基于压力反馈的液压型风机低电压穿越控制方法
2017-07-20 14:17陈立娟孔祥东
中国机械工程 2017年13期
艾 超 张 亮 陈立娟 孔祥东
1.河北省重型机械流体动力传输与控制实验室,秦皇岛,0660042.燕山大学机械工程学院,秦皇岛,066004
基于压力反馈的液压型风机低电压穿越控制方法
艾 超1,2张 亮2陈立娟2孔祥东1,2
1.河北省重型机械流体动力传输与控制实验室,秦皇岛,0660042.燕山大学机械工程学院,秦皇岛,066004
结合液压型风力发电机组低电压穿越的控制要求,以实现低电压穿越过程中的功率快速调整为控制目标,提出了一种基于压力控制的低电压穿越控制方法,即在原有低电压穿越控制环的基础上加入压力控制环。通过AMESim和MATLAB/Simulink软件搭建仿真平台进行联合仿真,并依托30 kV·A液压型风力发电机组半物理仿真实验平台进行实验验证。结果表明,所提出的控制方法既可实现功率的快速调整,也能有效地抑制并网转速的瞬态冲击。
风力发电;液压传动;低电压穿越;压力控制;冲击抑制
0 引言
随着风电场规模与装机功率的不断扩大[1-2],风力发电在电网中所占比重也逐步增加,为确保风电机组接入后电力系统运行的可靠性与稳定性[3],低电压穿越能力成为并网型风力发电机组必须具备的能力之一。
针对传统机型低电压穿越控制问题,国内外学者展开了一系列研究。针对双馈型风力发电机组,文献[4]提出了一种基于Crowbar并联动态电阻的双馈风力发电机组低电压穿越方案,通过自适应控制策略以及动态阻值的整定方法实现低电压穿越;文献[5]提出了一种基于滑膜控制的低电压穿越控制策略,通过仿真表明该控制方法与PI控制相比可有效提高系统的性能。针对直驱永磁风力发电机组,文献[6]提出了一种对有功和无功进行协调控制的低电压穿越控制方法,并利用风机的惯性储能来进行低电压穿越;文献[7]提出了一种利用储能系统和制动斩波器的低电压穿越控制方法,利用储能系统控制直流母线电压并抑制输出功率的波动。
液压型风力发电机组作为一种新型机组,其传动形式和结构与传统型机组都有很大的区别,故对液压型风力发电机组的低电压穿越控制仍需要进一步研究。
针对液压型风力发电机组低电压穿越控制研究,ChapDrive公司提出通过节流发热的方法实现液压型风力发电机组低电压穿越控制的构想,但未对其控制特性作具体研究分析[8]。文献[9]提出了一种摆角直接控制的液压型风力发电机组低电压穿越控制方法,通过控制变量马达摆角直接补偿机组输出功率,最终实现低电压穿越;但当电网电压跌落深度较大时,该方法在控制过程中对机组产生的瞬态冲击较大,易导致变量马达转速失稳。
为解决上述技术问题,本文提出了一种基于压力控制的低电压穿越控制方法,通过控制液压系统压力间接控制其传输功率,有效地抑制了低电压穿越过程的瞬态冲击,最终实现低电压穿越过程中有功功率的快速调整。
1 液压型风力发电机组简介
1.1 工作原理简介
液压型风力发电机组[10-12]采用定量泵-变量马达闭式容积液压调速系统,其工作原理如图1所示。
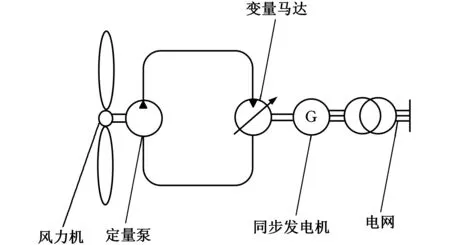
图1 液压型风力发电机组基本原理图Fig.1 The schematic diagram of hydraulic wind turbine
机组在并网前,通过控制变量马达摆角将变量马达转速控制在并网转速要求范围内,在并网之后,控制器在风速波动的情况下确保马达转速始终维持在(1500±6)r/min,即发电频率在(50±0.2)Hz范围之内,实现变转速输入-恒转速输出控制。
1.2 机组低电压穿越基本要求
低电压穿越[13-14](low voltage ride through,LVRT)是风电机组的一项关键技术,具体来说,是指风电场并网点电压在电网故障或扰动作用下发生跌落时机组仍保持并网运行,同时为电网提供一定的无功功率支撑,支持电网电压恢复至正常,最终“穿越”整个低电压时间。
风力发电机组低电压穿越要求如图2所示,
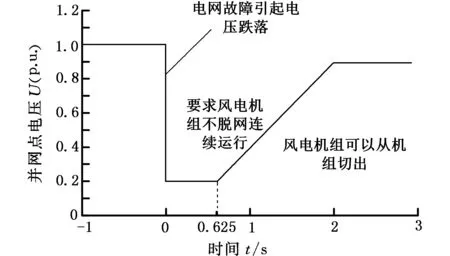
图2 风力发电机组低电压穿越要求Fig.2 The requirements of LVRT
图中p.u.表示标幺值。国家标准[15]对低电压穿越做出了如下规定:①风电场并网点电压跌至20%标称电压时,风电场内的风电机组应保证不脱网连续运行625 ms;②风电场并网点电压在发生跌落后2 s内能够恢复到标称电压的90%,风电场内的风电机组应保证不脱网连续运行。
低电压穿越过程中,机组在宏观上需保证电网故障后的功率平衡与稳定。电压跌落后,发电机输出有功功率减小,此时变量马达瞬态液压传输功率基本不变,直接导致发电机电流过载;其次,发电机产生瞬态脉振电磁转矩,若变量马达输出的液压转矩不能做出与之相应的实时调整,则发电机转速出现严重波动,易导致机组脱网事故。
为解决上述问题,从能量平衡角度,机组需要快速调整液压传输功率,尽量减小发电机过载电流;在脉振电磁转矩干扰下,从机组稳定角度,需控制变量马达(发电机)转速稳定于工频转速,保持并网运行;最后,在电压恢复后,快速提升注入电网的有功功率。
2 数学模型分析
液压型风力发电机组主传动系统由定量泵-变量马达闭式容积回路组成,具体模型如图3所示。
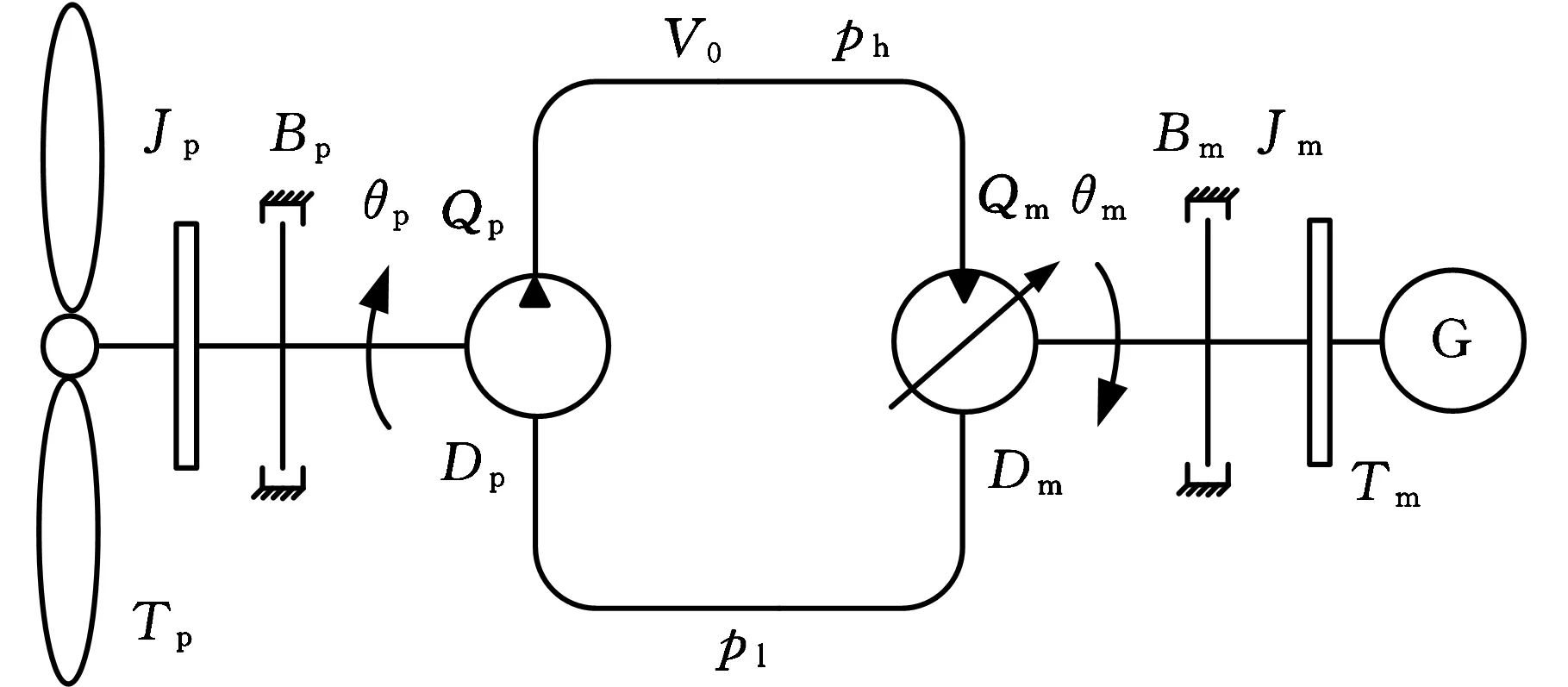
图3 数学模型原理图Fig.3 The schematic diagram of mathematical model
图3中,Tp为作用在液压泵上的驱动力矩,N·m;Jp为液压泵和负载(折算到液压泵轴上)的总惯量,kg·m2;Bp为泵侧黏性阻尼系数,N·s/m;θp为定量泵转角,rad;θm为变量马达转角,rad;Dp、Dm分别为定量泵和变量马达排量,rad/s;ph为高压管路压力,Pa;pl为低压管路压力,Pa;Bm为变量马达侧黏性阻尼系数,N·s/m;Qm为变量马达的吸收流量,m3/rad;V0为定量泵变量马达之间高压管路总容积,m3;Jm为变量马达和负载的总惯量,kg·m2;Tm为电磁转矩,N/m;Qp为定量泵的输出流量,m3/rad。
为实现液压型风力发电机组低电压穿越控制,保证发电机稳定工作于同步转速保持并网,需要对液压传动系统的功率和压力等参量进行快速调整,故需建立液压传动系统数学模型。
基于图3所示的数学模型原理图,得到变量马达角速度数学模型[16]:
(1)
式中,ωm为变量马达角速度,rad/s;ωm0为ωm的初始值;γ为变量马达摆角与其最大摆角比值,γ0为变量马达摆角基准值;Km为变量马达排量梯度,m3/rad;Ct为总泄漏系数,m3/(s·Pa);ph0为ph初始值;βe为有效体积弹性模量,Pa。
系统压力对变量马达摆角的传递函数为
(2)
液压系统传输功率
P=Kmωmγph
(3)
同步发电机的功率平衡方程式为
P=PM+PFe+Pm
(4)
PM=P2+PCu
(5)
式中,PM为电磁功率,W;PFe为铁心损耗功率,W;Pm为机械损耗功率,W;P2为有功功率,W;PCu为铜损耗功率,W。
对于大中容量的同步发电机,机械损耗功率Pm、铁心损耗功率PFe和铜损耗功率PCu较小,一般可以近似认为P=P2,则变量马达输出的液压系统传输功率即为机组输出的有功功率。
由式(2)和式(3)可知,系统压力既是变量马达摆角的直接作用量,也是液压系统传输功率(有功功率)的中间变量,故可通过直接控制系统压力来实现低电压穿越过程中有功功率快速调整的控制需求。
3 低电压穿越控制研究
3.1 控制方法分析
结合上述液压系统数学模型和低电压穿越控制要求,提出了一种基于压力控制的液压型风力发电机组低电压穿越控制方法,其控制框图见图4。
观察组患者术后引流管留置时间、镇痛时间及下床时间均较对照组显著缩短,差异有统计学意义(P<0.05)。见表3。
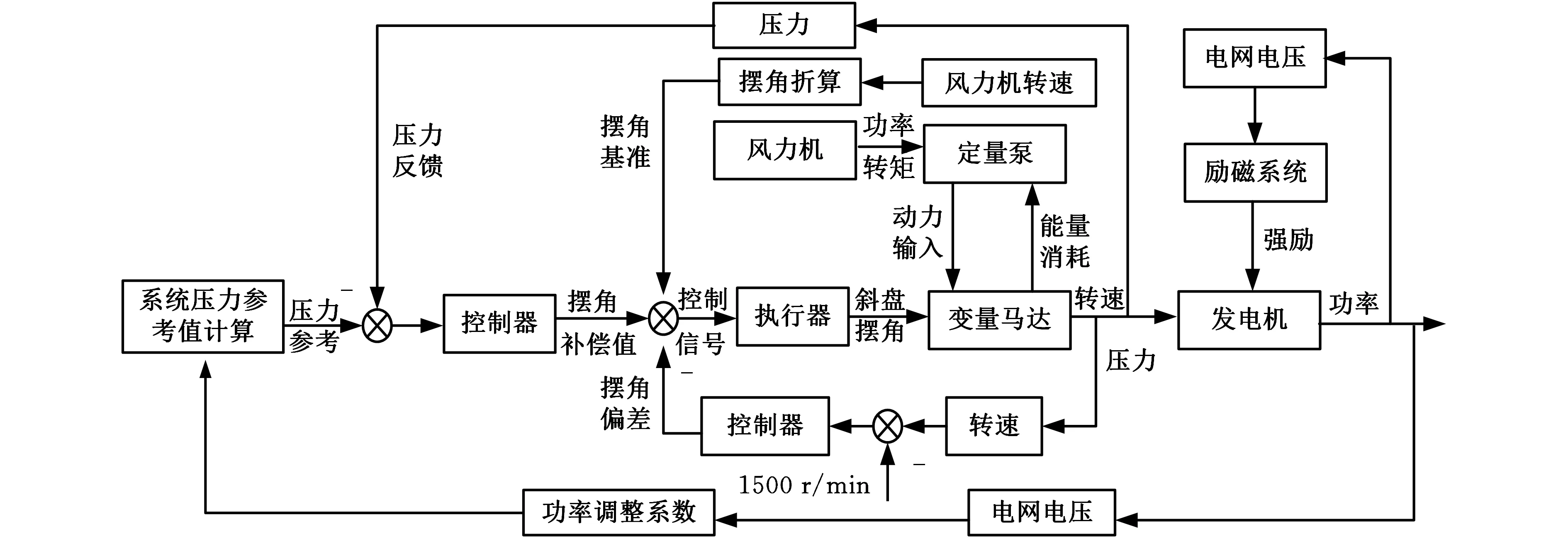
图4 低电压穿越控制框图Fig.4 The control block diagram of LVRT
基于压力控制的低电压穿越控制方法主要包括两个控制环节,即马达转速控制环和系统压力控制环。
马达转速控制环作为机组正常并网运行基础,也是机组进行低电压穿越过程中机组维持正常运行的基本控制环节,该控制环节主要确保变量马达转速稳定于(1500±6)r/min范围内,使机组正常并网运行。
系统压力控制环是机组低电压穿越过程中的主要控制环节,主要由系统压力参考值的给定部分、系统压力反馈部分、比较部分和控制部分组成。系统的压力给定值是根据监控电网电压的状态,通过功率调整系数和系统压力参考值计算得出的;系统的压力反馈、比较部分将低电压穿越过程中系统的实际压力值实时反馈给控制系统的比较环节,与之前计算得到的系统低电压穿越过程中的压力给定值进行比较,得到的偏差值经过控制器折算作用于变量马达摆角,从而实现对液压系统传输功率的快速调整。
当电网电压大幅跌落后,迅速降低液压系统的高压压力,增大定量泵的转速,将剩余功率传递到叶轮,使叶轮加速旋转达到将剩余功率储存于叶轮的目的,这样便使液压系统传递给发电机的功率减小,即减小了作用在转子上的剩余功率。
3.2 控制律研究
当电网电压跌落时,系统产生一定的剩余能量ΔP,需通过投入系统压力控制环,对液压系统传输功率进行快速调整。由数学模型分析可知,系统参考压力
(6)
式中,U为同步发电机输出电压,V;I为同步发电机输出电流,A;cosφ为功率因数;γ1为变量马达摆角补偿值。
将系统参考压力与其实际压力进行比较,压力偏差折算为变量马达摆角补偿值,则有
(7)
由上述流量平衡方程可知,变量马达摆角基准值的数学模型为
(8)
式中,ωm为定量泵角速度。
以变量马达稳速输出1500 r/min为基准,将转速偏差折算为变量马达摆角实施补偿控制,具体数学模型可表示为
(9)
综上所述,机组在整个低电压穿越过程中的具体控制思想如下:首先,通过马达转速控制环节抑制发电机在低电压穿越过程中的转速波动,保证发电机始终稳定在并网转速,这是机组可以进行低电压穿越的基础;其次,在低电压穿越过程中,通过系统压力控制环,控制系统压力对液压系统传输功率进行调整,并在发电机励磁系统输出无功功率支撑电网恢复到额定电压的90%时,按照10%额定功率每秒的速度,增加系统压力,实现液压系统输出功率即发电机发电功率的快速回升,最终实现机组低电压穿越控制。
4 仿真与实验研究
依托燕山大学30 kV·A液压型风力发电机组半物理模拟实验平台进行实验研究,该实验平台主要由风力机模拟系统、液压主传动系统、并网控制系统和控制采集系统四部分组成。其中,风力机模拟系统中的变频器控制变频电机模拟风轮的转动情况;液压传动系统将输入的机械能转化为液压能并带动同步发电机发电;并网控制系统中的电网模拟器模拟电网电压跌落情况,并网柜控制机组顺利并网;控制采集系统实时监控机组的运行状态,并协调控制机组的各变量。采用AMESim和MATLAB/Simulink软件搭建仿真平台,对基于压力反馈的低电压穿越控制方法进行仿真和实验研究。实验平台和仿真平台分别见图5和图6,仿真参数设定见表1。
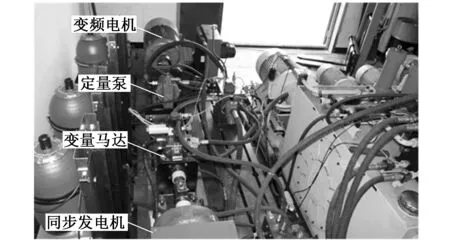
图5 实验平台Fig.5 Experiment platform

图6 低电压穿越控制仿真平台Fig.6 The simulation platform of LVRT

1风力机转动惯量(kg·m2)4002定量泵排量(mL/r)633变量马达最大排量(mL/r)404油液体积弹性模量(Pa)743×1065总泄漏系数(m3/(s·Pa))2.8×10-116三相额定功率(V·A)313007额定母线电压(V)4008额定发电机电流(A)43.39额定励磁电流(A)2.710额定频率(Hz)5011发电机负载转动惯量(kg·m2)0.45
4.1 低电压穿越仿真分析
在1 s时刻,仿真模型模拟电网电压三相对称跌落,跌落深度为其额定值的80%、50%和20%,持续1s,仿真结果如图7所示。
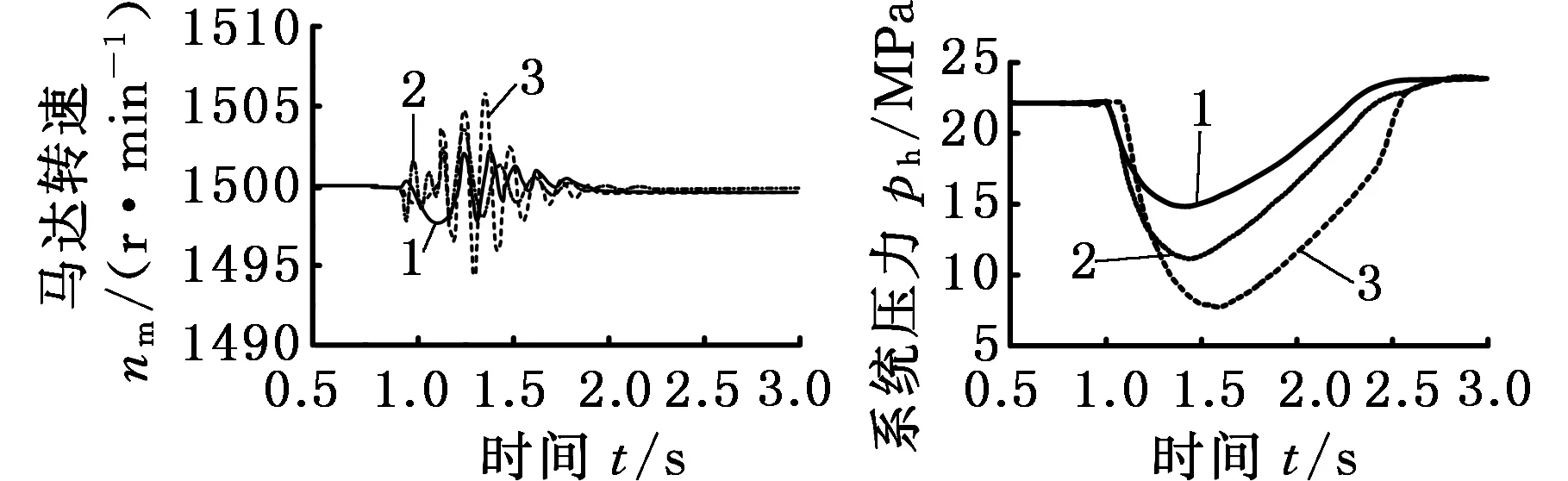
(a)马达转速 (b)系统压力
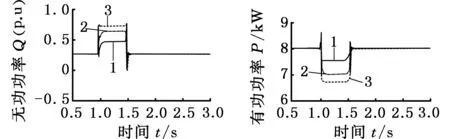
(c)无功功率 (d)有功功率

(e)定子电压有效值 (f)定子电流有效值1.电压跌落20% 2.电压跌落50% 3.电压跌落80%图7 低电压穿越仿真结果Fig.7 Simulation results of LVRT
由图7仿真曲线可知,随着电压跌落深度的加大,系统压力和有功功率的跌落深度也增大,对应的同步发电机定子电压有效值降低,定子电流有效值增大。可见随着电网电压跌落程度的增大,对液压系统压力、马达转速的控制要求更加苛刻。
由图7a仿真曲线可知,当电网电压跌落时,采用基于压力控制的低电压穿越控制方法,可以保证变量马达(发电机)转速稳定在(1500±6)r/min范围内,确保发电机并网运行;由图7b~图7d仿真曲线可知,电压跌落时控制系统压力快速下调,使得有功功率(液压传输功率)下降,同时励磁系统控制发电机输出无功功率支撑电网恢复,在故障切除电压恢复后,有功功率随着控制压力的调整逐步回升,支撑电网恢复至故障前状态;由图7e和图7f仿真曲线可知,电网电压跌落时,直接导致励磁同步发电机定子电压跌落,同步发电机的定子电流上升,通过对液压系统压力的快速调整,使得发电机的定子电流有效值稳定在2p.u.以内,基本维持在发电机过载电流承受范围内,实现了机组在低电压穿越过程中对同步发电机的有效保护。
4.2 低电压穿越实验分析
针对提出的控制方法进行实验研究,模拟低电压穿越过程中液压传输功率快速调整过程。模拟电压跌落深度为50%的相应实验结果如图8所示。

(a)系统压力 (b)马达转速
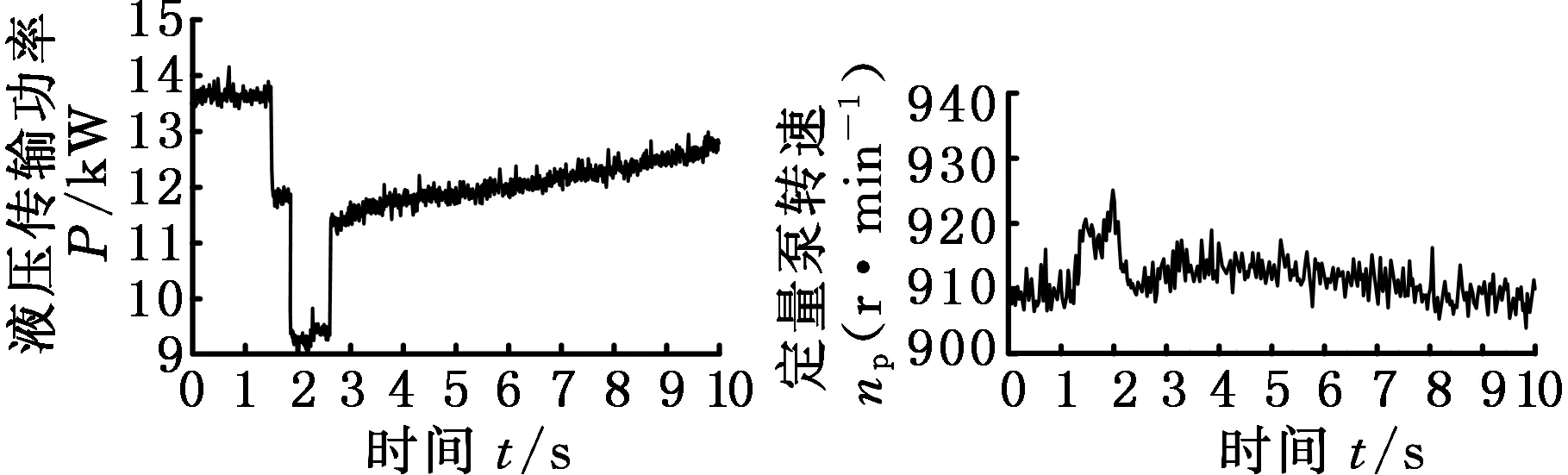
(c)液压传输功率 (d)定量泵转速
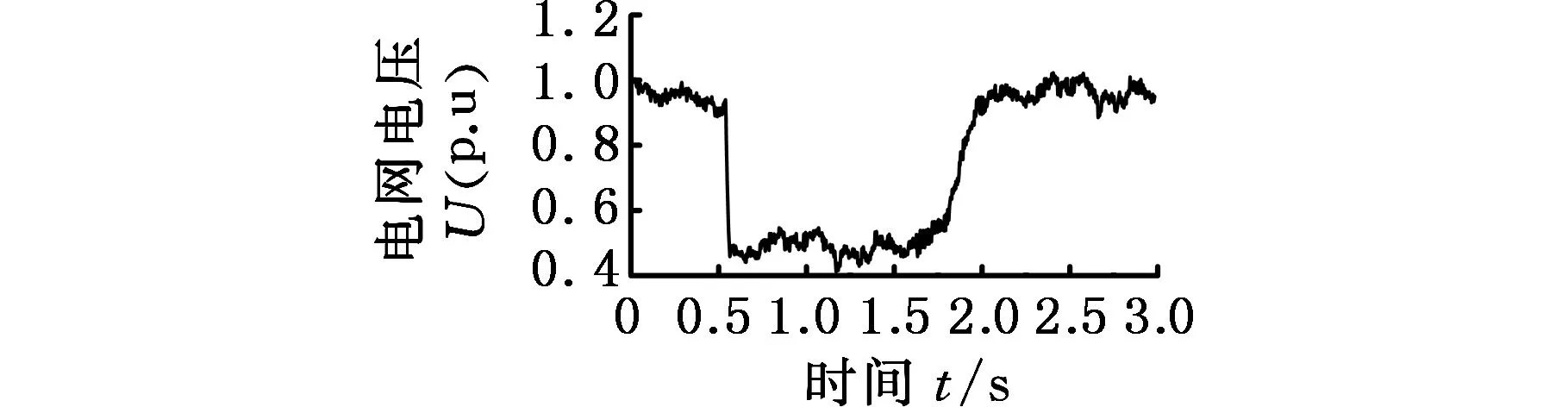
(e)电网电压图8 低电压穿越实验结果Fig.8 Experiment results
由图8实验结果可知,低电压穿越过程中,通过直接控制系统压力可以实现液压传输功率即机组有功功率的快速调整,使液压传输功率1 s左右降至50%左右;同时确保马达转速(发电机转速)波动都在±6 r/min范围内,保证发电机不脱网运行。
为进一步验证基于压力反馈的低电压穿越方法的有效性,实验过程中设定电网电压跌落80%,并与直接摆角控制的低电压穿越控制方法[9]进行比较,如图9所示。
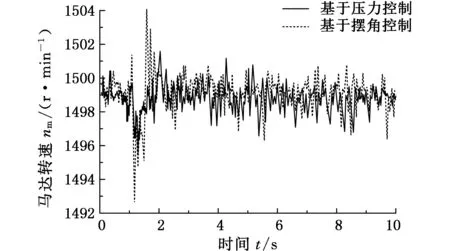
(a)马达转速
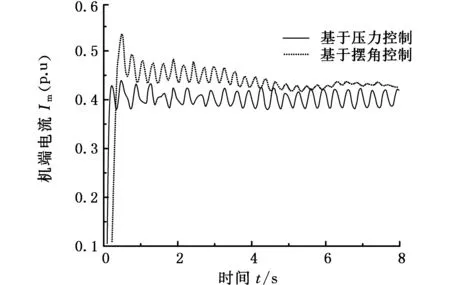
(b)机端电流图9 实验结果对比图Fig.9 Comparison between two control methods
由图9对比分析可知,当电压跌落深度较大(超过60%)时,本文所采用的控制律与采用直接摆角控制[9]相比,基于压力的补偿控制策略有效地抑制了电压跌落过程中变量马达(发电机)的转速波动,降低了机端过载电流。
5 结论
(1)基于压力控制的低电压穿越控制方法有效抑制了电压跌落过程中变量马达的转速波动,使发电机稳定于同步转速、维持机组的并网运行,同时实现了在较短时间内对机组瞬态有功功率的调整。
(2)得出基于压力控制的低电压穿越方法的动态响应参数,所提出的方法可以维持机组在低电压穿越过程中并网运行。
[1] 中国可再生能源学会风能专业委员会(CWEA). 2015年中国风电装机容量统计[J]. 风能, 2016(2):48-63. Chinese Wind Energy Association (CWEA). Statistics of Wind Power Installed Capacity in China in 2015[J]. Wind Energy, 2016(2):48-63.
[2] SILVA P,GIUFFRID A,FERGNANI N,et al. Performance Prediction of a Multi-MW Wind Turbine Adopting an Advanced Hydrostatic Transmission [J]. Energy,2014,64:450-461.
[3] 匡洪海,吴政球,何小宁,等. 提高多机风力发电并网系统稳定性的研究[J]. 热能动力工程,2011,26(2):238-243. KUANG Honghai,WU Zhengqiu,HE Xiaoning,et al. Research on Improving the Stability of Wind Power Generation Grid Connected System[J]. Journal of Engineering for Thermal Energy and Power,2011,26(2):238-243.
[4] 张曼,姜惠兰. 基于撬棒并联动态电阻的自适应双馈风力发电机低电压穿越[J]. 电工技术学报,2014,29(2):271-278. ZHANG Man,JIANG Huilan. Adaptive Low Voltage Ride-through of Doubly-fed Induction Generators Based on Crowbar with a Parallel Dynamic Resistor[J]. Transactions of China Electrotechnical Society,2014,29(2):271-278.
[5] SAAD N H, SATTAR A A, MANSOUR E A M. Low Voltage Ride through of Doubly-fed Induction Generator Connected to the Grid Using Sliding Mode Control Strategy[J]. Renewable Energy, 2015,80:583-594.
[6] 李和明,董淑惠,王毅,等. 永磁直驱风电机组低电压穿越时的有功和无功协调控制[J]. 电工技术学报,2013,28(5):73-80. LI Heming,DONG Shuhui,WANG Yi,et al. Coordinated Control of Active and Reactive Power of PMSG-based Wind Turbines for Low Voltage Ride Through[J]. Transactions of China Electrotechnical Society,2013,28(5):73-80.
[7] RAJKUMAR S, SUGANTHI S T. A Hybrid Control Scheme for Fault Ride-through Capability Using Line-side Converter and an Energy Storage System for PMSG Wind Turbine Systems[J]. International Electrical Engineering Journal (IEEJ), 2014,5(4):2078-2365.
[8] PETER C,MICHAEL N. A Method and System for Connecting a Wind Turbine System to an Electric Grid: EP, 2481915A1 [P].2012-08-01.
[9] 孔祥东,艾超,闫桂山,等. 液压型风力发电机组低电压穿越控制方法研究[J]. 中国机械工程. 2014,25(16):2137-2142. KONG Xiangdong,AI Chao,YAN Guishan,et al. Research on Control Method of Low Voltage Ride through for Hydraulic Wind Turbine[J]. China Mechanical Engineering,2014,25(16):2137-2142.
[10] LAGUNA A J, DIEPEVEEN N F B, WINGERDEN J W V. Dynamic Analysis of Fluid Power Drive-trains for Variable Speed Wind Turbines: a Parameter Study[J]. IET Renewable Power Generation, 2014,8(4):398-410.
[11] MORTENSEN K A,HENRIKSEN K H. Efficiency Analysis of a Radial Piston Pump Applied in a 5MW Wind Turbine with Hydraulic Transmission[D]. Aalborg, Denmark: Aalborg University,2011.
[12] 孔祥东,艾超,王静. 液压型风力发电机组主传动控制系统综述[J]. 液压与气动,2013(1):1-7. KONG Xiangdong,AI Chao,WANG Jing. A Summary on the Control System of Hydrostatic Drive Trian for Wind Turbines[J]. Chinese Hydraulics & Pneumatics, 2013(1):1-7.
[13] ABDEL-BAQI O,NASIRI A. A Dynamic LVRT Solution for Doubly FED Induction Generators[J]. IEEE Transactions on Power Electronics, 2010,25(1):193-196.
[14] HOWLADERA M, SENJYU T. A Comprehensive Review of Low Voltage Ride Through Capability Strategies for the Wind Energy Conversion Systems[J]. Renewable & Sustainable Energy Reviews, 2016,56:643-658.
[15] 全国电力监管标准化技术委员会. 风电场接入电力系统技术规定:GB/T 19963-2011[S]. 北京:中国标准出版社,2011. State Electricity Regulatory Commission. Technical Rule for Connecting Wind Farm to Power System:GB/T 19963-2011[S]. Beijing: Standards Press of China,2011.
[16] 艾超. 液压型风力发电机组转速控制和功率控制研究[D]. 秦皇岛:燕山大学,2012. AI Chao. Research on Speed Control and Power Control of Hydraulic Type Wind Turbine[D]. Qinhuangdao: Yanshan University, 2012.
(编辑 袁兴玲)
Control Method of LVRT for Hydraulic Wind Turbines Based on Pressure Feedback
AI Chao1,2ZHANG Liang2CHEN Lijuan2KONG Xiangdong1,2
1.Hebei Heavy Machinery Fluid Power Transmission and Control Laboratory, Qinhuangdao, Hebei, 066004 2.College of Mechanical Engineering, Yanshan University, Qinhuangdao, Hebei, 066004
Combined with the control requirements of hydraulic wind turbine LVRT, in order to realize power rapid adjustment in the processes of LVRT, a control method of LVRT was proposed based on pressure control, namely adding pressure control loop in the original LVRT control loop. Simulations were carried out based on AMESim and MATLAB/Simulink, and control method was verified by the experiments on the 30 kV·A hydraulic wind turbine platform. Finally, it shows the proposed control method may realize the fast adjustments of power, and effectively restrain the grid-connected speed impacts, which lays a theoretical foundation for the engineering applications of the hydraulic wind turbines.
wind power generation; hydraulic transmission; low voltage ride through(LVRT); pressure control; impact suppression
2016-09-02
国家自然科学基金资助项目(51405423);河北省高等学校科学技术研究重点项目(ZD2016114);燕山大学研究生创新项目(2017XJSS008)
TH137
10.3969/j.issn.1004-132X.2017.13.005
艾 超,男,1982年生。燕山大学机械工程学院副教授、博士。主要研究方向为流体传动与控制。E-mail:aichao@ysu.edu.cn。张 亮,男,1991年生。燕山大学机械工程学院硕士研究生。陈立娟,女,1989年生。燕山大学机械工程学院硕士研究生。孔祥东,男,1959年生。燕山大学副校长、教授、博士研究生导师。
猜你喜欢
能源工程(2022年1期)2022-03-29
防爆电机(2022年1期)2022-02-16
作文周刊·小学三年级版(2020年24期)2020-07-17
电子制作(2017年1期)2017-05-17
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
棋艺(2016年4期)2016-09-20
燃气轮机技术(2014年4期)2014-04-16
航天器工程(2014年5期)2014-03-11
少年科学(2014年2期)2014-02-24