
通过空间系绳系统返回载荷到地面的误差分析
2016-10-29 02:11徐小野伊始克夫谢尔盖法捷严科夫巴维尔王长青
西北工业大学学报 2016年2期
徐小野,伊始克夫·谢尔盖,法捷严科夫·巴维尔,王长青
(1.萨马拉国立航空航天大学飞行器学院,俄罗斯萨马拉 443086;2.西北工业大学自动化学院,陕西西安 710072)
通过空间系绳系统返回载荷到地面的误差分析
徐小野1,2,伊始克夫·谢尔盖1,法捷严科夫·巴维尔1,王长青2
(1.萨马拉国立航空航天大学飞行器学院,俄罗斯萨马拉 443086;2.西北工业大学自动化学院,陕西西安 710072)
分析了利用空间系绳系统返回载荷到地面目标点的过程中,由于展开过程中有可能的误差导致着陆点的偏差。首先给出了从系绳展开、自由摆动、切断系绳后进入低轨道,最终进入大气层到落到地面整个过程模型和计算过程;通过载荷整个运动过程中的数据给出星下点轨迹,并给出在没有任何误差情况下,使载荷着陆到目标点上所需要的开始释放系绳的轨道位置;在以上结果的基础上,最后给出当轨道高度、轨道偏心率或者剪断系绳的时机出现一定误差的情况下,载荷返回到地面的偏差范围。
高度控制;计算;计算机仿真控制;动力学;误差分析;数学模型;最优化;轨道;参数化;系绳;轨迹;速率;轨道高度;轨道偏心率;返回载荷;空间系绳;剪断时刻
系绳卫星系统是指由2颗或者2颗以上的卫星通过系绳连接在一起运动的系统,近30年来,国内外都进行了大量的理论研究和空间实验。美国和意大利在1992年共同研制了TSS-1系统,该系统在轨完成了大量电动力系绳研究[1]。美国NASA于1993年研制的SEDS-1,验证了简单轻型的绳系展开机构以及系绳展开动力学和系绳释放后卫星脱离运行轨道和再入返回的能力[2]。1998年实施的ATEx实验,验证了绳系系统的稳定性、可控性,以及子星姿态的确定与控制问题[3]。最近的一次太空实验是于2007年9月由欧洲航天局教育办公室发起,在俄罗斯飞船“光子-M3”上进行的“年轻工程师卫星2号YES2”实验展开了31 km的系绳,成为太空中最长的人造物体,该实验的目的是验证依靠系绳系统展开从轨道上返回小返回舱的任务,只是YES2实验由于展开过程中的错误信号,导致系绳被提前剪断,最终小返回舱没有返回到地面的指定范围内,至今没有找到[4-6]。本文的研究内容主要针对像YES2展开过程中出现的问题,分析利用空间系绳系统返回载荷到地面目标点的过程中,由于展开过程中误差导致的着陆点的偏差。
本文首先给出空间系绳系统从展开、摆动、切断系绳后进入低轨道到进入大气层整个过程的模型和计算过程;通过整个展开释放过程的数据建立星下点轨迹,并给出展开系绳的初始位置,以使小返回舱能够到达指定地面上的地点;最后在标准展开程序下,当存在轨道高度、轨道偏心率以及剪断系绳的时机出现一定误差的情况下,计算小返回舱返回到地面的偏差情况。
1 空间系绳系统的数学模型
航天飞行器(空间站)相对于子卫星(载荷)重心相对位置在球星坐标系中如图1所示:
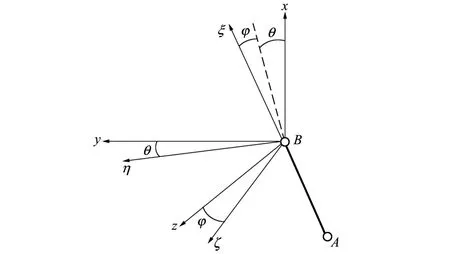
图1 描述相对运动的球星坐标系
在图1中的B点是空间站的重心位置,A点是被释放的载荷相对于空间站的重心位置,Bx轴是从B点朝向地心的半径矢量方向,By轴是横向方向,Bz轴是空间站运动轨道面的法线方向。θ是空间站运动轨道面的面内角Bxy,ϕ是与运动轨道平面的面外角[4-5]。
不计系绳质量的空间站在椭圆轨道上运行的动态系绳系统的模型如下:
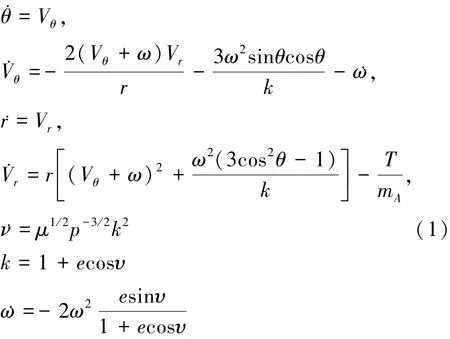
e、p、υ为偏心率,轨道的聚焦参数和空间站的真近点角;T为系绳拉力;r为释放的系绳长度;mA为释放的载荷重量。
2 控制方法
系绳的展开控制部分主要分为2个部分:①绳展开3 km,主要目的是保证载荷与基站航天器安全分离;②绳展开到30 km,控制的最终目的是将末端载荷送入到系绳与地垂线的偏离角约为50°的点处,系绳展开最终速度为零。
2.1系绳第一部分展开的控制率
在本文中系绳系统展开的第一阶段采用了末端载荷运动轨迹是圆圈的控制律将系绳展开到垂直位置。这一阶段的控制律是建立在文献[4]中所给的动力学规律基础上的,该动力学规律的表达式如下(系绳的第一阶段展开最终长度LK=3 km)

使用数值形式的规律(2)会引起载荷逆运动(系绳可能会回卷入控制机构),对于在项目YES2中采用的机构不允许这样。因此在文献[4]中针对控制律(2)对带有下列极限条件的边值问题进行了求解

2.2系绳第二部分展开的控制率

式中:Tmin,Tmax,Ln为控制律参数。对于最终长度LK=30 km(系绳在第一阶段展开的最终长度为3 km)得到下列参数值:Tmin=0.02 N,Tmax=1.018 N,Ln=24.17 km。此时,系绳与地垂线的最大偏离角约为50°。
3 空间系绳展开和释放载荷的过程
本文的仿真是基于假设从天宫一号空间站上通过系绳释放一个载荷,系绳全部展开后,剪断系绳,载荷返回到地面的过程,其中天宫一号质量为8 500 kg,载荷质量20 kg,空间站的轨道高度350 km。本文对长度为30 km的系绳进行展开释放实验。
系绳的展开过程主要分为3个主要阶段。第一阶段,末端载荷以零相对速度进入地垂线方向。在这个阶段中系绳系统以较低速度展开,系绳的最终展开长度约3 km(大概6 000 s)。进入展开的第二阶段,这一阶段的速度比较大,展开的最终长度约27 km,占用了大概2 800 s的时间。在第二阶段中,控制的最终目的是将末端载荷送入到系绳与地垂线有一定偏离角的位置处,系绳展开最终速度为零。之后系绳的展开变为系绳末端载荷的自由摆动运动,并在末端载荷通过地垂线时切断系绳[4-8]。本文的主要研究内容不是系绳展开的控制,这里不详述,本文只给出系绳展开轨迹和结果如图2所示。
[4-5]已经证明当载荷摆动到空间站正下方时切断系绳,有效制动冲量最大,载荷进入大气层时的进入角度最大,本文计算得到的进入大气层角度为1.46°,满足进入大气层要求。本文中选取的进入大气层高度为110 km,剪断系绳后到落到地面的轨迹图3所示。
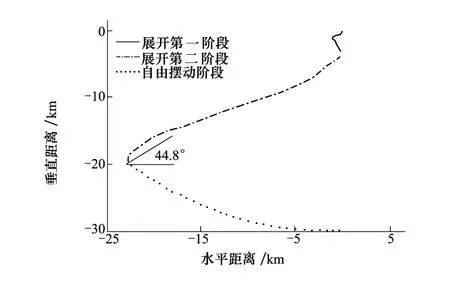
图2 系绳展开过程载荷相对于空间站的轨迹图
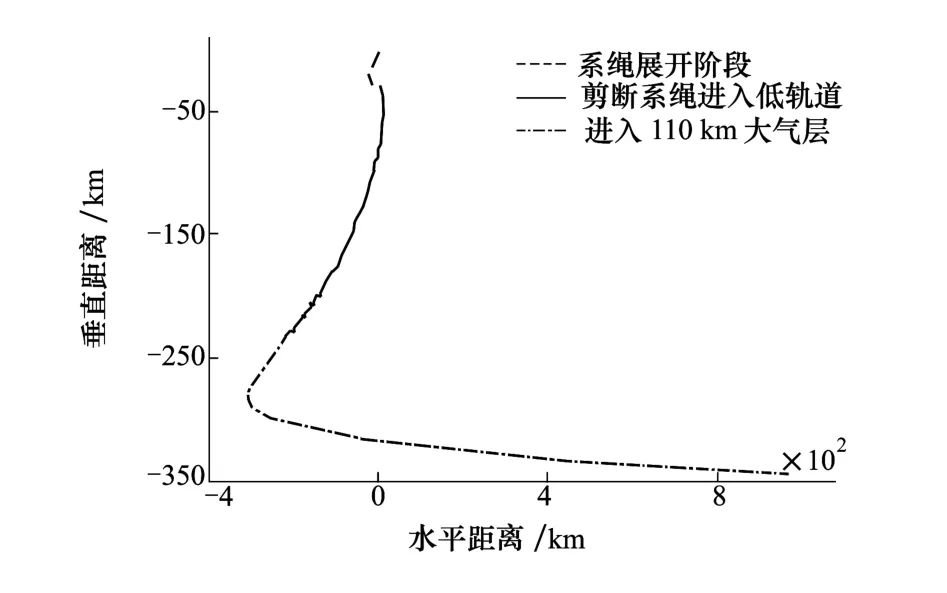
图3 载荷相对于空间站的轨迹图
4 星下点轨迹和确定初始展开点
本文把载荷的返回的地面的范围定在内蒙古地区,目标位置为北纬42.5°,东经108°。
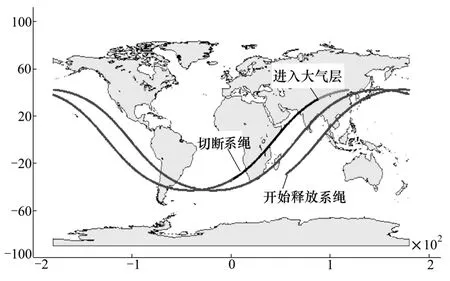
图4 星下点轨迹图
为了确定从轨道什么位置开始释放系绳,载荷能够到达所指定的位置,初步随便给定一个开始释放系绳的时间点,通过着陆点调整释放位置,如参考文献[9-10]。经过几次调整,本文最终给定的初始条件为:轨道倾角42.7°,升交点赤经81.9°,近地点幅角70.3°,释放位置距离近地点角度为244.1°。
最终着陆点位置为纬度42.4°,经度108.4°,达到预期要求。
5 当存在误差时着落点的偏差情况
第四节计算给出的展开初始位置条件,载荷能够返回到地面的目标点是在标准系绳展开程序下,也就是轨道为圆形轨道,高度为350 km,并且假设展开一切顺利,当载荷摆动到空间站的正下方(载荷与垂直方向夹角为0°),切断系绳。由于系绳的展开控制程序和进行各个阶段的时间节点在释放系绳之前就要输入到控制设备里,在释放过程中如果出现轨道高度等条件和实验时不一样的情况,载荷到地面的着陆点一定会出现一定偏差。
鉴于以上原因,本文在标准条件的控制程序下,当给定一些常有的误差情况下实验,观察分析着陆点的偏差情况。
5.1当轨道高度有偏差时
标准程序是在轨道高度为350 km条件计算得到的,当轨道高度从330~370 km变化,以标准程序控制系绳展开,着陆点的变化情况如图5所示。
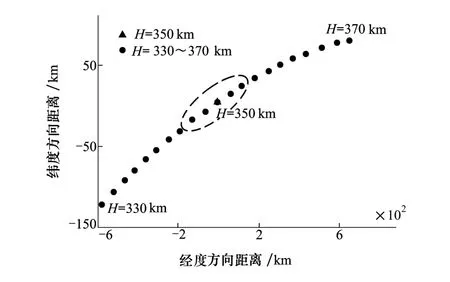
图5 着陆点在轨道高度有误差时的位置分布图
从图5中可以看出,当轨道高度为330 km和370 km,误差已经非常大。图中的椭圆是轨迹上一个允许着陆的范围。也就是当轨道高度在(345~355 km)范围变化还是可以接受的。
5.2当轨道偏心率有偏差时
标准程序是在高度为350 km圆形轨道条件计算得到的,当偏心率e从0到0.001 5变化,以标准程序控制系绳展开,着陆点的变化情况如图6所示。
从图6中可以看出,当偏心率e等于0.001 5时,误差已经非常大,当偏心率e小于0.000 7时,着陆范围可以接受。
5.3当剪断系绳的时机有偏差时
标准程序是在载荷和垂直方面夹角为0的时候剪断系绳得到的,在展开过程中如果出现一些误差,剪断系绳的时机就会提前或者偏后,本文给出了当载荷与垂直方向的夹角从-5°~5°范围变化,以标准程序控制系绳展开,着陆点的变化情况如图7所示。
从图7中可以看出,但系绳被提前剪断时,即当载荷与垂直方向的夹角小于0°时,载荷是提前着陆的,这也和YES2实验结果相吻合[5]。当载荷与垂直方向的夹角为-2°~+3°度的范围内剪断系绳。地面的误差是可以接受的。
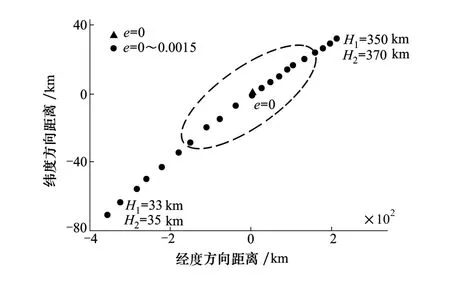
图6 着陆点在轨道偏心率有误差时的位置分布图
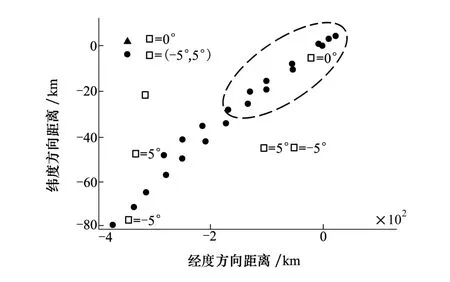
图7 着陆点在剪断系绳的时机有误差时的位置分布图
6 结 论
本文分析了利用空间系绳系统返回载荷到地面目标点的过程中,当展开过程中存在轨道高度、轨道偏心率以及剪断系绳的时机出现一定误差的情况下,导致着陆点的偏差情况。当轨道高度在(345~355 km)范围变化;轨道偏心率e小于0.000 7时;当载荷与垂直方向的夹角为-2°~+3°的范围内剪断系绳时,着陆点偏差小于200 km,可以接受。
参考文献:
[1] Tomlin D D,Mowery D K,Musetti B,et al.TSS Mission1 Flight Dynamics Anomalies[C]//Proceedings of the Fourth International Conference on Tethers in Space,Hampton,VA,1995:119-132
[2] Smith H F.The First and Second Flights of the Small Expendable Deployer System(SEDS)[C]//Proceedings of the Fourth International Conference on Tethers in Space,Hampton,VA,1995:43-55
[3] Zedd M F.Experiments in Tether Dynamics Planned for ATEX′s Flight[J].Advances in the Astronautical Sciences,1997,97 (1):25-44
[4] 扎伯罗特诺夫·尤里著,空间系绳系统运动动力学与控制导论[M],王长青,译,科学出版社,2013
Zabolotnov Yuriy.Introduction to Space Tether Dynamics and Motion Control Systems[M],Wang Changqing,Translator Science Press,2013(in Chinese)
[5] Williams P,Hyslop A,Stelzer M,et al.YES2 Optimal Trajectories in Presence of Eccentricity Andaerodynamic Drag[C]//The 57th International Astronautical Congress,Valencia,Spain,2006
[6] Sanmartin J R,Charro M.Performance of Electrodynamic Tethers and Ion Thrusters against Hybrid Systems[J].Journal of Propulsion and Power,2006,22(3):698-700
[7] He Yong,Liang Bin,Xu Wenfu.Study on the Stability of Tethered Satellite System[J].ActaAstronautica,2011,68:1964-1972
[8] Sanmartin J R,Estes R D,Lorenzini E C,et al.Efficiency of Electrodynamic Tether Thrusters[J].Journal of Spacecraft and Rockets,2006,43(3):659-666
[9] 何力,赵汉元.载人飞船标准返回轨道设计[J].国防科技大学学报,1996(03):63-67
He Li,Zhao Hanyuan.A Design of Standard Return Trajeetory for Manned Spaceship[J].Journal of National University of Defense Technology,1996(03):63-67(in Chinese)
[10]Vas I E,Kelly T J,Scarl E A.Space Station Reboost with Electrodynamic Tethers[J].Journal of Spacecraft and Rockets,2000, 37(2):154-164
Analyzing Deviations of Returning Load from Targeted Landing Point When SPace Tether System Is Used
Xu Xiaoye1,2,S.A.Ishkov1,P.V.Faddeenkov1,Wang Changqing2
(1.Aircraft Institute,Samara State Aerospace University,Samara 443086,Russia
2.Department of Automation,Northwestern Polytechnical University,Xi′an 710072,China)
When tether system is used,we analyze the deviations,which are due to the errors of the deployment process of returning load from targeted landing point.We first give the mathematical model and calculation procedure of the whole processing,including:deployment of the tether line,free-swinging,cutting the tether line,entry into the atmosphere and eventually falling into zone surrounding the targeted landing point;next,in the absence of any error condition,we calculate the appropriate track position for beginning the release of tether line,so that the returning load can land on the targeted landing point;finally,when there is an error of orbital altitude,orbital eccentricity or the timing of tether line cutting,we calculate the range of deviation from the targeted landing point.
altitude control;calculations;computer simulation control;dynamics;error analysis;mathematical models;optimization;orbits;parametrization;tether lines;trajectory;velocity;orbit altitude;orbit eccentricity;return load;space tether;timing of tether line cutting
V448.2
A
1000-2758(2016)02-0294-05
2015-09-15基金项目:2011年国家国际科技合作专项与陕西省科学技术研究发展计划(2013KW09-02)资助
徐小野(1986—),西北工业大学博士研究生,主要从事空间系绳展开控制的研究。
猜你喜欢
英语世界(2022年5期)2022-05-18
天文学报(2021年5期)2021-10-09
天文学报(2021年4期)2021-08-14
北京航空航天大学学报(2021年7期)2021-08-13
空间科学学报(2021年2期)2021-07-21
空间科学学报(2021年6期)2021-03-09
载人航天(2017年4期)2017-08-17
空间控制技术与应用(2015年4期)2015-06-05
航天器工程(2014年4期)2014-03-11
航天器环境工程(2013年2期)2013-11-28
