
运营铁路隧道衬砌背后较大空洞的精确检测技术
2017-01-09 02:01仇文革王立川王希元
隧道建设(中英文) 2016年12期
龚 伦, 仇文革, 王立川,2, 王希元
(1. 西南交通大学土木工程学院交通隧道工程教育部重点实验室, 四川 成都 610031;2. 成都铁路局, 四川 成都 610082)
运营铁路隧道衬砌背后较大空洞的精确检测技术
龚 伦1, 仇文革1, 王立川1,2, 王希元1
(1. 西南交通大学土木工程学院交通隧道工程教育部重点实验室, 四川 成都 610031;2. 成都铁路局, 四川 成都 610082)
目前采用地质雷达等无损检测技术可快速、准确检测衬砌厚度和衬砌中钢筋数量等参数,并可有效判识衬砌背后空洞等缺陷沿隧道纵向和环向长度,但对这类缺陷的径向尺度因介电常数的差异、反射面的识别等原因而无法准确判识。依托西南地区某运营铁路隧道衬砌背后存在较大空洞的工程实际,结合现场钻孔调查和地质雷达无损检测,首次运用钻孔三维激光扫描技术对运营铁路隧道衬砌背后空洞进行扫描,实现精确检测,得到衬砌背后空洞的三维形态和具体尺寸,检测成果可为隧道病害整治提供准确的数据,可设计出更具针对性和操作性的整治方案。提出的“物探+钻孔三维激光扫描”技术,能实现衬砌背后空洞“粗中有细”的全面检测。
运营铁路隧道; 衬砌背后空洞; 钻孔三维激光扫描; 三维形态; 精确检测
0 引言
从1991年国际隧协开始研究隧道衬砌无损检测技术开始[1],地质雷达无损检测技术因其具有高效、快速、准确,可对衬砌厚度、支护中钢筋/钢架等参数进行快速检测和准确识别等优点,在隧道施工质量检测中得到广泛运用。因衬砌背后空洞外侧反射界面的不易识别和空洞内空气的电磁波速度与其状态、含水量等有关而不易获得,使得不能准确判别空洞的径向尺度,这是地质雷达无法完美解决的难题之一。针对该问题学者们已进行如下研究: 杨峰等[2]给出不同脱空量模型的波形双峰极值点幅度变化规律;张鸿飞等[3]利用二维时域有限差分法对衬砌空洞雷达图谱进行正演模拟;刘新荣等[4]采用地质雷达三维探测确定空洞大小、形态和位置。
三维激光扫描技术具有非接触、精度高、扫描速度快、获取数据量大等优点,能采集到目标体的高精度三维数据,实现三维可视化[5]。国内已将三维激光扫描仪运用于溶洞、采空区、罐车(箱)容积等探测,以及隧道/巷道和滑坡等变形监测的领域[6-11]。
若将三维激光扫描仪用于衬砌背后空洞(隐蔽工程、复杂作业环境和人不易到达场所)检测,将会得到前所未有的成效,解决大量的工程实际问题。本文依托西南地区某运营铁路隧道衬砌背后存在较大空洞的工程实际,结合现场钻孔调查和地质雷达无损检测,首次运用钻孔三维激光扫描技术对运营铁路隧道衬砌背后空洞进行扫描,实现精确检测。
1 问题提出
1.1 依托工程情况
西南地区某运营铁路隧道洞身标(此处及下文洞身标均指距隧道进口的距离,单位为m)1 242处衬砌拱顶有一进料口(隧道新建时灌注混凝土的入口),在进行常规检查的敲击时有空响,破口后发现该处衬砌厚度很薄(约10 cm)且衬砌背后存在空洞。
1.2 提出问题
衬砌背后空洞较小时,采用回填灌浆措施即可;若空洞较大,可能会因回填灌浆破坏既有衬砌结构,必须探明空洞的大小,以便采取更有针对性和操作性的措施,既可消除空洞上方掉块砸坏衬砌的隐患,又可避免采取不当措施造成既有衬砌的损坏,从而确保既有隧道结构和行车安全。
2 钻孔探测和无损检测
2.1 钻孔探测
在铁路相关部门配合下,对空洞临近段落进行钻孔探测,结果见表1。

表1 钻孔探测结果统计表
由表1可知,钻孔范围内拱顶处的空洞较高(192~264 cm)、沿纵向13 m长无明显减小,且拱顶偏右1.6 m处仍存在较大空洞,故无法由钻孔确定空洞的范围和尺度,但得出了该空洞很大的结论。
2.2 无损检测
为了探明该处空洞沿隧道纵向的长度,采用地质雷达对洞身标1 150~1 425段进行了探测,1 240~1 250 段地质雷达图像见图1,经分析得本段衬砌厚度及背后空洞见表2。

红线为衬砌与空洞界面,蓝线为空腔与初期支护界面。
图1 洞身标1 240~1 250段地质雷达图像(单位: m)
Fig. 1 Ground penetrating radar image of tunnel section of 1 240-1 250 (m)

表2 地质雷达检测结果统计表
注: 衬砌背后空腔的波速近似为混凝土波速的(0.3/0.11)倍。
对比表1和表2数据,2种方法所得该段拱顶处空洞的径向尺度基本吻合,但仍无法获取该空洞的环向尺度,无法为后期隧道病害整治提供完整的数据。为此,引入钻孔三维激光扫描技术对其再次进行检测。
3 钻孔三维激光扫描检测
C-ALS是一款在50 mm钻孔中就可以深入地下进行空区探测的三维激光扫描仪。扫描仪探头直径为50 mm,使得它可沿钻孔深入到难以接近的空穴、地下空间以及空腔内。
C-ALS 的马达驱动双轴扫描探头(空腔尺度大于20 cm才能确保探头的自由转运),可以保证仪器能作球形360°扫描(见图2)以覆盖整个空穴,最大扫描距离为150 m。探头整合了倾斜和转动传感器,确保了激光扫描点云定向和定位的准确性。

图2 360°无盲区扫描
3.1 检测原理
C-ALS三维激光自动扫描系统采用激光测距原理,扫描探杆前段内置一个激光测距仪的扫描头,扫描头伸入采空区后,后台软件控制测距仪发射激光并进行360°旋转扫描,激光到达空区边界壁后反射回来被测距仪接受,通过发射和接收的时间差,可计算出边界到扫描头的距离S,假定激光发射的水平角度为α、垂直扫描角度为θ,可得出每个空区侧壁反射点的坐标。C-ALS激光探测原理见图3。每个空区侧壁反射点坐标见式(1)。

(1)
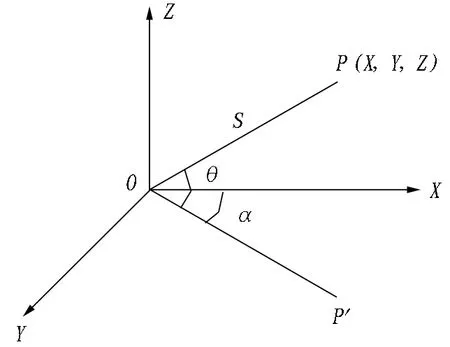
图3 C-ALS激光探测原理
3.2 检测准备
1)准备空压机等钻孔机具。
2)准备轨道车、平板车等作业平台。
3)钻孔(钻孔直径大于50 mm,以不小于55~60 mm为宜,以便于扫描仪能顺利通过钻孔进入空区)。隧道拱顶处钻孔见图4。
3.3 检测作业
1)安装C-ALS硬件设备,打开控制软件,将扫描仪与电脑进行连接。
2)将扫描仪探头利用延长杆伸入隧道顶部空区,由2名作业人员稳定延长杆(见图5)。

图4 隧道拱顶处钻孔

图5 稳定延长杆
3)设置软件参数,进行360°扫描(见图6),直至扫描结束。

图6 现场采集数据
4)待测量完成后,下放延长杆、取出探头,并拆卸各个连接部件,回收设备。
3.4 检测结果
3.4.1 激光扫描点云图和三维视图
激光扫描点云图见图7。三维视图见图8和图9。
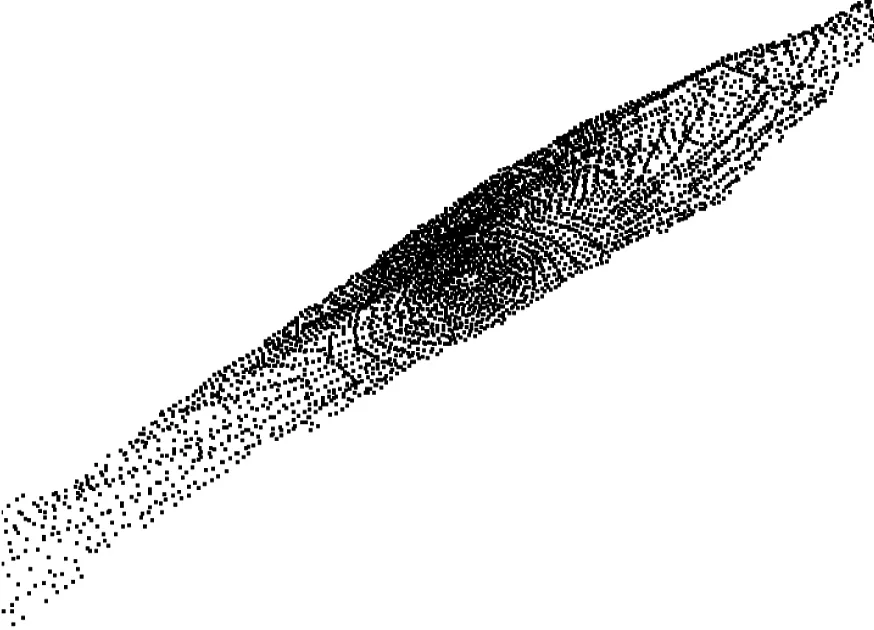
图7 激光扫描点云图

图8 三维视图-全局
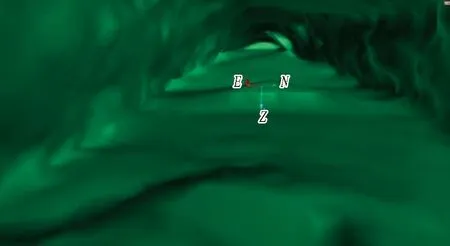
图9 空洞内部三维视图
3.4.2 横剖面图
沿隧道纵向每2 m作一个空洞横剖面,各剖面尺寸见表3,典型横剖面见图10和图11。
3.5 检测结果对比
3种检测方法在洞身标1 242处结果对比见表4。
表3 扫描空洞各剖面尺寸统计表
Table 3 Scanned lengths and heights of hollows at different cross-sections m

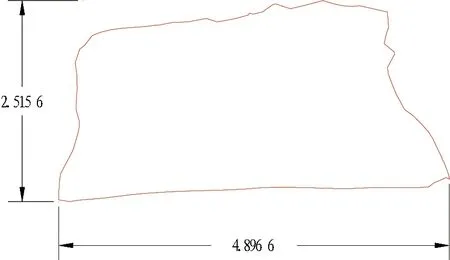
图10 洞身标1 242处横剖面图(单位: m)

图11 洞身标1 248处横剖面图(单位: m)

检测方法空洞高度/cm钻孔257地质雷达259钻孔三维激光扫描252
由表4可知,3种方法所得衬砌背后空洞检测结果基本一致,证明了方法的可行性和结果的正确性。
4 结论与讨论
1)针对隧道衬砌背后的大体量空洞,采用钻孔三维激光扫描技术得到了空洞的具体形态和尺寸,检测成果为后续的隧道病害整治提供了可靠的数据。
2)首次提出并运用了“地质雷达+钻孔+三维激光扫描技术”,对隧道衬砌背后较大空洞进行精确探测,可为类似工程提供借鉴。
3)在实际工程中,运用地质雷达等“物探+钻孔三维激光扫描”技术,可实现对隧道衬砌背后空洞粗中有细的全面检测。
[1] 刘敦文,黄仁东,徐国元,等. 应用探地雷达技术检测隧道衬砌质量[J]. 物探与化探,2001(6): 469-483.(LIU Dunwen, HUANG Rendong, XU Guoyuan, et al. The application of ground-penetrating radar to the inspection of tunnel lining quality[J]. Geophysical and Geochemical Exploration, 2001(6): 469-483. (in Chinese))
[2] 杨峰,彭苏萍,刘杰,等. 衬砌脱空雷达波数值模拟与定量解释[J]. 铁道学报,2008(5): 92-96. (YANG Feng, PENG Suping, LIU Jie, et al. Simulation of lining void area by radar waves and explanatory strategy[J]. Journal of the China Railway Society,2008(5): 92-96. (in Chinese))
[3] 张鸿飞,程效军,高攀,等. 隧道衬砌空洞探地雷达图谱正演模拟研究[J]. 岩土力学,2009(9): 2810-2816.(ZHANG Hongfei, CHENG Xiaojun, GAO Pan, et al. Research on forward simulation of tunnel lining cavity GPR images[J]. Rock and Soil Mechanics, 2009(9): 2810-2816. (in Chinese))
[4] 刘新荣,舒志乐,朱成红,等. 隧道衬砌空洞探地雷达三维探测正演研究[J]. 岩石力学与工程学报, 2010,29(11): 2221-2229. (LIU Xinrong, SHU Zhile, ZHU Chenghong, et al. Study of forward simulation for ground penetrating radar three-dimensional detection of tunnel lining cavity[J]. Chinese Journal of Rock Mechanics and Engineering, 2010, 29(11): 2221-2229. (in Chinese))
[5] 李根,谢劲松,霍庆立,等. 三维激光扫描系统测量方法与前景展望[J]. 机械工程师,2015(9): 135-137. (LI Gen, XIE Jinsong, HUO Qingli, et al. Measuring principle and development prospect of 3D laser scanner[J]. Mechanical Engineer, 2015(9): 135-137. (in Chinese))
[6] 彭林,刘波,过仕民,等. 采空区C-ALS探测及稳定性分析[J]. 矿业工程研究, 2015(4): 5-9. (PENG Lin, LIU Bo, GUO Shimin, et al. Goaf detection on C-ALS and its stability analysis[J]. Mineral Engineering Research, 2015(4): 5-9. (in Chinese))
[7] 肖厚藻,刘晓明,代碧波,等. 基于C-ALS的特大溶洞三维探测及其安全分析[J]. 矿冶工程, 2015(4): 12-16. (XIAO Houzao, LIU Xiaoming, DAI Bibo, et al. 3D Detection and safety analysis for extra-large karst cave based on C-ALS[J]. Mining and Metallurgical Engineering, 2015(4): 12-16. (in Chinese))
[8] 邵学君. 铁路罐车(箱)容积三维激光扫描测量方法[J]. 中国铁道科学, 2014(2): 79-85. (SHAO Xuejun. 3D laser scanning measurement method for the volume of railway tank car(container)[J]. China Railway Science,2014(2): 79-85. (in Chinese))
[9] 张蕴明,马全明,李丞鹏,等. 三维激光扫描技术在地铁隧道收敛监测中的应用[J]. 测绘通报, 2012(增刊1): 438-440. (ZHANG Yunming, MA Quanming, LI Chengpeng, et al. Application of three-dimensional laser scanning technology in Metro tunnel convergence monitoring[J]. Bulletin of Surveying and Mapping, 2012(S1): 438-440. (in Chinese))
[10] 王黎明,刘夫晓,王新生. 三维激光扫描技术在矿山巷道变形监测中的应用[J]. 矿山测量, 2013(3): 79-81. (WANG Liming, LIU Fuxiao, WANG Xinsheng. Application of three-dimensional laser scanning technology in mine roadway deformation monitoring[J]. Mine Surveying, 2013(3): 79-81. (in Chinese))
[11] 徐进军,王海城,罗喻真,等. 基于三维激光扫描的滑坡变形监测与数据处理[J]. 岩土力学, 2010(7): 2188-2196. (XU Jinjun, WANG Haicheng, LUO Yuzhen, et al. Deformation monitoring and data processing of landslide based on 3D laser scanning[J]. Rock and Soil Mechanics, 2010(7): 2188-2196. (in Chinese))
Accurate Detection Technologies for Larger Hollows Behind Linings of Operating Railway Tunnel
GONG Lun1, QIU Wenge1, WANG Lichuan1, 2, WANG Xiyuan1
(1. Key Laboratory of Transportation Tunnel Engineering of Ministry of Education, School of Civil Engineering,SouthwestJiaotongUniversity,Chengdu610031,Sichuan,China; 2.ChengduRailwayBureau,Chengdu610082,Sichuan,China)
The parameters, i.e. lining thickness and reinforced rebar of lining, and the longitudinal and circumferential length of hollow behind lining can be detected rapidly and accurately by nondestructive ground penetrating radar detection technology nowadays. However, the radial dimension of the hollow behind lining can not be clearly identified due to the difference of dielectric constant and recognition of reflecting surface. The technology of three-dimensional laser scanning in borehole is adopted to detect the hollow behind lining of an operating railway tunnel in Southwest China for the first time. The three-dimensional shape and sizes of the hollow are obtained based on borehole drilling method and ground penetrating radar. The detection results can provide accurate data for tunnel disease treatment and reference for pertinent and feasible tunnel disease treating schemes. The technology of geophysical prospecting+three-dimensional laser scanning in borehole can detect the hollows behind tunnel lining accurately.
operating railway tunnel; hollow behind lining; three-dimensional laser scanning in borehole; three-dimensional shape; accurate detection
2016-09-02;
2016-11-01
国家自然科学基金资助项目(51178399, 51478392)
龚伦(1974—),男,重庆长寿人,2008年毕业于西南交通大学,桥梁与隧道工程专业,博士,副教授,现主要从事隧道及地下工程近接施工影响及对策研究、既有隧道病害检测及整治技术研究工作。E-mail: gonglun33@126.com。
10.3973/j.issn.1672-741X.2016.12.015
U 45
B
1672-741X(2016)12-1507-05
猜你喜欢
上海金属(2021年2期)2021-04-07
电子制作(2019年15期)2019-08-27
模具制造(2019年3期)2019-06-06
小学生学习指导(低年级)(2018年12期)2018-12-29
故事作文·高年级(2017年2期)2017-03-01
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
新闻传播(2015年20期)2015-07-18
现代营销·经营版(2015年3期)2015-04-20
