
三电源自动转换开关操作机构设计及其仿真研究
2017-01-07 03:16李文华常惜阳王端阳
河北工业大学学报 2016年4期
李文华,常惜阳,王端阳,王 俊
(1.河北工业大学 电器研究所,天津 300130;2.浙江正泰电器股份有限公司,浙江 乐清 325000;3.天水二一三电器有限公司,甘肃 天水 741001)
三电源自动转换开关操作机构设计及其仿真研究
李文华1,常惜阳1,王端阳2,王 俊3
(1.河北工业大学 电器研究所,天津 300130;2.浙江正泰电器股份有限公司,浙江 乐清 325000;3.天水二一三电器有限公司,甘肃 天水 741001)
三电源自动转换开关是三电源供电系统连续供电的关键,其操作机构是实现电源切换的核心.本文介绍了三电源自动转换开关的研究现状和组成,并从三电源供电系统的使用要求出发,设计了一种可用于三电源自动转换开关的操作机构,给出了工作原理和控制方案.最后通过虚拟样机技术对该机构进行了三维建模和运动学仿真,结果表明该机构可以达到三电源自动转换开关的工作要求.
三电源;操作机构;虚拟样机技术;运动学仿真;自动转换开关
0 引言
随着工业现代化和科技水平的提高,多种行业对供电安全性、连续性、可靠性的要求也随之提高,依据负载的性能及要求,需在两路或者多路电源间进行切换,以保证连续供电.国家标准《供配电系统设计规范》(GB50052-2009)中规定:一级负荷中特别重要的负荷供电,除应由双重电源供电外,尚应增设应急电源,并严禁将其它负荷接入应急供电系统.三电源自动转换开关就是为满足这一供电要求而设计的,它具有电源状态检测、电源间自动切换等功能,能够防止故障电源向负载供电,避免因电源故障等造成经济损失.
目前,三电源自动转换开关的研究仍处于起步阶段,特别是操作机构的研究资料几乎没有,可用于三电源自动转换开关的操作机构仅有三电源自动转换开关驱动操作机构[1]和三电源电动操作机构[2].但是前者的操作机构中的断路器手柄在分闸中必定随着驱动弹簧的振动将两路供电电源同时切入供电系统,造成短路;而后者的操作机构需要2个电机的准确配合才能实现3路供电电源的切换,增加了结构的复杂性,降低了可靠性.针对上述可用于三电源自动转换开关的操作机构存在的问题,本文提出了一种新可用于三电源自动转换开关的单电机操作机构,不仅可在任意时刻、任意方向均能实现3路电源之间的切换和对不同规格功能的断路器进行操作,而且也能实现双电源自动转换开关与三电源自动转换开关功能的通用.
1 三电源自动转换开关
三电源供电系统多应用在机场、石化、煤矿等场合[3-5],采用备自投切换方式,即主供电源异常时切换到备用供电电源,而备用供电电源异常时将由第3路供电电源进行供电[6-7].对于3路供电电源间的切换,可采用模糊控制算法对其电能质量进行模糊处理,将切换方式转化为专家控制算法的规则库,并置于控制器中.根据3路供电电源的电能质量模糊处理后的结果,在控制器中查表,实现3路供电电源间的切换[8].
三电源自动转换开关与双电源相似,均是以MCU为控制核心,以机电联锁机构为执行元件[9],主要由电压频率采样电路、控制器、操作机构、断路器等组成,如图1所示.
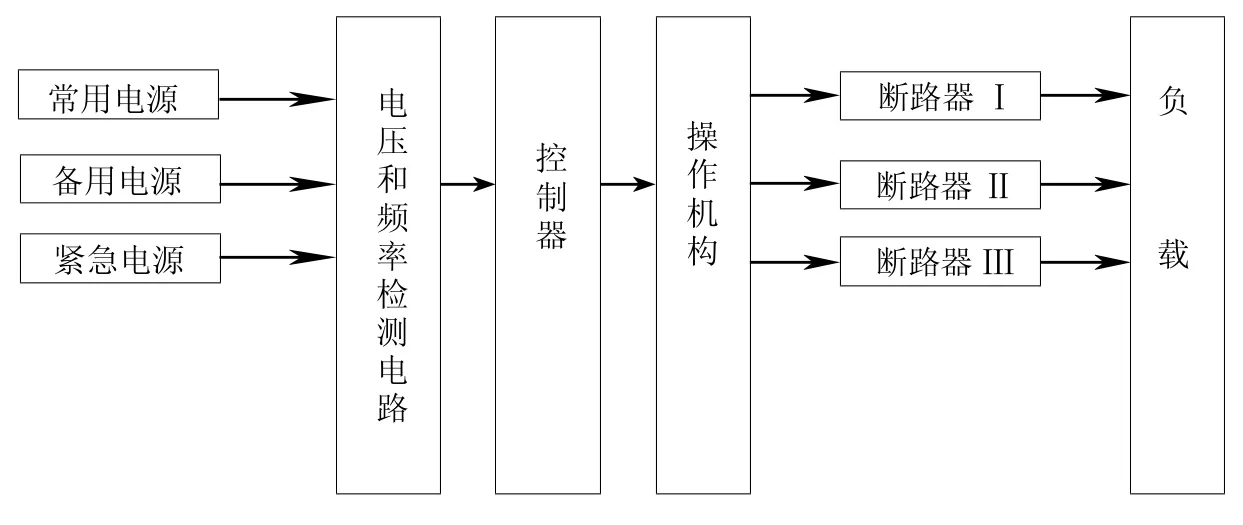
图1 三电源的组成框图Fig.1 Block diagram of the three power supply structure
当控制器检测到常用电源的电压或频率出现的偏差超出用户设定的范围或相序错误时,微机控制程序依据电源切换控制策略,通过延时(可调)电路驱动相应的指令向电动操动机构发出指令.操作机构将常用电源断路器分闸,在备用电源参数正常的情况下,执行备用电源断路器合闸指令;否则,在紧急电源参数正常的情况下,将紧急电源断路器合闸,或者,操作机构不动作.三电源自动转换开关可最大限度地保证对各种重要负荷场合持续供电,减少故障时间.
三电源自动转换开关控制器的设计必须考虑电气互锁,同时3台断路器的机构操作部分应设置机械互锁装置,即同时由切换规则以及断路器状态来确定控制输出命令,从而保证当1个断路器处于合闸状态时不会发出另2个断路器的合闸信号,进一步提高自动转换开关供电的可靠性.
2 三电源自动转换开关操作机构的结构与原理
三电源自动转换开关要求其操作机构每次只对1路供电电源进行操作,对其它两路供电电源不操作,在对其他供电电源操作之前必须完成本次供电电源的切除,而且必须保证3路供电电源间的机械互锁.
本文所设计的操作机构中3个断路器对应的机构相同且适用于3个断路器在空间中排列为一条直线的操作,其可在任意位置任意方向均能实现3路电源之间的切换,也可对不同规格功能的断路器进行操作,保证3路供电电源间的机械互锁,并且实现双电源自动转换开关与三电源自动转换开关功能的通用.由于3个断路器的分合闸机构一样,本文仅表示出1个断路器分合闸的机构简图,如图2.

图2 机构简图Fig.2 Diagram ofmechanism
机构简图分析如下:主动齿轮与从动齿轮啮合,带动固定在从动齿轮偏心孔上的连杆推动杆件运动.根据机构简图的分析,本文提出了一种三电源自动转换开关的操作机构,如图3所示,并参见图3说明.
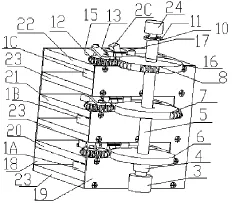
图3 操作机构示意图Fig.3 Schematic diagram of operatingmechanism
该机构中电机为动力来源,断路器的通断主要由不完全齿轮、从动齿轮、连杆、连接板、接通推板和关断推板完成,断路器手柄与断路器固定在一起.转动组件是由电机、通过联轴器与电机连接的旋转轴、第1不完全齿轮、第2不完全齿轮和第3不完全齿轮、位于旋转轴上端的下圆板以及固定安装在下圆板上的上圆板和角位移传感器共同构成的.该机构可以分别调节接通推板、关断推板与连接板的距离来调节断路器手柄移动的距离,实现对不同规格功能断路器的操作.
本文设计的三电源自动转换开关操作机构中不完全齿轮的齿分为2组,2组齿轮所占的弧度均为,2组齿之间相距的最小弧度为3个不完全齿轮圆周上的齿在空间中呈120°交错装配,3个不完全齿轮的齿在空间中两两相距弧度均为三电源自动转换开关的操作机构应满足角度约束条件如下

3 三电源自动转换开关操作机构的控制原理
3.1 操作机构停止位置示意图
对于3个断路器通断的准确控制,该操作机构采用了角位移传感器来获得第1不完全齿轮的2组齿相距最小弧度为20°的中间位置信息,而断路器的接通和分断的位置示意图如图4所示.
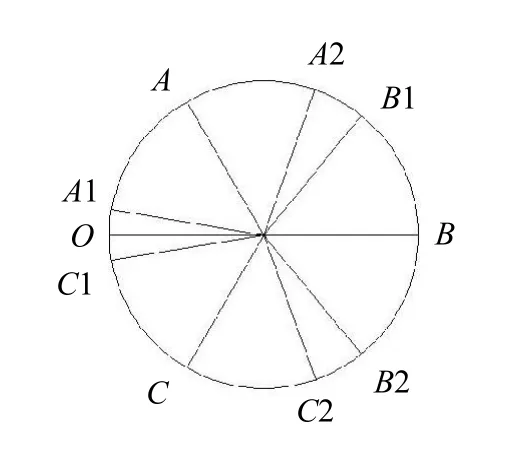
图4 断路器接通和分断的位置示意图Fig.4 Schematic diagram of the circuitbreakers' connected and brokeoff position
A、B和C点位置信息分别表示断路器I、II、III的合闸状态,O点位置信息表示该操作机构的初始状态即3个断路器均处于分闸状态,A1、A2、B1、B2、C1和C2点位置信息分别表示断路器I、断路器II和断路器III的分闸状态.
3.2 角位移传感器信号采集电路设计
机构采用霍尔式角位移传感器WDH22 0505来检测第1不完全齿轮的两组齿相距最小弧度为20°的中间转过的角度,如图5所示为角位移信号采集电路图.角位移传感器WDH22 0505的有效电气转角为360°,其电压信号经过降压输入到MCU的A/D端口[10],进而实现控制器对于操作机构角度位移的实时检测.
3.3 控制方案
以断路器I的通断对该机构的运动过程进行阐述,断路器I的结构示意图如图6所示,2A为断路器I的手柄.
电机驱动转动组件从图6的位置开始顺时针运动到A1时,第1不完全齿轮的1组齿带动从动齿轮逆时针运动,固定在从动齿轮偏心孔上的连杆将驱动连接板、接通推板和关断推板运动,接通推板和关断推板将推动断路器I手柄运动,使断路器I处于合闸状态,此时第1不完全齿轮两组齿相距最小弧度为20°的中间位于A点位置,角位移传感器获得信息,电机停转,断路器II和断路器III处于分闸状态.
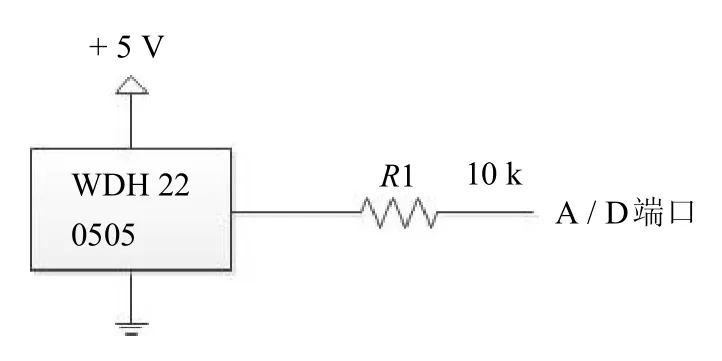
图5 角位移传感器信号采集电路Fig.5 Angular displacementsensor signal acquisition circuit
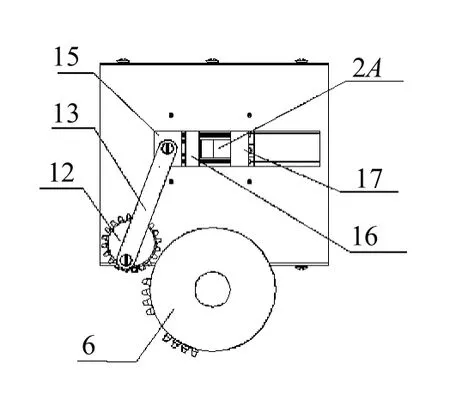
图6 断路器I的结构示意图Fig.6 Block diagram of the circuitbreaker structure
转动组件在A点位置逆时针运动时,第1不完全齿轮的一组齿带动从动齿轮顺时针运动,固定在从动齿轮偏心孔上的连杆将驱动连接板、接通推板和关断推板运动,接通推板和关断推板将推动断路器I手柄运动,使断路器I处于分闸状态,此时第1不完全齿轮的两组齿相距最小弧度为20°的中间位于A1点位置时,角位移传感器获得信息,电机停转,断路器II和断路器III仍处于分闸.
转动组件在A点位置顺时针运动时,第1不完全齿轮的另一组齿带动从动齿轮逆时针运动,固定在从动齿轮偏心孔上的连杆将驱动连接板、接通推板和关断推板运动,接通推板和关断推板将推动断路器手柄运动,使断路器I处于分闸状态,此时第1不完全齿轮的两组齿相距最小弧度为20°的中间位于A2点位置,角位移传感器获得信息,电机停转,断路器II和断路器III仍处于分闸状态.断路器II和断路器III的分合闸可以参照断路器I的分合闸过程.
由上述分析的阐述,并结合操作机构中转换机构和执行机构的设计可知,断路器I、II和III在任意位置任意方向均能实现3路电源之间的切换并能够保证3路供电电源间机械互锁.
4 操作机构的运动学仿真
虚拟样机技术是一项新生的工程技术,电气工程师可借助这项技术在计算机上建立电器产品机械系统的模型,模拟现实环境下系统的运动和动力特性,并根据仿真结果细化和优化系统设计,从而为样机的设计和制造提供参数依据[10-12].本文通过Pro/E软件对该机构进行了三维建模,如图7所示.在其机构仿真环境中,对操作机构进行运动学仿真,观察该机构的3路电源之间的机械联锁和电机正反转情况下3路供电电源的任意切换情况.
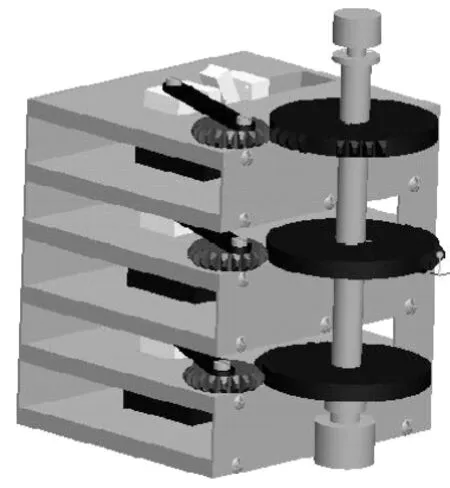
图7 三维仿真模型Fig.7 Three-dimensionalsimulationmodel
本文以图6为初始位置并结合其控制方案进行仿真,以断路器I手柄的位置变化为分析对象.电机由O点运动到A点时,断路器I合闸情况如图8a)所示;电机由A点运动到A2如图8b)所示.
从图8中可以看出,第1不完全齿轮均在电机正反转时可分别实现断路器的I合闸或分闸,而断路器I手柄的位置变化约为14mm.在整个电机运动过程中,断路器II和断路器III的手柄位置均没有变化.仿真分析说明该操作机构可以在任意时刻任意方向实现3路电源的任意切换,并且能够达到三电源自动转换开关对其操作机构的要求.
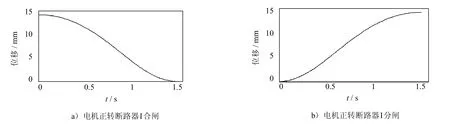
图8 断路器I手柄位置变化图Fig.8 The changeof position of handleof the circuitbreaker I
5 结束语
本文对三电源自动转换开关的研究现状进行了阐述,并对现有操作机构的问题进行了分析,提出了一种可用于三电源自动转换开关的操作机构.运用虚拟样机软件Pro/E完成了三电源自动转换开关操作机构的三维建模与运动学仿真,结果表明该机构完全可以实现3路供电电源的任意切换,并且仿真结果为三电源自动转换开关的控制策略的研究提供了参考依据,也为三电源自动转换开关类似的操作机构及相关机构的设计与研发提供了参考和依据.
[1]李文华,刘文霞,孟宪春,等.三电源自动转换开关驱动操作机构 [P].中国:CN104008931A,2014-08-27.
[2]许承均,梁大淳.三电源电动操作机构 [P].中国:CN104505276A,2015-04-08.
[3]郭红丹,姚成乾.矿井开掘巷道“三风机、三电源”自动倒台系统研究 [J].现代制造技术与装备,2015,50(1):19+37.
[4]袁新国.机场供电低压三电源自动切换控制 [J].科技风,2010,22(7):246-247.
[5]赵征燕.三电源自动切换系统的设计 [J].电气技术,2009,9(3):67-69+76.
[6]陶国彬,薄大宇.三电源供电系统快速切换方案与仿真分析研究 [J].电气传动自动化,2015,37(3):1-6+11.
[7]黄凯,李志刚,杨春稳.煤矿风机隔爆型大功率应急供电系统的研究 [J].煤炭学报,2011,36(11):1938-1942.
[8]谢子青.电源智能自动切换控制技术的研究 [J].电子世界,2013,34(3):34-35.
[9]张德民,刘洪锦,高强,等.电梯双电源供电装置PLC控制系统设计 [J].电气传动,2012,42(8):68-72.
[10]孟永鹏,贾申利,荣命哲.真空断路器机械特性的在线监测方法 [J].高压电器,2006,42(1):31-34.
[11]王志国.基于PRO/E的水草切割装置特征建模及运动仿真 [D].呼和浩特:内蒙古农业大学,2006.
[12]袁锐,马旭,马成林,等.精密播种机单体的虚拟制造和运动仿真 [J].吉林大学学报(工学版),2006,36(4):523-528.
[责任编辑 代俊秋]
Research on operatingmechanism design and simulation for three powerautomatic transfer switch
LIWenhua1,CHANG Xiyang1,WANG Duanyang2,WANG Jun3
(1.ElectricalApparatus Institute,HebeiUniversity of Technology,Tianjin 300130,China;2.Zhejiang CHINT Apparatus Lim ited Company,Zhejiang Yueqing325000,China;3.Tianshui213 Electrical Apparatus Limited Company,Gansu Tianshui741001,China)
Threepowerautomatic transfersw itch is thekey of threepowersupply system to supply continuouspower,and itsoperatingmechanism is the core to actualize the power sw itch.This paper introduces the research statusand structure of the threepowerautomatic transfersw itch,and designs theoperatingmechanism of the threepowersupply system,and gives theworking principleand controlscheme.Finally,the3Dmodeling and kinematicssimulation of themechanism is carried outby the virtualprototyping technology.The resultsshow that themechanism can achieveautomatic conversion.
threepower;operatingmechanism;virtualprototype technology;kinematicssimulation;automatic transfer sw itch
TP303
A
1007-2373(2016)04-0001-05
10.14081/j.cnki.hgdxb.2016.04.001
2015-10-19
国家自然科学基金(51377044)
李文华(1973-),男(汉族),教授,博士.
猜你喜欢
发明与创新(2022年27期)2022-09-16
科技与创新(2022年11期)2022-06-14
铁道通信信号(2021年7期)2021-08-17
机电信息(2021年17期)2021-07-01
电子制作(2021年4期)2021-06-16
起重运输机械(2021年4期)2021-03-26
设备管理与维修(2020年23期)2021-01-04
内燃机与配件(2020年22期)2020-09-10
水电站机电技术(2019年1期)2019-01-22
课程教育研究·学法教法研究(2018年14期)2018-08-11
