
漂移扫描CCD星图的星点目标快速提取
2016-10-13 19:33杨会玲柳红岩孙慧婷
光电工程 2016年4期
杨会玲,柳红岩,王 军,孙慧婷,何 昕
漂移扫描CCD星图的星点目标快速提取
杨会玲1,2,柳红岩1,王 军1,孙慧婷1,何 昕2
( 1. 苏州科技学院电子与信息工程学院,江苏苏州 215000;2. 中国科学院长春光学精密机械与物理研究所,长春 130033 )
在实时同步卫星定轨系统中,为了提高漂移扫描CCD星图目标提取的实时性,提出最简特征融合算法。通过星图背景分割减少噪声影响,提取局部灰度最大值与局部区域对比度作为星点目标特征,通过选取最佳权值融合上述两种特征,突显星点目标。与传统的星点提取算法相比,所选取的两种特征容易提取,运算量小,节省星点目标提取时间,提高了星点提取精度。通过对分辨力为1 528×1 528的漂移扫描CCD星图进行处理,实验结果证明了该算法的有效性。
漂移扫描CCD;背景分割;特征融合;星点提取
0 引 言
在获取同步卫星位置信息时,通常利用恒星定位归算同步卫星轨道的方法。在提取恒星目标与同步卫星目标时,星象形状为圆形则更易提取,但是,由于同步卫星与恒星背景之间有相对运动,所以若只对恒星作凝视观测,难以同时获取两者良好圆星象,为了克服这一技术缺陷,提出了天文望远镜CCD漂移扫描工作模式。其工作原理为TDI模式与凝视模式交替观测恒星与同步卫星。TDI模式下的星图恒星表现为拖长星象,卫星表现为圆星象;凝视模式卫星拖长,恒星为圆星象。
对恒星目标的提取是同步卫星定位中重要的基础性工作,许多学者对此做出大量的研究,文献[1]提出连通分析算法,即扫描星图,储存大于阈值属于星点目标的像元,分析像素灰度值特点及其坐标之间的关系,建立有效星点的外接矩形。文献[2]提出基于边缘检测的星点提取方法,即扫描星点区域边缘像素,利用边缘像素确定星点区域。文献[3]提出静态视框法提取星点目标,即选取合适大小的视框,通过在图像中移动视框来搜索目标,在提取过程中只判断视框中的星点像素。在静态视框的基础上文献[4]提出动态视框法,即选取比星点目标小的视框,通过移动视框确定星点中心像素,以中心像素为中心,根据星点目标像素分布自适应选取不同大小的外接视框。
上述方法能够提取星点,但在实时同步卫星定轨系统中,需要快速提取星象,实现恒星的快速定位,上述方法难以满足实时处理要求。为克服这一不足之处,本文提出一种星点快速提取算法,即利用自适应最简特征融合方法来提取星点目标。特征融合多用于目标跟踪与图像分类等设计中,传统的特征融合主要过程为提取目标局部特征,例如颜色、纹理、边缘、运动等特征,对提取的特征加权求和,以达到区分或跟踪目标的目的[5]。对于漂移扫描CCD星图,其背景结构简单,无需提取复杂的局部特征,虽然会受光照不均匀或薄云、月光的影响而表现出背景灰度不均匀,但这种不均匀性利用简单的多项式拟合即可改善[6]。最简特征融合方法在传统的特征融合的基础上,提取局部灰度最大值与局部区域对比度两种特征,两种特征运算简单,能够减少星点提取时间,提高星点提取鲁棒性。
1 星图背景分割
提取星点目标之前,首先要对星图背景与星点目标进行分割,常用的背景分割方法为阈值法。在实时同步卫星定轨系统中,背景分割之前已对背景进行多项式拟合处理,背景像素均匀分布,所以在此可以利用全局阈值法分割背景。设为背景分割之后位置像元的灰度值,为其背景分割前的灰度值,为全局阈值,则背景分割公式为[7]
阈值的选取非常重要,常用的全局阈值计算方法为基于统计的全局阈值算法与Otsu算法,基于统计的全局阈值算法运算量小,耗时短,但对于漂移扫描CCD星图,处理效果不佳,易受噪声影响;Otsu算法可有效分割星图背景,抗噪声性强,但运算耗时较长,是基于统计的全局阈值算法运算时间的10倍。
为了保证有效性的同时减少耗时,在实时同步卫星定位系统中,利用加权迭代阈值算法计算阈值,该算法不但能够有效分割星图背景,而且处理时间短,仅为Otsu算法运算耗时的1/8。
加权迭代阈值算法引入加权迭代因子,可根据需要探测的星点数目或星点质心探测的精度要求,确定加权因子的取值,得出最佳分割阈值,最佳分割阈值能够完整的保留星点目标所有像元,提高星点质心的计算精度。其计算式为
重复迭代上述三式,直到满足,迭代结束,得到最佳阈值。其中为灰度值大于前阈值的像素个数,为灰度值小于的像素个数,为像素点的灰度值,和分别为其相应的灰度平均值。在加权迭代之前要先引入一个初始值,,其中为最大灰度值,为最小灰度值。


图1 背景多项式拟合后的星图

图2 加权迭代阈值分割法背景分割后的星图
2 最简特征融合
2.1 特征提取
从图2可以看出,背景像素已赋值为0,星点目标在其背景中比较明显,所以对于图2所示星图,可以提取到的特征为:局部灰度最大值、局部区域对比度、局部熵、局部平均梯度等[8]。为减少计算量,缩小计算时间,选取运算量最小的局部灰度最大值与局部区域对比度作为提取特征。
局部灰度最大值表示为

设局部区域为,式中表示为中坐标为处的像素的灰度值。局部区域仅包含一个星点目标,漂移扫描CCD星图中星点目标最大不超过10×10,所以局部区域的大小设定为10×10。
局部区域对比度表示为

式中:为局部区域所有像素个数,为略大于局部区域的星点目标背景区域,大小设定为15×15,为的所有像素个数,为中坐标为的像素灰度值。
2.2 特征融合
设每个星点目标的特征向量为,对特征向量中的每个元素进行特征融合。特征融合式为
有限元计算模型如图1所示。该模型沿11号线纵向长度为110.0 m,横向延伸长度为100.0 m,高度为60.0 m。模型共132 008个单元、138 118个节点。
权值的取值非常重要,它决定了特征融合的稳定性,权值越大,则此特征对于星点目标提取的贡献越大,权值满足,权值分布越均匀,则说明该特征在目标提取中的可靠性越低。
在计算权值之前需要对各个目标的特征进行归一化,归一化之后的特征才可以进行加权融合,例如对于局部灰度最大值特征,其归一化公式为

其中:为所有目标局部灰度最大值的特征集的平均值,为其方差,其计算公式分别为:,,表示第颗星点目标的局部灰度最大值特征,为星图分辨率。所以,最终的特征融合为
权值的计算可以通过方差来推导[9],例如对于局部灰度平均值,其方差为

对权重进行归一化得最终权重值为

图3显示了一个星点目标以及其周围的背景,图4为在MATLAB环境下生成的特征融合之后目标检测的效果图,图5为图2所示星图特征融合之后目标检测效果图。从图4与图5可以看出,特征融合之后的目标相对于背景明显突显。

图3 有一颗星点目标的局部星图
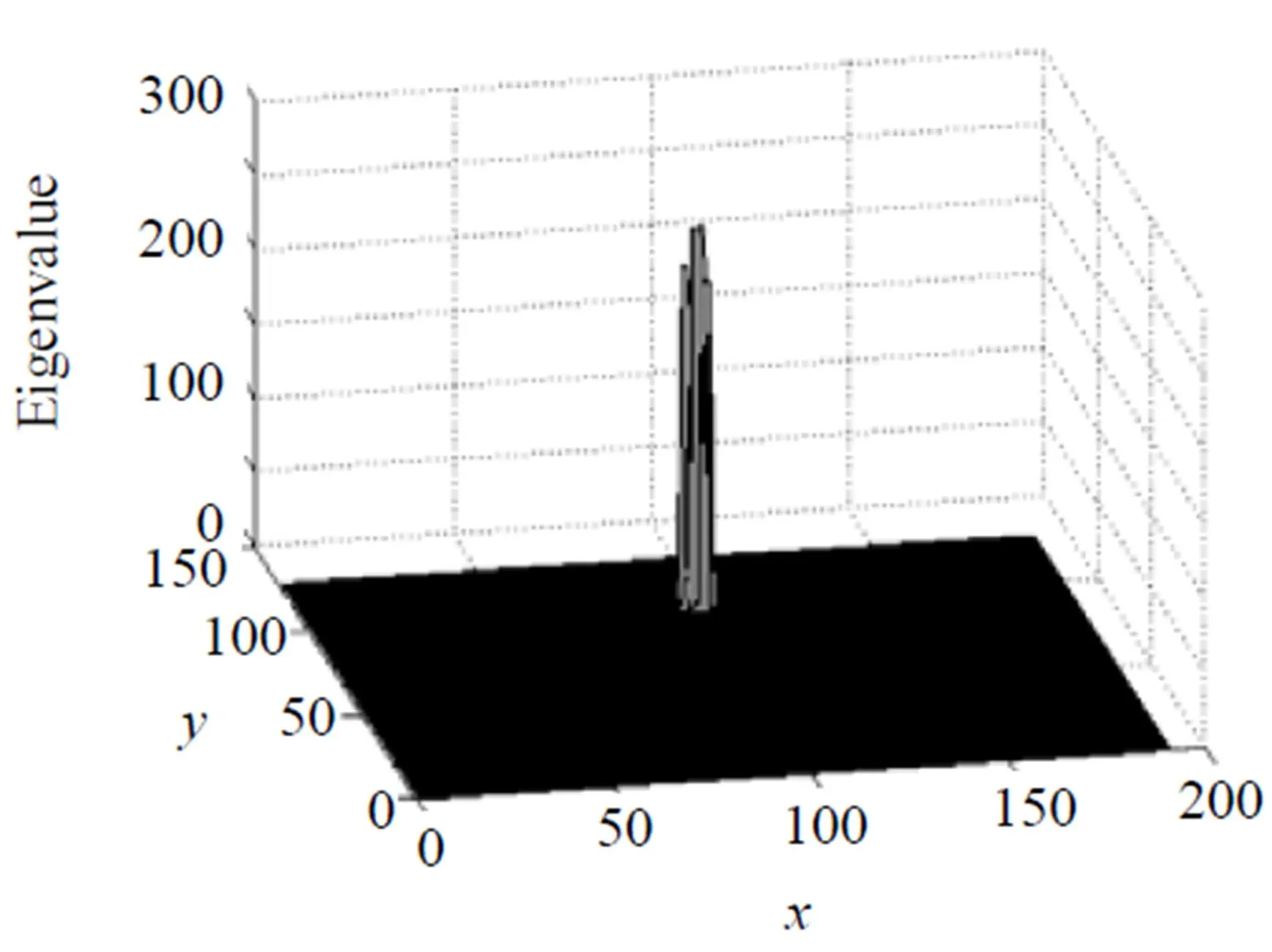
图4 图3 特征融合之后的目标检测效果图

图5 图2 所示星图特征融合之后目标检测效果图
3 实验结果与分析
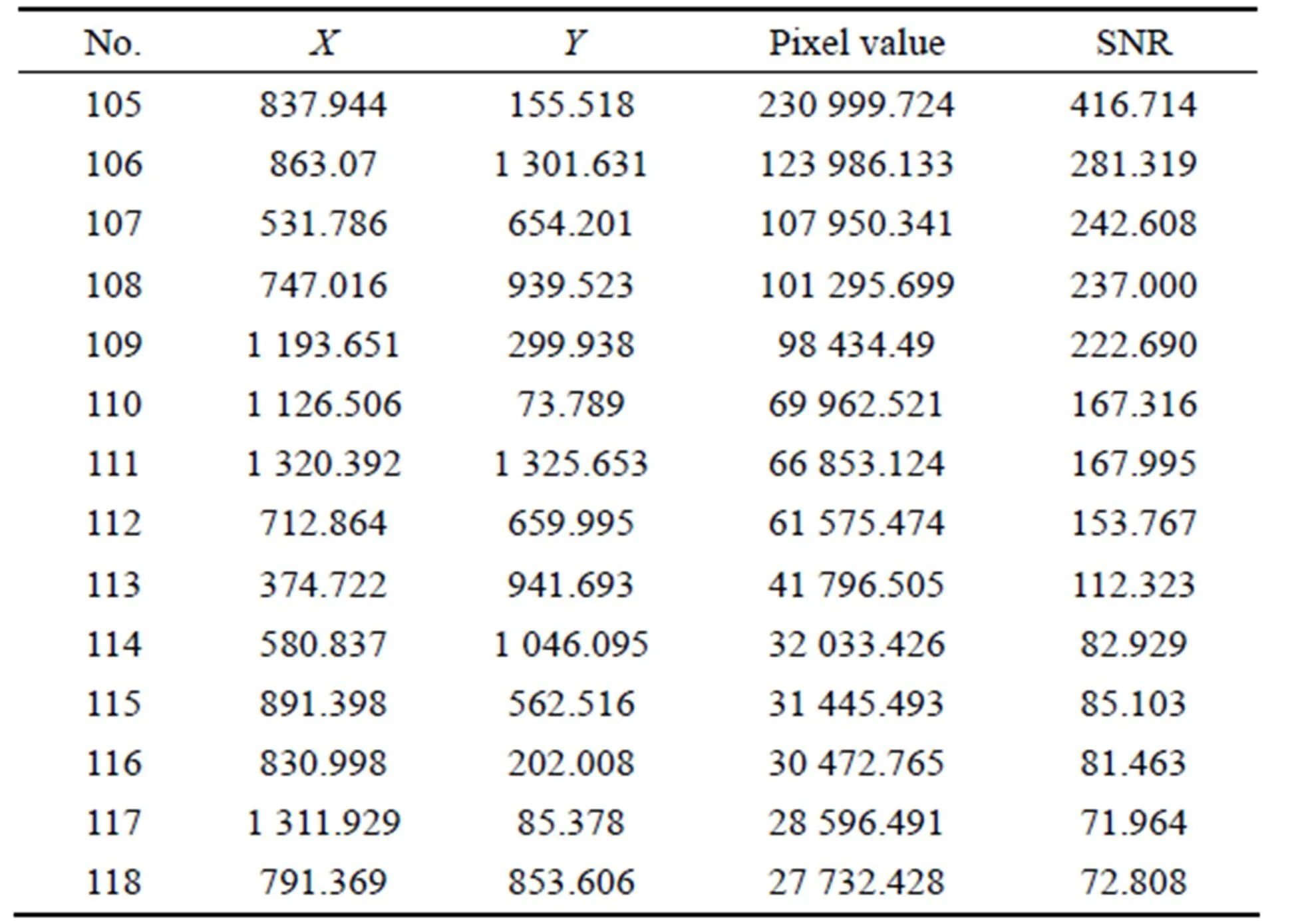
为了验证算法的有效性,利用此算法对图6所示星图进行处理,并将最终的星点目标提取结果写入文件,星图的分辨率为1 528×1 528,每个像素由12位表示,星图最终提取出的星点目标数为351颗,其部分星点目标提取结果如表1所示。
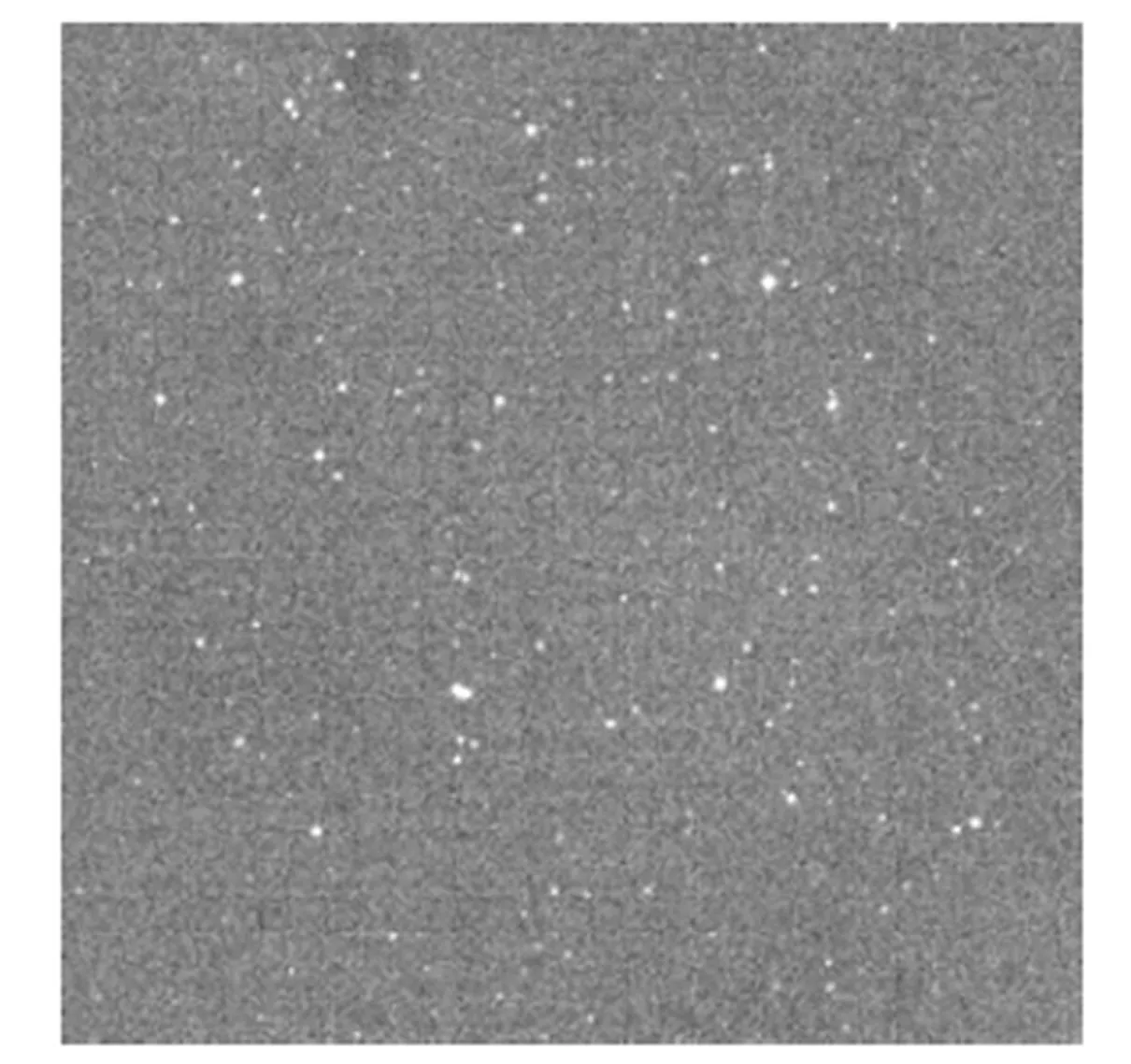
图6 漂移扫描CCD 凝视模式星图
表1 图6 所示星图部分星点目标提取结果
Table 1 Partial star extraction results of fig.6
利用同步卫星实时定轨系统对同一同步卫星目标进行6 h跟踪拍摄,随机抽取100幅漂移扫描CCD凝视模式下拍摄的星图,分别用边缘像素搜索算法、动态视框搜索算法、四特征融合算法与最简特征融合算法对星图进行处理,星图中恒星为圆星象,卫星拖长,每幅星图中星等亮度大于12的恒星目标不超过400颗。天文望远镜的视场角为0.5°×0.5°,软件的开发平台为Microsoft Visual Studio 2012,运行环境为Win 7,硬件配置为Intel Core i7,4 GB内存,分别比较其处理时间、星点、坐标误差均值与星点提取率。
图7为星点坐标误差的计算原理[10],点为镜头,轴为CCD成像平面,设为星点提取算法所得的计算位置,为星点真实位置,误差。的计算方法为:设为角度测量的起始线,为一标定点,其测量角为,真实值的测量角为,真实值,其中为焦距,与可利用自准直仪等角度测量设备得到。类似可计算坐标误差均值。
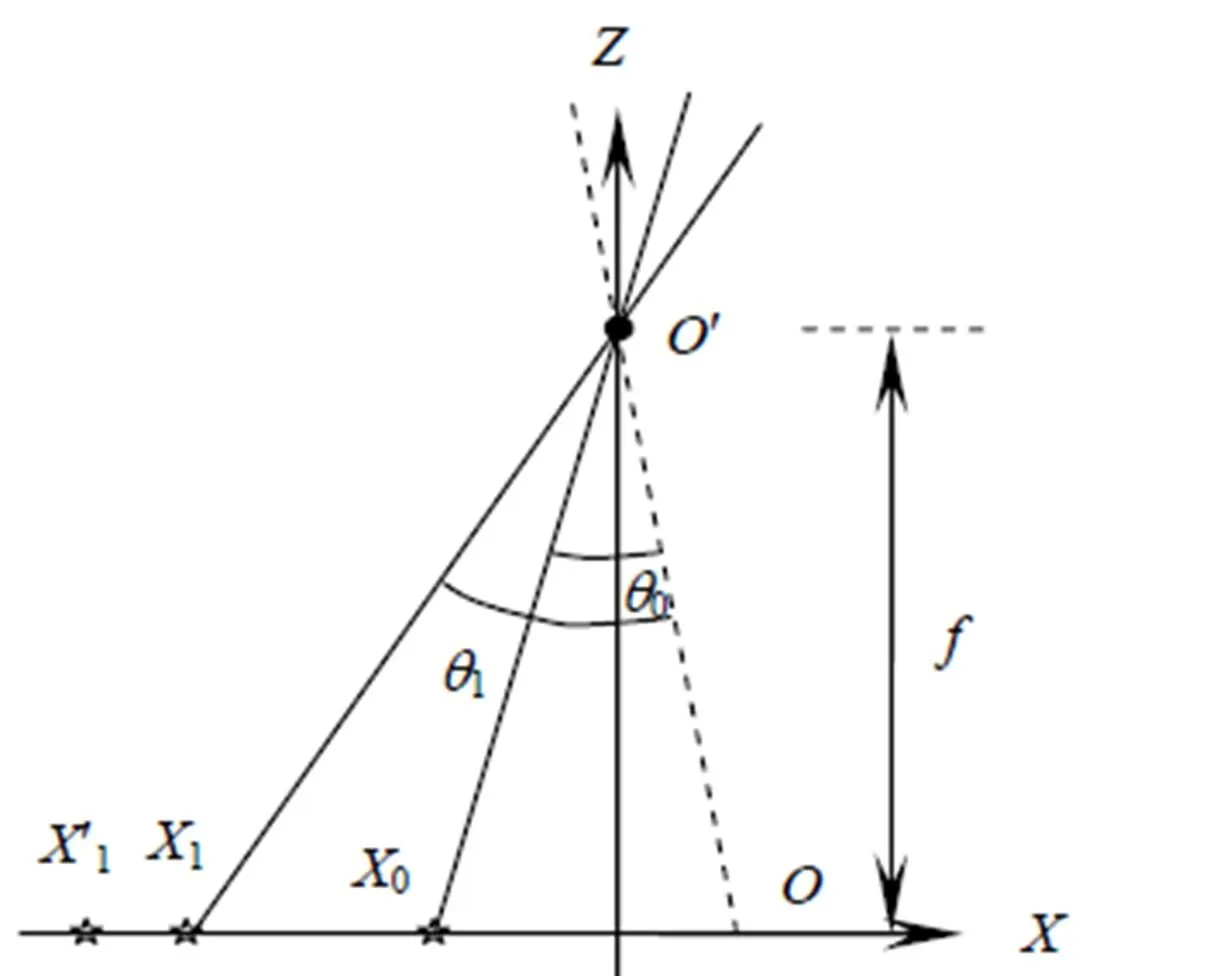
图7 X 轴星点提取误差的计算原理
星点提取率计算方法为真实恒星数除以提取出的目标总数。真实恒星的判断可通过将所提取出的目标与CCD星图所在天区的子星表中的参考星相匹配,若匹配成功则为真实恒星目标,反之为噪声点。
表2为四种星点目标提取算法的比较结果,从表中可以得出,在相同条件下,提取相同数量的星点目标,最简特征融合算法所耗时间最少并且所得质心的坐标精度最高。
表 2 四种提取算法比较
产业在线监测数据显示:2018年10月微波炉行业总产量607.4万台,同比增长3.1个百分点;总销量609.8万台,同比增长2.4个百分点。其中,内销出货106.3万台,同比下滑4.8个百分点;出口出货503.5万台,同比增长4.1个百分点。
Table 2 Comparison of four extraction method
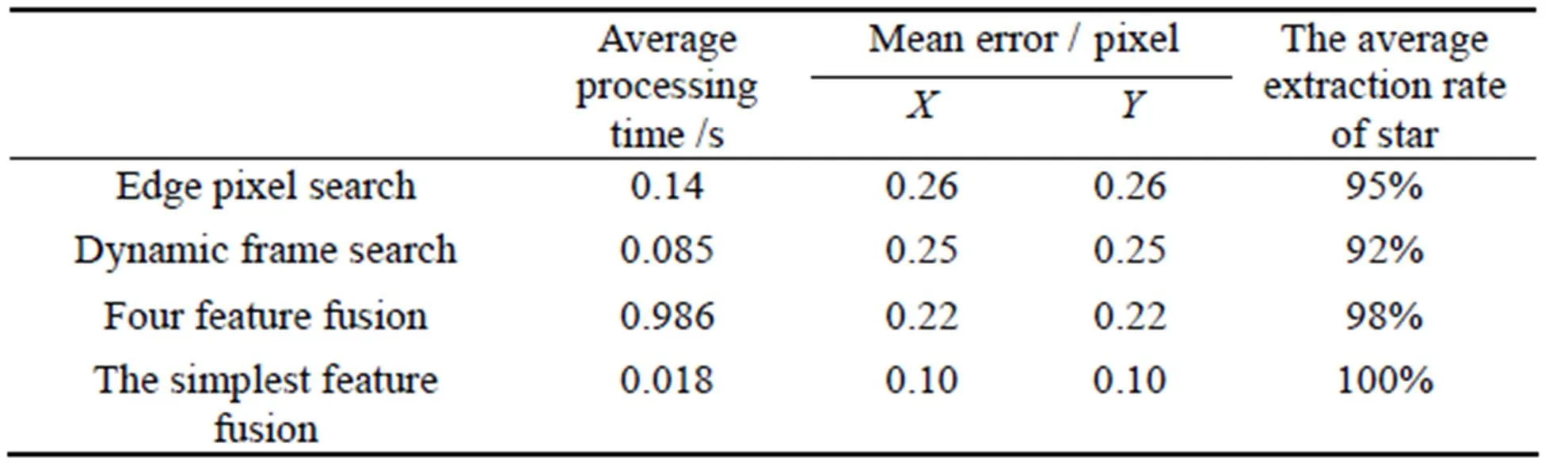
四特征融合所用的特征为颜色、局部灰度最大值、局部变化量与纹理[11],通过多帧积累检测目标,四特征融合没有考虑到不同特征对目标提取的贡献程度,多帧积累时间较长,实时性差,所以四特征融合算法耗时最长,最简特征融合只需检测单帧即可提取星点目标,耗时最短,具有很好的实时性。相比于基于边缘像素搜索算法与动态视框搜索算法,最简特征融合更能突显目标,鲁棒性更好。
4 结 论
本文针对漂移扫描CCD星图提出最简特征融合法提取星点目标,利用加权迭代阈值算法分割星点目标与背景像素,提取局部灰度最大值与局部区域对比度两种特征,融合这两种特征,突显并提取星点目标。实验结果表明,在实时同步卫星定位系统中,与基于边缘像素搜索算法、动态视框搜索算法、四特征融合算法相比,此方法在保证高提取精度的基础上节省了提取时间,具有很好的实时性和稳定性,适合星图的实时处理,在实时同步卫星定轨系统中取得了成功的应用。
[1] 李德良,阮锦. 一种适于星敏感器的星点提取方法 [J]. 激光与红外,2009,39(12):1348-1350.
LI Deliang,RUAN Jin. Method adapting to the star sensor’s star extraction [J]. Laser & Infrared,2009,39(12):1348-1350.
[2] 赵宏伟,陈霄,刘萍萍,等. 视觉显著目标的自适分割 [J]. 光学精密工程,2013,21(2):531-538.
ZHAO Hongwei,CHEN Xiao,LIU Pingping,. Adaptive segmentation for visual salient object [J]. Optics and Precision Engineering,2013,21(2):531-538.
[3] 原玉磊,席靓,张文郎. 星点图像的目标提取算法研究 [J]. 海军航空工程学院学报,2010,25(6):649-652.
YUAN Yulei,XI Liang,ZHANG Wenlang. Research on Star Extraction Algorithm from Star Images [J]. Journal of Naval Aeronautical and Astronautical University,2010,25(6):649-652.
[4] 陶雨露,邓新蒲,程洪玮. 基于动态框搜索的星图中星点获取算法研究 [J]. 航天电子对抗,2012,28(5):34-37.
TAO Yulu,DENG Xinpu,CHENG Hongwei. Research on star acquisition method based on dynamic box [J]. Aerospace Electronic Warfare,2012,28(5):34-37.
[5] 郇二洋,李睿. 基于自适应特征融合的粒子滤波目标跟踪算法 [J]. 计算机科学,2015,42(2):316-319.
HUAN Eryang,LI Rui. Particle Filter Object Tracking Based on Adaptive Feature Fusion [J]. Computer Science,2015,42(2):316-319.
[6] 于涌,李岩,毛银盾,等. 空间碎片激光测距与光学测角一体化观测实验 [J]. 天文研究与技术,2013,10(4):359-364.
YU Yong,LI Yan,MAO Yindun,. Expermental Observations of Space DebrisIntegrating Laser Ranging and Optical Direction Measurement [J]. Astronomical Research and Technology,2013,10(4):359-364.
[7] KIM D S,LEE K H. Segment-based region of interest generation for pedestrian detection in far-infrared images [J]. Infrared Physics & Technology(S1350-4495),2013,61(3):120-128.
[8] 赵谦,周勇,曾召华,等. 基于多准则特多特征融合的自适应跟踪算法 [J]. 计算机应用,2013,33(9):2584-2587.
ZHAO Qian,ZHOU Yong,ZENG Zhaohua,. Adaptive tracking algorithm based on multi-criteria feature fusion [J]. Journal of Computer Applications,2013,33(9):2584-2587.
[9] 孙俊,何发智,陈晓,等. 多特征提取逐步求精的高速移动目标跟踪算法 [J]. 计算机辅助设计与图形学学报,2014,26(10):1747-1752.
SUN Jun,HE Fazhi,CHEN Xiao,. Multi-feature Extraction and Stepwise Refinement Based on High-speed Moving Target Tracking Algorithm [J]. Journal of Computer-Aided Design & Computer Graphics,2014,26(10):1747-1752.
[10] 李平,魏仲慧,何昕,等. 采用多特征融合的多视点目标识别 [J]. 光学精密工程,2014,22(12):3368-3376.
LI Ping,WEI Zhonghui,HE Xin,. Object recognition based on shape feature fusion under multi-views [J]. Optics and Precision Engineering,2014,22(12):3368-3376.
[11] SUMANTRA Dutta Roy,KAVITA Bhardwaj,RHISHABHR Garg,. Camera-based document image matching using multi-feature probabilistic information fusion [J]. Pattern Recognition Letters(S0167-8655),2015,58(1):42-50.
Rapid Star Extraction from Star Image Taken by Drift-scan CCD
YANG Huiling1,2,LIU Hongyan1,WANG Jun1,SUN Huiting1,HE Xin2
( 1. Electronic and Information Engineering Faculty, Science and Technology University of Suzhou, Suzhou 215000, Jiangsu Province, China;2. Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Science, Changchun 130033, China )
In the system of real-time orbit determination of synchronous satellite, an algorithm based on simple features fusion is proposed to reduce the consuming time on star extraction from star image of CCD drift-scan. Firstly, segment star targets and background to decrease the influence of noise and improve the contrast of star image. Then, compute part maximum pixel gray value and mean contrast of partial region as star target feature and fuse the features, by counting optimum weights, to make the star target be sharper. The precision of star extraction is higher than traditional star extraction method. The amount of calculation of the algorithm which can be easily fulfilled is small, star extraction time is saved and the accuracy of star extraction is improved. The experiment results of processing the star image whose resolution is 1 528×1 528 taken by drift-scan CCD proves the validity of the algorithm.
drift-scan CCD; background segmentation; feature fusion; star extraction
TP202
A
10.3969/j.issn.1003-501X.2016.04.003
2015-04-01;
2015-06-18
国家自然基金项目(61472267);上海市自然科学基金(Y256501001);江苏省普通高校研究生科研创新计划项目(KYLX15_1311)
杨会玲(1976-),女(汉族),河南开封人。讲师,硕士,主要研究工作是光电测控技术与数字图像处理。E-mail:281109685@qq.com。
柳红岩(1990-),女(汉族),山西晋中人。硕士研究生,主要研究工作是数字图像处理。E-mail:522096420@qq.com。
猜你喜欢
军事文摘(2022年12期)2022-07-13
北京航空航天大学学报(2022年6期)2022-07-02
数学物理学报(2022年1期)2022-03-16
天津医科大学学报(2021年1期)2021-01-26
综艺报(2019年15期)2019-08-16
现代装饰(2019年7期)2019-07-25
自动化学报(2017年5期)2017-05-14
中成药(2016年8期)2016-05-17
中成药(2016年4期)2016-05-17
浙江理工大学学报(自然科学版)(2015年7期)2015-03-01
