
基于ARM11的自助洗车系统设计*
2016-09-02 13:38周克良刘响响张跃飞江西理工大学电气工程与自动化学院江西赣州34000太原卫星发射中心山西太原03630
传感器与微系统 2016年6期
周克良,刘响响,张跃飞,刘 松(.江西理工大学电气工程与自动化学院,江西赣州34000;.太原卫星发射中心,山西太原03630)
基于ARM11的自助洗车系统设计*
周克良1,刘响响1,张跃飞2,刘松2
(1.江西理工大学电气工程与自动化学院,江西赣州341000;2.太原卫星发射中心,山西太原036301)
设计了一种投币式全自动洗车系统。根据语音提示,客户在完成缴费后,系统便可进入洗车环节。借助现代传感器网络技术,该系统采用非接触式洗车方式。通过光电传感器、接触式传感器采集汽车位置信息。以ARM11为控制核心,根据汽车位置信息控制各机构电机的运转以及各部分功能阀的开启与关闭,从而实现对汽车的清洗。实验表明:系统响应快、清洗效果好、各机构设置简单、节约系统耗材。
便捷洗车;非接触;功能阀;全自动洗车
0 引言
随着人们的生活水平不断地提高,私家车拥有量与日俱增。汽车使用过程中,需要进行定期清洗。由此形成了庞大的洗车[1]市场,但是我国洗车行业发展起步晚,洗车店设备[2]落后于发达国家水平。人工方式的洗车行业逐渐不能满足人们的需求,自动化洗车[3]受到商家和顾客的青睐,目前市场上使用的洗车系统价格昂贵,洗车店占有量少不能满足市场需求。本文设计了全自动投币式洗车系统,拥有良好的控制系统,在保持良好的清洁度时,为客户提供便捷,快速的洗车业务。
1 洗车过程分析与硬件组成
根据需要总过程分为:缴费,底盘清洗,车身预清洗,车身喷涂洗车液,喷洒洗车液,清洗,喷洒打蜡液,车身风干。
系统包含投币部分[4]、龙门架部分、洗刷系统、风干系统。洗车系统组成如图1所示。
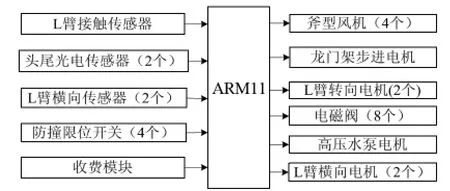
图1 系统控制部分框图Fig 1 Block diagram of system control
2 硬件设计
2.1投币部分设计
采用LCD液晶显示模块,以及语音播报器[5],设置不同等级的洗车选项。使用SK708—S2,SINKO型纸币识别器,工作电压为12VDC,采用串口RS—232工作模式,拥有自动提示LCD显示模块显示所要投币金额,投币部分组成如图2,程序设计如图3。
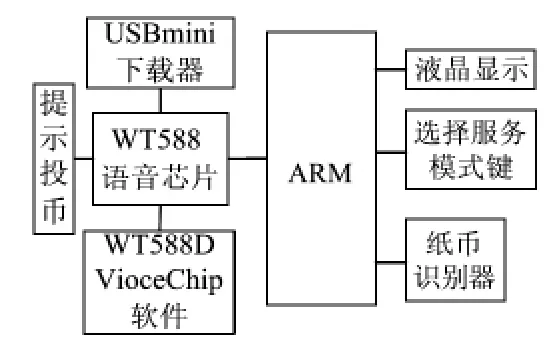
图2 投币系统组成Fig 2 Constitution of coin system
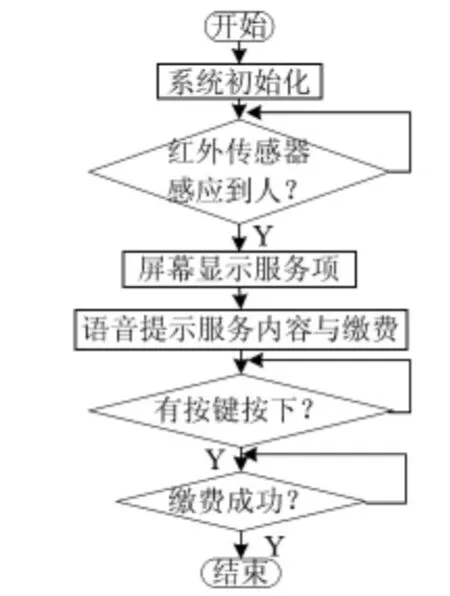
图3 投币程序Fig 3 Coin program
2.2龙门架部分
龙门架两侧安装M30光电传感器。当汽车进入洗车房指定区域后,控制龙门架的电机[6]开始工作,龙门架快速移动寻找汽车,当龙门架两臂上对照式传感器被汽车头部挡住时,汽车清洗机构工作,在龙门架移动到汽车后端时,电机拖动龙门架向后运动,传感器再次检测到汽车时,清洗部分再次工作。龙门架与悬挂的轨道[7]采用齿轮黏合,3#和4#齿轮安装在同轴电机,驱动电机轴上的齿轮与轨道齿口咬合连接,保证龙门架移动精确,减少移动距离上的误差。为防止龙门架在来回移动过程中出现误差撞击两端部件,在龙门架轨道前后设置两对限位开关。龙门架[8]与L杆结构位置如图4。
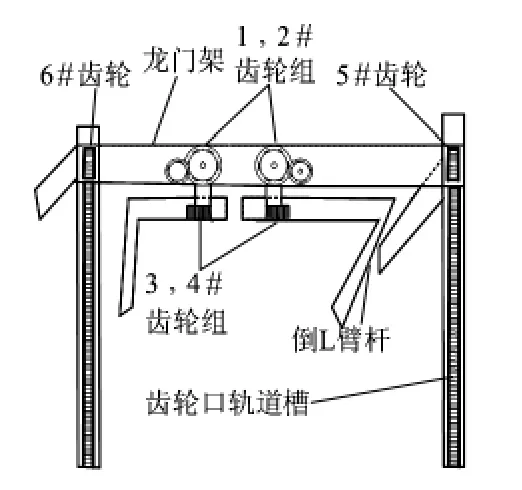
图4 洗车系统主要硬件布局Fig 4 Major hardware layout of car-washing system
根据车身长度龙门电机控制曲线图(实验根据奥迪A6L,5015×1874×1455 mm设定)
如图5,龙门架在电机的驱动下由汽车的前端开始移动接近汽车,阶段1为龙门电机驱动龙门架从车头到车尾部移动的速度和位移,该阶段完成对车辆的预清洗喷水过程;阶段2为龙门电机驱动龙门架由车尾移动到车头完成喷洒洗车液过程;阶段3为龙门架电机驱动龙门架由车头到车尾,此次完成喷水清洗过程;阶段4为龙门架电机由车尾再次返回到车头,完成风干过程。
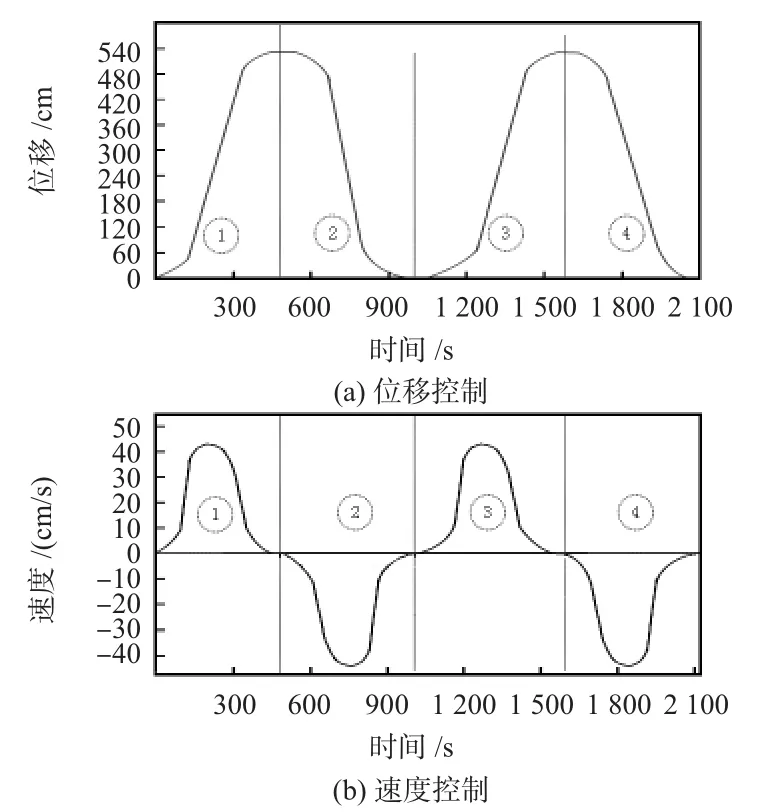
图5 龙门电机控制曲线Fig 5 Motor control curve of gantry crane
2.3洗刷部分硬件设计
2.3.1底盘清洗
洗车房入口处距离地面50 cm墙面上安装2组对照式激光传感器,并在地面上设置2排喷水孔。车辆进入洗车房时,墙壁上传感器检测到车辆后,高压喷头立刻开启,向车底喷水冲刷底盘。
2.3.2车身清洗部分
清洗结构形状设计成倒立弯曲“L”,当龙门架传感器检测到汽车时,L形清洗臂在1#横向齿轮组的驱动下向车身靠近,L臂上的激光传感器检测车身与L臂间距,距离靠近达到20 cm,L臂保持静止,龙门架沿纵向移动。龙门架上对照式传感器移出车身位置时,龙门架停止移动,L清洗臂顶端电机驱动转向齿轮转动推动L臂杆缓慢旋转对车尾清洗。完成尾部清洗时,L臂回转,龙门架向回移动,当龙门架移出车头部位时L臂杆在横向电机的推动下转动对车头部分清洗。L臂杆内装有高压出水管束,出水口间距10cm,在高压水泵的驱动下完成喷水过程。当L臂杆距离检测完成时由控制中心发送信号给继电器启动高压泵。洗车液通过L臂杆,在高压泵进水管道前端安装进水阀门,使用清洗液清洗时,关闭进水管道阀门。同时设计独立的出液管,在管口添加雾化喷液口。可控工作压力在3.5~6kg。
2.3.3阀门选型与控制
系统使用电磁阀8个,洗车液进液阀1个,进水阀1个;底喷出水阀3个,L臂出水阀3个。均采用重庆盾铭电磁阀有限公司生产的交流220V ZC51-3GB常闭型液用电磁阀。电磁阀原理:当线圈通电时,先导阀芯吸合,先导孔
打开,阀上腔卸压,活塞靠下腔介质压力推动,电磁阀打开;当线圈断电时,先导阀芯靠弹簧复位,先导孔关闭,阀上腔由活塞节流孔增压和复位弹簧的推力,电磁阀关闭。系统电磁阀经常启停,采用ARM与继电器控制电磁阀。
2.3.4电机与高压泵选型部分
L臂横向控制电机与L臂转向电机采用雷赛86型号步进电机[9],在传感器检测信号传输给ARM芯片后,ARM发送信号至L臂横向步进电机,L臂旋转步进电机。使用超高压水泵一台,由三项异步电机驱动,选用霍克(Hawk)XXT5520型高压泵轮流支配L臂出水口30个,两个L臂杆各15个,底盘清洗口[10]20个。
2.3.5风干系统
当完成对汽车的清洗后,斧型风干机在龙门架顶端由车头部分向车尾部分移动,到达尾端后停留在车尾部,在洗车房进口处左右两侧的4个固定式斧型风干机在传感器检测到车身时即开始工作。风干机采用KT100型风机(扇)。
3 系统软件
系统建立在ARM平台上运行,使用C语言编程,控制各类传感器和各部分驱动电机的运行状态。流程如图6。
4 结论
测试表明:系统整体运行平稳,各部分机构响应迅速,整个洗车过程耗时少,稳定性高;采用非接触式洗车方式设计安全度高,避免了接触式仿形洗车方式在清洗过程中出现的过度擦碰,灵敏的传感网络加强了系统的感知,在无人条件下自动完成收费,清洗,节约人力,降低了造价成本。同时设计也为系统升级留有足够的空间。
[1]Yu Y,Kurnianggoro L,Jo K H.Design of intelligent car washing system[C]∥2015 The 54th Annual Conference of the Society of Instrument and Control Engineers of Japan(SICE),IEEE,2015:1447-1450.
[2]李培丽.节能便携式洗车机的研制[D].呼和浩特:内蒙古工业大学,2010.
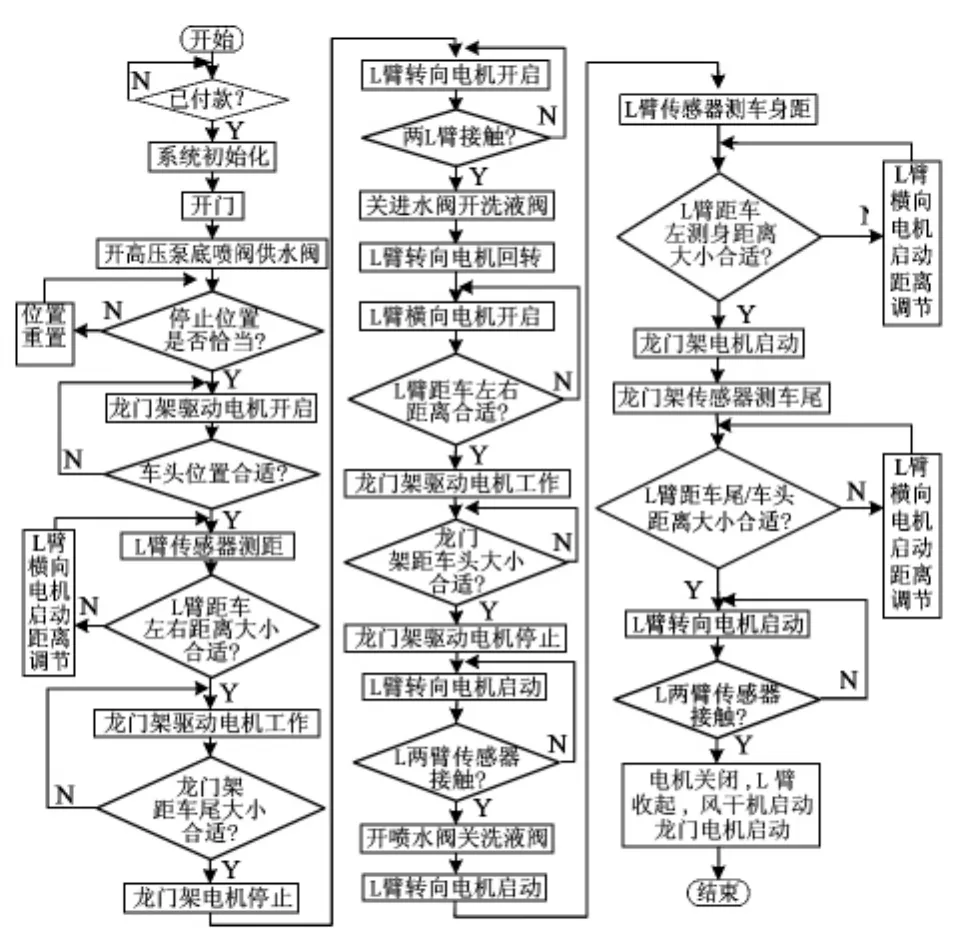
图6 洗车流程软件设计流程图Fig 6 Flow chart of software design of car-washing process
[3]韩晓成.智能洗车控制系统设计与研究[D].沈阳:东北大学,2011.
[4]邓娜娜,王鹏,杨子姜.基于ARM的自动售货机主控制器的设计与开发[J].计算机应用与软件,2015,41(8):66-70.
[5]鲍润华.火车站信号自动语音播报系统的设计[J].现代电子技术,2009,38(14):156-161.
[6]吴健,余真,陈秀琴,等.三相异步电机型式试验台电源与加载系统[J].电气传动,2014(5):75-77.
[7]王维,杨秀俊.高速立式加工中心主轴轴承油气润滑设计[J].制造技术与机床,2015(3):60-62.
[8]陈宝江,葛田子,王建治.一种包装机械手及其控制的研究[J].包装工程,2014(7):90-94.
[9]刘大洋,赵伟,杨恒.大型起重机械在线监测的无线传感器网络节点设计[J].传感器与微系统,2015,34(9):76-79.
[10]李勇俊,张胜昌,段飞,等.面向大流量应用的硅微阀致动器优化设计[J].传感器与微系统,2015,34(9):80-82,86.
为过程控制与应用,嵌入式技术等。
刘响响,通讯作者,E—mail:1308685570@qq.com。
Research and design of self-service car-washing system based on ARM11*
ZHOU Ke-liang1,LIU Xiang-xiang1,ZHANG Yue-fei2,LIU Song2
(1.School of Electrical Engineering and Automation,Jiangxi University of Science and Technology,Ganzhou 341000,China;
2.Taiyuan Satellite Launching Center,Taiyuan 036301,China)
Design a coin automatic car-washing system.According to voice prompts,after customer completes payment,the system goes into the car-washing mode.Based on modern sensor network technology,the system uses non-contact car-washing way.Through photoelectric sensor and contact sensor,collect vehicle position information. The ARM11 is used as control core,according to vehicle position information,control operation of motor,and open and close of each part of functional valve,so as to realize car-cleaning.Experimental result shows that the system responds quickly,cleaning effect is good,setting of each mechanism is simple and save material cost.
convenient car-washing;non-contact;functional valve;automatic car-washing
TP277
A
1000—9787(2016)06—0107—02
10.13873/J.1000—9787(2016)06—0107—02
2016—03—21
国家自然科学基金资助项目(61363011)
周克良(1963-),男,江西赣州人,硕士,教授,主要研究方向
猜你喜欢
汽车维修与保养(2021年8期)2021-02-16
小学生学习指导(高年级)(2020年12期)2020-12-15
工程与试验(2020年1期)2020-06-18
环球时报(2019-03-27)2019-03-27
做人与处世(2018年24期)2018-02-12
发明与创新·小学生(2016年8期)2016-08-17
消费电子(2016年8期)2016-05-14
启迪与智慧·教育版(2016年2期)2016-04-05
重型机械(2014年2期)2014-05-31
小猕猴学习画刊(2013年1期)2013-03-19
