网球捡球机自动化控制策略设计
2017-06-29 09:02东南大学吴健雄学院冯嘉伟杨宇宸宋雨遥林晓辉
电子世界 2017年11期
东南大学吴健雄学院 冯嘉伟 杨宇宸 宋雨遥 王 成 林晓辉
网球捡球机自动化控制策略设计
东南大学吴健雄学院 冯嘉伟 杨宇宸 宋雨遥 王 成 林晓辉
本文针对网球捡球机的自动化和智能化,提出了将遥控模块、陀螺仪模块、超声波模块与基于单片机的网球捡球机相结合,提出了一种能通过手动(遥控)或自动的方式遍历整个球场的创新型网球捡球机,并在理论的基础上进行了实验。该捡球机具有简单易用、拾取效率高、人为干预少的特点。
遥控;单片机;网球捡球机;超声波测距;陀螺仪
0.引言
网球作为世界第一的个人运动,在世界范围内具有很大的爱好者基数,在网球的多球训练后,大量网球散落在球场上,给训练者带来了很多麻烦。
目前,手动的网球捡球器械已经发展地比较成熟而且在市场上取得了一定的成功,主要包括筒状和筐状两种结构,分别如图1、图2所示。

图1 网球捡球筐
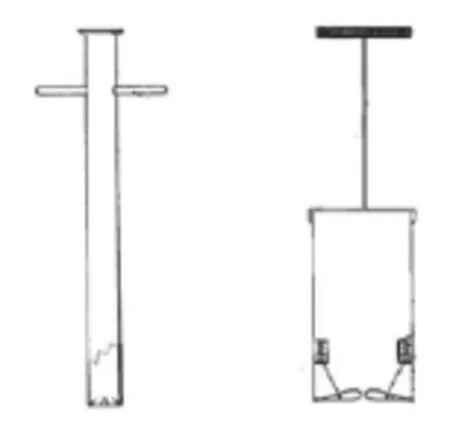
图2 网球捡球筒
这两种捡球机无论是在移动还是捡球时,都需要人力来完成,这两种捡球机结构简单,技术难度较低,因此价格较为低廉,具有经济性的优势,此外由于筐状、筒状结构材料使用较少,因此整体重量较轻。然而,这两种设计本质上仍需要人力的参与,只是减少了捡球的弯腰环节,并不能大幅降低劳动强度,也不能节省捡球的时间。
此外,李鹏在专利“一种网球自动捡球机”中提出了一种手推式的网球捡球机,这种捡球机上安装有手推用的提杆,其捡球装置由传感器控制,当传感器检测到附近有网球时,捡球装置的电机开始工作,将球捡拾入收集器中。这种捡球机只需要推行即可完成捡球的工作,能够在一定程度上提升捡球的效率,但是仍需要人为干预,且结构体积庞大,不便于携带。
本文针对网球捡球机目前发展的难题,基于现在市场占有率很高拾取机构做出了自动化改进设计,能够进一步提升智能化程度,节省人力。
1.手动遥控控制
1.1 总体设计方案
本设计的遥控部分采用PS2X遥控模块,该模块可以将信号发射器上的键盘或者摇杆的信号传输到接收器上,接收器与arduino单片机相连,由单片机对数字信号进行处理并且对步进电机的驱动器发出指令,控制网球捡球机的运动。
遥控控制的控制框图如图3所示。
考虑到使用范围和使用工况,本设计没有采用像汽车转向一样的转向机构,而是采用了在智能小车等装置中广泛使用的差速转向的解决方案。整体设计方案如图4所示。
前两个轮子为聚氨酯轮,直径200mm,而为了保证装置前进时的功率和转向时的稳定性,两个后轮采用有动力全向轮,直径127mm。当前后轮直径不同时,在前进和转向过程中的转速自然会有不同的要求,本设计用arduino单片机的4个端口作为4个步进电机的步进信号发生端,对4个电机的转速进行独立的控制。
由于本设计采用了差速转向的设计,所以在不同的工况要求下,左侧和右侧的车轮相比转速可能是不同的,但是,同侧两个轮子要求转向相同才能保证运动正常。
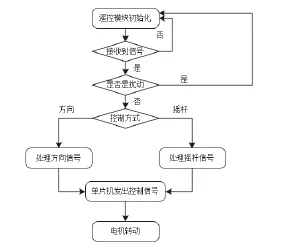
图3 遥控控制的控制框图

图4 整体设计方案
1.2 遥控系统扰动消除
遥控系统由于设计制造上存在偏差以及工况的复杂性等原因,在网球捡球机的调试过程中发现,发射器经常向接收器发射明显错误的键盘或者摇杆的位置信号,造成真个捡球机的异常运动等后果。此外,该扰动还具有很强的随机性和不确定性,因此需要用软件的方法进行消除。
在调试过程中发现,该扰动的表现形式通常为摇杆坐标发射的异常,很多时候,当摇杆位置为初始位置时,即(128,128)时,接受器的接受信号经常不确定地跳动为(255,255),考虑到(255,255)这个坐标在整个网球捡球机的使用过程中极少出现,因此本设计将该坐标的出现视为扰动,网球捡球机的接收器在接收到此信号后不对该指令做出任何反应。
1.3 方向键盘信号处理
本设计采用arduino单片机的两个端口为网球捡球机4个步进电机转向的控制端口,左侧两个电机共用一个,右侧两个电机共用一个。
在方向键盘控制的模式下,发射器向接收器发射的是上下左右四个方向的指令信号,设计要求为,当收到前或后的信号时,单片机向驱动器发送电平信号,使网球捡球机向正前方或正后方行驶;当接受到向左或者向右的信号时,单片机向接收器发送控制信号,使网球捡球机绕着车上一点,向左或向右原地转向。这也就要求,在向前行驶模式时,左右两侧电机均向前转动,在向后行驶时,所有电机向后转动,左转时,右侧电机向前,左侧电机向后,右转时,右侧电机向后,左侧电机向前。
由于前后运动时要求直线运动,左右转向时要求原地转动,所以左右侧的聚氨酯轮要求转速一致,麦克纳姆轮也要转速一致,而前后轮的转速之比由于直径不同,要求直行时与直径成反比,即127/200左右,而转向时,由于安装位置和差速转向的特性,经过计算,比值在0.61左右为宜。这也就要求arduino单片机根据转速的要求和驱动器的细分值送相应频率的脉冲信号至驱动器。本设计采用软件延时的方法解决这一问题,首先在初始化时将向4个驱动器脉冲信号的4个端口的电平全部拉高。将每个运动周期设为10ms,每个运动周期中可分为10000个时间长度为1μs的计数周期,在每个计数周期中,单片机主要完成延时1μs和计数的工作,当在某一计数周期中,软件计数的值与预先计算得到的前/后轮转动所需的时间值相等时,单片机即将该端口的电平拉低1μs,再将该口电平拉高,形成一个脉冲,使该端口控制的电机步进。
1.4 摇杆信号的处理
摇杆信号时通过发射器发射的模拟信号,横坐标为0~255,纵坐标也为0~255,在初始状态下,即无人为干预时,摇杆坐标为(128,128),与方向键盘信号相比,摇杆信号的复杂性远远超过了前后左右四个方向指令,需要对接受器接受到的二维坐标进行针对性处理,发现这些坐标中的共性和个性,提出个性化的解决方案。
本设计采用了两个函数,将摇杆传送的二维数字信号转化为左右两侧的速度信号。

本设计将式子1-1和1-2的计算结果d和e的绝对值作为左右两侧电机的相对速度值,将结果的正负作为两侧电机转向的参考值,可见在这种处理方式下,当横坐标小于128时,网球捡球机会向左转向,且坐标越小,转速越快,同理,在向其他三个方向运动时也同样满足设计要求,且可以完成“边转边走”的任务,大大提高了运动的灵活性和可控性。
在确定了两侧电机的转向和相对速度之后,只需要向相应的驱动器和脉冲信号即可,但这里需要注意的是,如果使用和方向键盘信号一样的软件延时方法来控制转速的话,相对速度大小需要转化为脉冲信号送入驱动器。因为速度的绝对值大小和脉冲的周期是成反比的,可以用一个较大的整数除以相对速度而得到相应的脉冲周期。

如式1-3和1-4所示,考虑步进电机细分等因素,选取整数2560,将速度信号转化为合适的脉冲周期。与1.3部分一样,控制循环中,每个循环都有1μs的延时,当软件计数的计数值能被b或者c整除时,向前轮或者后轮送脉冲信号,步进电机完成步进。
2.自动遍历控制
2.1 总体方案设计
该功能模式中,与遥控模式一样,运用arduino单片机作为控制的中枢,处理各个传感器的信号,并且对四个步进电机进行控制。PS2X遥控模块同样在该方案中得到使用,不过不作为遥控控制功能使用,而是作为紧急情况下的人为干预保护整个系统。此外,在这种工作模式下还增设了2个HC-SR04超声波测距模块和1个MPU6050陀螺仪模块作为负反馈信号对自动遍历过程中的内部扰动进行校正,实现闭环的高可靠性控制,系统的控制框图5所示。
2.2 失控保护
该设计要求当网球捡球机正在自动遍历球场时,操作人按住PS2X键盘上的R1键,作为应急指令,当捡球机遍历过程中因为自身内部扰动发生失控时,操作人需立即松开R1,当网球捡球机上的接收器未接受到发射器发送的R1被按下的信号时,立即停止运动,防止捡球机失控后与球场边网发生碰撞,造成捡球机的损毁。
此外,因为PS2X遥控模块的发射器和接收器之间可能存在信号质量不佳或因为距离过远产生的遥控信号传送问题,该设计设定当接收器超过50ms未收到发射器发送的任何信号时,作为失控的依据立即停止运动,直到再次收到控制信号。
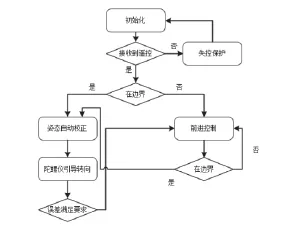
图5 系统的控制框图
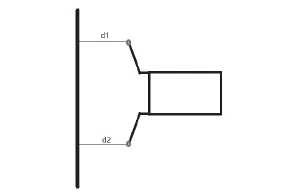
图6
2.3 边界的判断
如图6所示,网球捡球机的2个聚拢片前端装有2个超声波距离传感器,该传感器的能实现精度达到0.3cm的精准测距,考虑捡球机本身的大小和旋转中心等因素,将两个超声波传感器与边网距离的和d=d1+d2为100cm作为临界值,当网球捡球机在前进过程中探测到d值小于该临界值,则可以得出网球捡球机已经在球场的边界的结论,控制系统进入边界控制算法。
2.4 姿态自动调整
由于网球捡球机在遍历全场的过程中,场地不平坦,摩擦力不均匀等因素的存在,可能使捡球机遍历时的轨迹不完全垂直于边界,该扰动如果不被消除,将在之后的遍历过程中不断被放大,造成自动遍历的可靠性降低。

图7
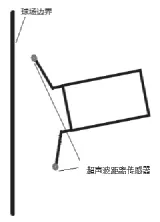
图8
如图7和图8所示,当网球捡球机的行进方向与周界不完全垂直时,两距离传感器的测距结果将会有所不同,当左侧的测距值大于右侧时,需要捡球机 向右旋转,反之,若右侧的测距值大于左侧时则需要捡球机向左侧旋转,在左右两侧距离传感器的反馈之下,捡球机不断调整自身姿态,直到左右两侧测距值相等,捡球机的行进方向与周界严格垂直,扰动消除完成。
2.5 陀螺仪引导转向
网球捡球机遍历球场到达边界完成姿态调整后,需要完成一系列动作,如图9所示:

图9
每一次捡球机到达边界,需要完成两次90度的转向和一段约75cm的直行完成边界段的运动。该设计采用基于陀螺仪的负反馈控制提升转向过程的精度和可靠性,控制流程图如图10所示:
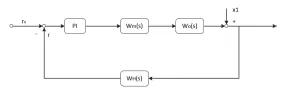
图10
Wm(s)——角度转化为电机转速的传递函数;
Wo(s)——对象的传递函数;
WH(s)——陀螺仪传感器的传递函数。
用实验法对PI调节器进行整定,可以实现对转角的无差调节,整定过程中,要求r的衰减率大于1,防止来回震荡对系统造成不良影响。该过程中陀螺仪的零位漂移可以忽略不计,因零位漂移积累的误差可以通过2.4中的姿态调整进行消除。
捡球机在陀螺仪的负反馈调节下,按照图5所示的轨迹进行转向,即可完成边界部分的转向任务,转向之后再进行一整排的步进,不断循环之后即可实现遍历全场的任务。
3.结论
在上述控制理论的指导下,本设计最终形成了实物,如图11所示,实验证明,在本文所述的控制思想指导下制作的网球捡球机可以很好地完成高自动化程度遍历整个球场的要求,系统运行稳定高效,节省了人力,网球训练过程中繁琐的捡球任务可以很大程度上得到减轻。

图11 实物图
[1]朱建,安必胜,朱向楠.乒乓球捡球机的创新设计及感悟[J].工程技术与应用,2016-7(1):34-36.
[2]柴剑.智能扫地机器人技术的研究与实现[D].西安电子科技大学,2013.
[3]韩良,王德彬,龚焕.智能网球车的研制[J].机电技术,2011,34(1):49-54.
[4]吕腾飞,陆丽,何炳林,等.智能网球捡球机的研制[J].电子世界,2013(12):68-69.
[5]李鹏.一种网球自动捡球机:中国,201620686496.7[P].2016-12-28.
冯嘉伟(1996—),江苏南通人,大学本科,现就读于东南大学吴健雄学院。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
南方农机(2021年3期)2021-02-07
湖北农机化(2020年17期)2020-11-02
机电工程技术(2020年2期)2020-03-26
铁道通信信号(2018年8期)2018-11-10
百科探秘·航空航天(2017年9期)2017-12-31
中南大学学报(自然科学版)(2016年2期)2017-01-19
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
上海铁道增刊(2015年1期)2015-03-23