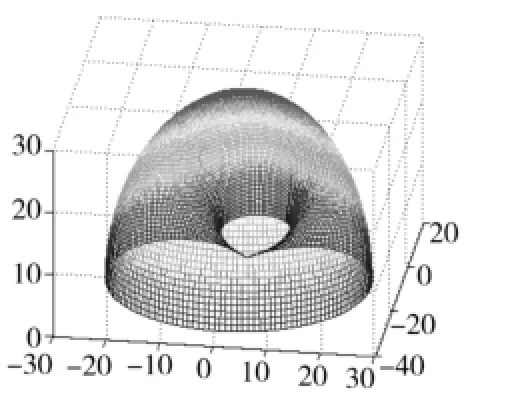
图6 干扰机仰角为0°时雷达探测区仰视图
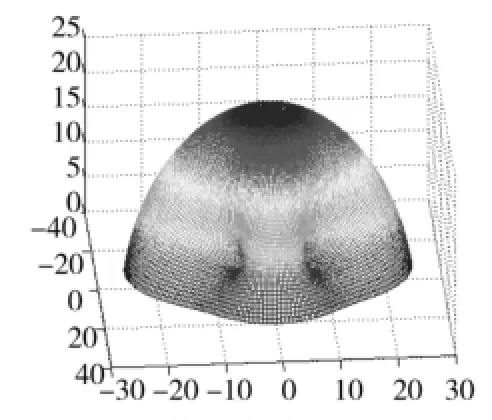
图7 干扰机仰角为30°时雷达探测区正视图
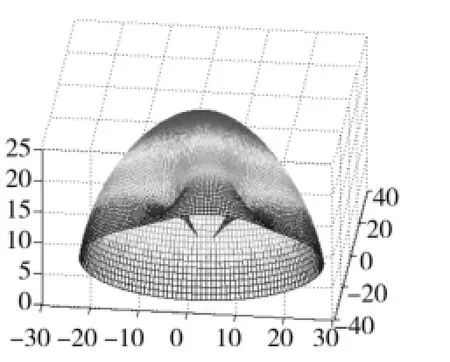
图8 干扰机仰角为30°时雷达探测区仰视图
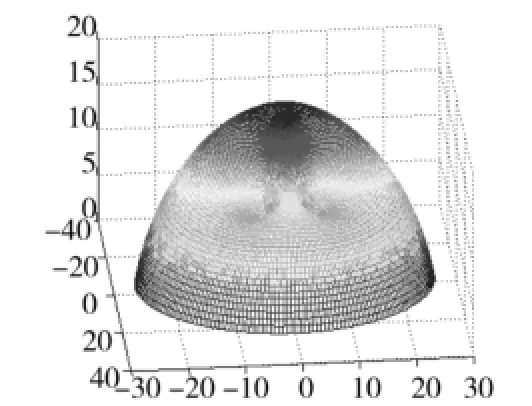
图9 干扰机仰角为60°时雷达探测区正视图
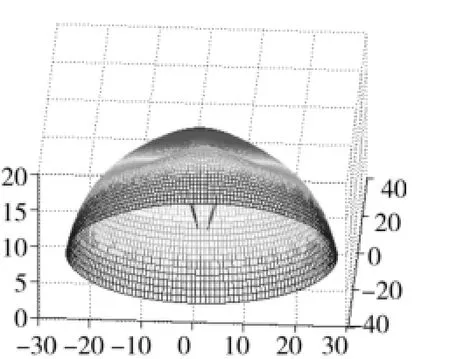
图10 干扰机仰角为60°时雷达探测区仰视图

图11干扰机仰角为90°时雷达探测区正视图
天线正对雷达天线主瓣时,雷达探测距离最小,为固定值,随着干扰机天线和雷达主瓣方向夹角变大,雷达探测距离逐步变大,当夹角大于90°时,探测距离不再变化同样为固定值。当采用分布式干扰时,每个干扰机天线方向都会形成一个圆锥状的凹陷。当干扰机相对于雷达仰角为90°时,在雷达探测区顶部只会形成一个圆锥形凹陷,此时改变干扰机数量和方位角不会对探测区形状有影响。
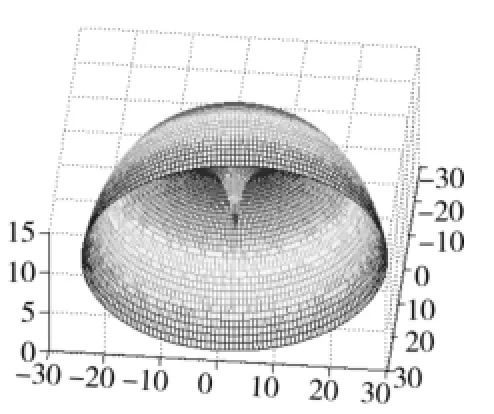
图12 干扰机仰角为90°时雷达探测区仰视图
4 结论
本文建立了分布式干扰条件下雷达探测区三维模型,并对模型进行了仿真计算,根据仿真结果可知,采用分布式干扰时可以有效压缩雷达探测区范围,此外,在不同位置,采用不同干扰机数量进行干扰时,雷达探测区范围也会有相应的变化。仿真结果可以为战场指挥员实施雷达干扰提供决策支持。本文只是基于一种简化的雷达天线方向图进行了建模仿真,对于复杂的雷达空间干扰模型,还需要结合具体的天线方向图,并考虑雷达盲区、大气衰减以及地形等因素的影响,才能较为准确地给出受干扰时的空间探测区,而这也是本文下一步的研究重点。
[1]DARREN J B,ROBIN J E,MORAN B.Game theoretic analysis of adaptive radar jamming[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(2):1081-1100.
[2]张阳,何俊.干扰下雷达三维威力范围可视化研究[J].电子信息对抗技术,2011(6):73-77.
[3]李天顺,李修和,冉金和.复杂电磁环境下雷达探测区域空间建模及仿真[J].指挥控制与仿真,2013,35(2):75-79.
[4]齐峰,刘雅奇,娄宁.一种简化的雷达三维数据生成方法研究[J].计算机仿真,2009,12(3):47-48.
Three-dimensional Modeland Simulation for Radar Detecting Area under Distributed Jamming
LIU Zheng-tang,CHENG Yan-jie,MA Hui
(Luoyang Electronic Equipment Test Center,Luoyang 471000,China)
Firstly,plane model of radar detecting area is built under the condition of distributed jamming.Besides,it is expanded according to the space ubiety of radar,detected aim and jammer.Then the three-dimensional model of radar detecting area under distributed jamming is built.And it is simulated and calculated,thereby displaying radar detection range in all directions under the condition of distributed jamming,which can express decision-making basic for radar networking deployment.
distributed jamming,radar detecting area,three-dimensionalmodel
TN95
A
1002-0640(2016)07-0118-03
2015-06-18
2015-07-16
刘正堂(1985-),男,河南周口人,硕士。研究方向:电子对抗。
猜你喜欢
初中生世界·九年级(2020年2期)2020-04-10
航天电子对抗(2019年4期)2019-12-04
科技创新与应用(2018年2期)2018-01-19
雷达学报(2017年3期)2018-01-19
北京航空航天大学学报(2017年9期)2017-12-18
北京航空航天大学学报(2017年12期)2017-04-23
中国新通信(2017年4期)2017-04-10
军事运筹与系统工程(2016年4期)2016-07-10
科技视界(2016年15期)2016-06-30
现代兵器(2016年6期)2016-06-25