
带式夹持输送对虾开背机的设计与试验
2017-11-13 01:59张秀花王利光弋景刚王泽河
农业工程学报 2017年20期
张秀花,王利光,弋景刚,王泽河,王 颉
带式夹持输送对虾开背机的设计与试验
张秀花1,王利光1,弋景刚1,王泽河1,王 颉2
(1. 河北农业大学机电工程学院,保定 071001; 2. 河北农业大学食品科技学院,保定 071001)
为适应不同尺寸对虾开背以及寻找开背的优化参数,设计带式夹持输送对虾开背机,并对该方案的夹持与输送机构、夹持V角调节机构、限深与导正部分进行了详细设计。在单因素试验的基础上,以响应面优化法安排三因素三水平的正交试验,探求了夹持V角、输送速度、切割转速3个关键参数对切口长度、切口对称度、切口深度、切口光滑度4个评价指标的影响规律,利用Design-Expert8.06软件对试验结果进行方差分析,建立了评价指标与各影响因素的数学回归模型,并进行响应面分析,得到带式对虾开背机的最佳工艺参数组合为:夹持V角33°,输送速度285 mm/s,切割转速1 250 r/min。选取去头预处理、腹部六节完整的对虾在带式对虾开背机上以最佳参数组合进行试验验证,试验结果为:切口长度成功率92.5%,切口对称度成功率90.83%,切口深度成功率90.0%,切口光滑度成功率93.3%,与预测值误差绝对值均小于5%。验证试验结果表明带式对虾开背机性能可靠稳定,各项指标均满足要求。
机械化;设计;优化;对虾;对虾开背机;带式夹持输送
0 引 言
对虾剥壳机械化加工流程主要包括:清洗→分级→排序定向→去头→开背→剥壳[1-6],开背是其中一项重要的环节,开背效果和质量直接影响机械化剥壳能否实现和剥壳后的虾仁品质[7-12]。研制实用可靠的对虾开背装置对推动中国对虾机械化加工进程具有重要意义。
国外关于虾类加工技术的研究起步较早,开背装置按夹持方式可分为弹片夹持式、对辊夹持式、转盘式三类。Douglas[13]发明的弹片夹持式-圆弧形滑道对虾开背装置,利用弹片夹持虾体保持背朝上的姿态沿圆弧形滑道移动,开背刀和开腹刀分别固定在滑道上下侧,可同时完成对虾开背、开腹、去肠线工作。Derrell Sawyer[14]发明的仿形弹片夹持式对虾开背装置,两仿形弹片构成类似虾体体型的夹持空间输送虾体,旋转圆盘刀在对虾的背部切出一条切口;该装置结构紧凑,夹持稳定,切割深度可控。Wallace[15]发明的对辊定向-弹片夹持式对虾开背机,增加了虾体头尾与背腹定向功能。Douglas[16]发明的对辊夹持式对虾开背装置,采用上开背下开腹圆盘刀结构,夹持输送采用竖直布置的输送对辊,结构紧凑,一个动力源集中控制,不足之处是输送对辊的间隙一定,容易对虾体造成挤压损伤,且开背圆盘刀布置在竖直的对辊之间,圆盘刀的调整和拆装困难。Arthur Grammer等[17]发明的轮式-转盘对虾开背机,由轮式转盘夹持与输送和高速圆盘刀开背。美国Jonsson[18]公司生产的夹具转盘式对虾开背剥壳一体机,利用虾体的弯曲特性与循环轮外侧的贴合来保证切口的深度,切割深度调整方便。
国内关于对虾加工设备的研制起步较晚,目前国内市场上并未见到自主研制的对虾开背设备,仅有少量文献,主要代表有彭德权和河北农业大学2个团队。彭德权发明的一种虾开肚机[19],包括中心输送带、左右输送带及盘状切刀,中心输送带上方设有盘状切刀。3条输送带协同完成对虾的输送,输送过程平稳。彭德权发明的另一种虾开背除肠剥壳机[20-21]的结构和Jonsson的转盘式对虾开背剥壳一体机相同,市场上均未见到国产化的样机。
河北农业大学发明的一种对虾开背去头装置,其主体采用长短两条V型槽输送进给、固定刀片切除虾头,压紧轮、弹性仿形板和固定开背刀联合进行开背[22];加工效率高,输送平稳,定位准确,但是开背所需压紧力较大易对虾体造成损伤。河北农业大学发明的另一种轮槽输送式对虾开背装置[12, 23],该装置利用摩擦进行对虾背腹定向,两轮凹槽形成夹持空间,圆盘刀开背;不足之处是上料不便,效率低,其加工能力为10~30 kg/h。在前期研究的基础上,本文以期研制一种带式夹持输送对虾开背机[24]。
1 整机结构与工作原理
开背机主要由夹持与输送机构、夹持V角调节机构、刀片高度微调机构、限深与导正部分组成。夹持与输送机构两端通过销轴安装在机架上;夹持V角调节机构安装在夹持与输送机构的两端,用以调节夹持与输送机构形成的V角;刀片高度微调机构安装在机架上,可方便的调整开背圆盘刀的高低达到控制切深的目的;限深与导正部分安装在刀片高度微调机构上,可有效的保证切深与切口的对中性。开背机三维模型如图1所示,主要参数如表1所示。
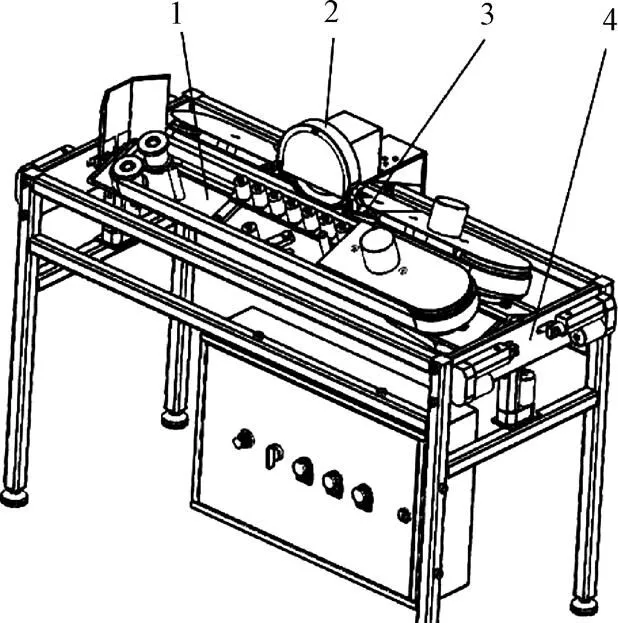
1.夹持与输送机构 2.刀片高度微调机构 3.限深与导正部分 4.夹持V角调节机构
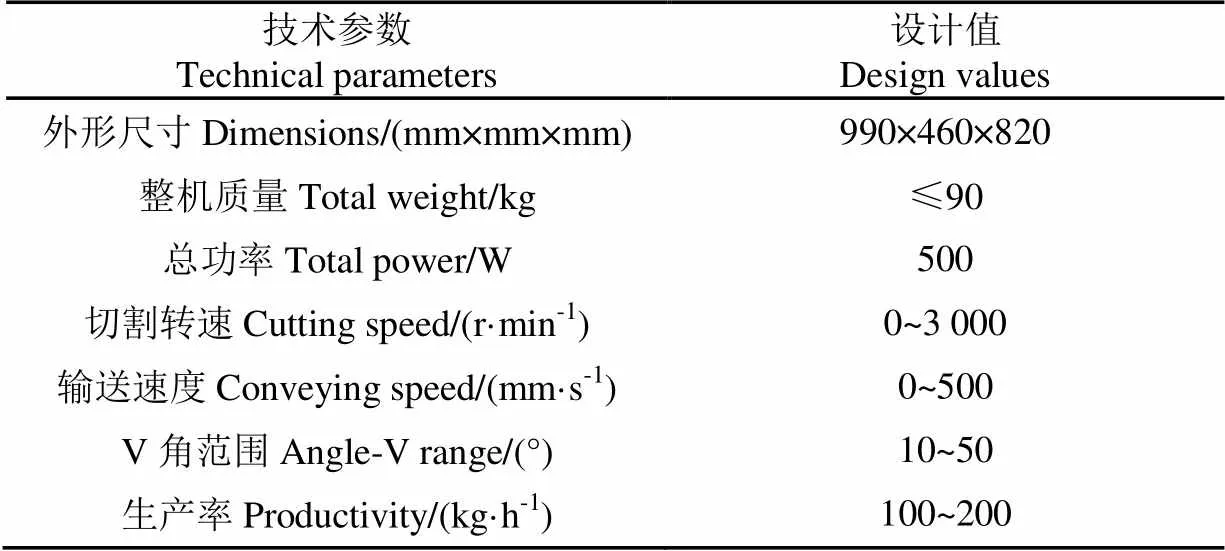
表1 带式对虾开背机主要技术参数
如图1所示,去头对虾由人工以背朝上、腹朝下的姿态由V型夹持空间的一端喂入,虾体卡在夹持V角内,输送带夹持着虾体保持上料时的姿态向前输送,上置式的高速圆盘刀在虾体的背部切出一条一定深度的切口,切口作为虾壳的薄弱环节,为后续的机械化脱壳创造条件,完成开背的虾体最后由出料口落下进行收集。
2 关键零部件设计
2.1 夹持与输送机构的设计
夹持与输送机构的基本要求是:完成虾体的连续稳定夹持输送且能保证开背时的正确姿态,降低对虾体的夹持损伤。设计的夹持与输送机构2套独立的皮带传送机构组成,如图2所示。一套独立的皮带传送机构中,一个主动带轮和2个从动带轮分别安装在长方形皮带底座的两端,输送带为内层片基带外层发泡海绵,安装时片基带朝里、发泡海绵朝外。

1.从动带轮 2.内侧张紧轮 3.外侧张紧轮 4.张紧弹簧 5.主动带轮 6.皮带底座 7.底座销轴 8.步进电机 9.内侧张紧轮支架 10.输送带 11.外侧张紧轮悬臂
外侧张紧轮安装在张紧轮悬臂上,张紧弹簧通过拉动张紧轮悬臂对输送带起到张紧的作用;内侧成排布置的张紧轮既可张紧输送带又可导正输送带,通过对开背工位的导正与张紧,有利于虾体的稳定夹持与平稳输送。整个输送带由步进电机经具有传动比的同步带轮驱动。2套独立的皮带传动机构通过各自两端的销轴安装在机架上,2套皮带传动机构对称布置且沿各自销轴转过一定的角度,使得对称的2条皮带构成V型的夹持空间,该V型夹持空间用于夹持待开背的虾体。
2.2 夹持V角调节机构的设计
为了适应尺寸不同的对虾及探求最佳的夹持V角,设计了一种夹持V角调节机构。该夹持V角调节机构如图3所示,主要由间隙补偿电推杆、滑块、角度调节电推杆、弯曲摇臂、底座销轴、皮带底座等组成。
1.间隙补偿电推杆 2.滑块 3.角度调节电推杆 4.弯曲摇臂 5.底座销轴 6.皮带底座
角度调节电推杆推动滑块上下滑动,弯曲摇臂转动,在弯曲摇臂力矩的作用下驱动皮带底座转过一定的角度,进而实现对称两皮带形成的夹持V角的调整。间隙补偿电推杆推动底座销轴左右移动,进而调整对称两皮带传动机构的间隙,角度调节电推杆与间隙补偿电推杆协同动作实现夹持V角的调节,并保持V型夹持空间底部的间隙保持不变。
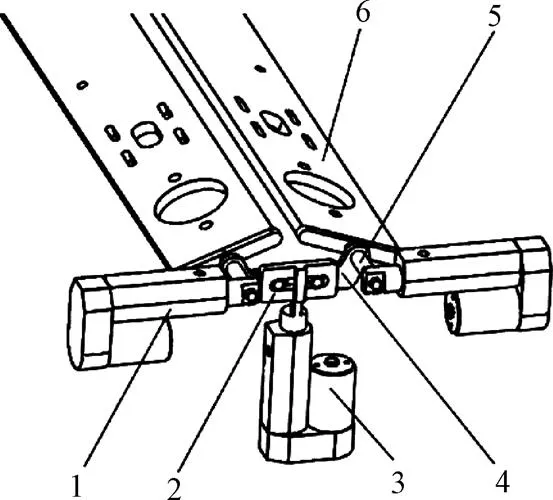
2.3 限深与导正部分的结构设计
限深与导正部分的结构如图4所示,限深压板与倒U形导正压板共同安装在电机护罩上,可以通过旋钮来调节限深压板与倒U型导正压板相对于刀片的高度。圆盘刀穿过限深压板的长槽,通过控制刀尖漏出的高度来控制切口的深度。倒U形导正压板一端收口大一端收口小,以一定角度布置在V型夹持空间的正上方,形成沿虾体运动方向收敛的倒U型楔形空间,去头后的虾体由V型夹持空间夹持保持背朝上、腹朝下的姿态向开背工位输送。由于虾体自然弯曲呈弓起的状态,倒U型的楔形空间可以起到压直和导正虾体的作用。在切割开背的全过程中,限深压板压紧虾体,可以有效的保证切深与切口对中性。
1.限深压板 2.旋钮 3.倒U形导正压板 4.V型夹持空间
3 开背性能试验
3.1 试验设备与材料
主要仪器设备:万能角度尺(精度:0.02°);游标卡尺(精度0.02 mm);课题组研制的带式对虾开背机。试验材料为2016年9月份采购的级别为70~80只/kg的鲜活南美白对虾,剔除体节不完整的虾体,然后对虾体进行去头预处理,去头预处理时仅切除虾体的头胸部,切口光滑,同时保证虾体六节腹部的完整性。
3.2 试验方法
针对上述去头预处理的对虾,以切口长度成功率、切口对称度成功率、切口深度成功率、切口光滑度成功率作为衡量开背效果的4个指标,以不同的夹持V角、不同的输送速度、不同的切割转速为影响因素,取40只/组的对虾在带式对虾开背机上进行二次回归正交试验。
3.2.1 试验指标
1)切口长度:切口的长度越长,越有利于机械剥壳,但是由于虾体第5节和第6节的体节宽度已经开始变的很小,且背部已成尖状,不仅给开背带来更大的困难,还易使虾仁破碎不完整。综合考虑切口长度为5节或6节时,开背长度成功。
式中1为切口长度成功率,%;1为切口长度为5节或6节的对虾个数,5为开背试验中对虾的总个数。
2)切口对称度:切口对背部中央的偏离程度越小,越有利于机械剥壳,且剥壳后的虾仁品质越高。综合考虑有5节或6节的切口在虾体背部中央,切口对称度成功。
式中2为切口对称度成功率,%;2为有5节或6节切口在背部中央的对虾个数。
3)切口深度:切口深度至虾体背部虾线位置时,开背刀对虾仁主体部分的损伤最小,但是切口深度正好至虾线位置很难保证。切口的深度越大,机械剥壳过程中虾仁损伤越严重。取切口深度最大的部位作为观察的对象,当切口深度小于该节虾体高度的三分之一时,切口深度成功。
式中3为切口深度成功率,%;3为切深最大部位小于该节虾体高度三分之一的对虾的个数。
4)切口光滑度:切口越光滑,剥壳后虾仁的品质越高。经开背机开背的虾体,虾体背部的切口并不像手工开背那样光滑。目前对虾开背切口光滑度不好定量测评,也没有一个统一的评定标准。参阅关于鱼虾类加工和食品品质评价方面的文献[25-26],采用感官评价。感官评价指标表2,将切口的光滑度可分为5个等级,当切口的光滑程度达到前3个等级时,切口的光滑度成功。
式中4为切口光滑度成功率,%;4为切口光滑度达到前3个等级的对虾个数。
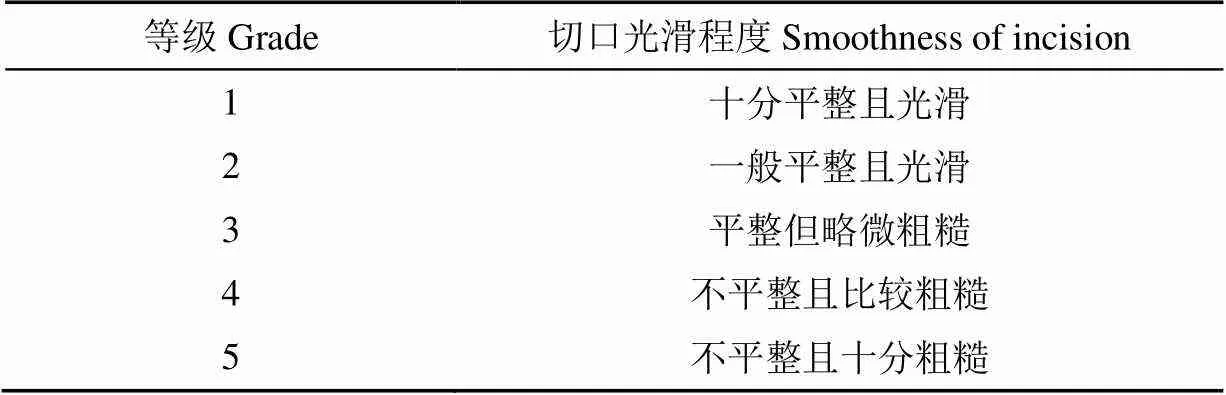
表2 感官评价指标
3.2.2 试验因素
前期试验表明,影响开背质量的因素主要包括:夹持V角、输送速度与切割转速。
1)夹持V角
由于虾背部较虾腹部稍宽的特性,使得虾体腹部各体节呈现类似V形的楔角,由前期虾体楔角测量结果[27]可知,虾体楔角从第一节到最后一节变化明显,当夹持V角大于第一节楔角时,对虾不能被稳定的夹持定位,当夹持V角小于第六节虾体楔角时,六节虾体均可被稳定的夹持,但此时上料困难,综合前期夹持V角单因素预备试验结果,选取30°~40°的夹持V角进行优化试验。
2)输送速度
当夹持皮带的输送速度很低时,开背加工的效率低,当输送速度很高时,开背机的平稳性下降导致开背效果又有所降低,综合前期输送速度单因素预备试验结果,选取173~345 mm/s的输送速度进行响应面试验。
3)切割转速
不同切割转速下的圆盘刀对虾体的切割力有明显差异,直接影响切割过程的平稳性,对切口的光滑程度影响较大,综合考虑前期切割转速单因素预备试验结果,选取1 000~1 400 r/min的切割转速进行优化试验。
3.2.3 试验设计
根据上述评价指标的确定与试验因素的选取,以夹持V角1、输送速度2、切割转速3为影响因素,以切口长度成功率1、切口对称度成功率2、切口深度成功率3、切口光滑度成功率4共4个评价指标为响应值,各因素水平的编码如表3所示,采用Design-Expert8.06软件,以Box-Behnken design响应面优化方法安排三因素三水平的正交试验[28-30],试验方案及相应结果如表4。取17组、40只/组的对虾,根据试验方案在带式对虾开背机上进行开背试验,同时组织4名试验人员分别对4个指标进行评定和统计。
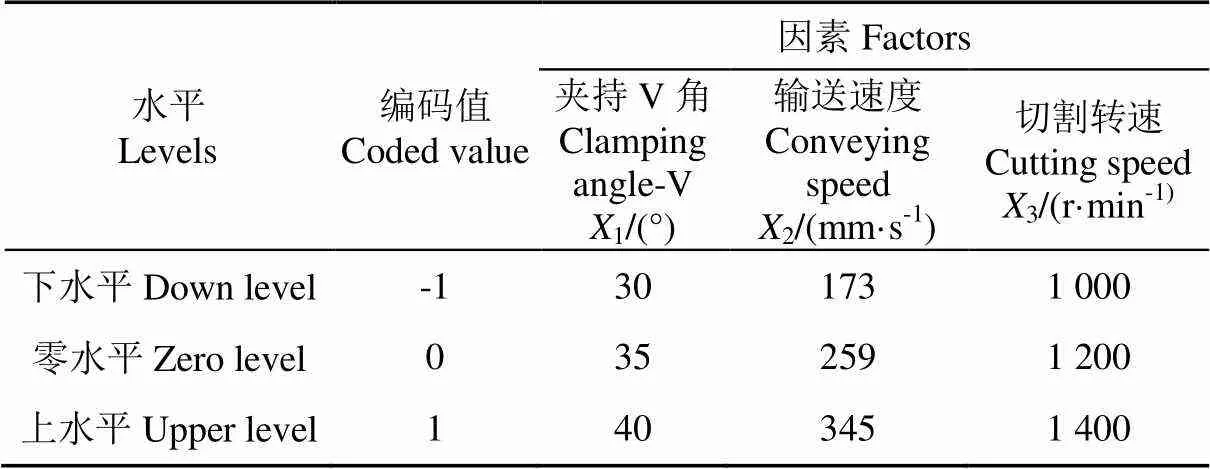
表3 因素水平编码表
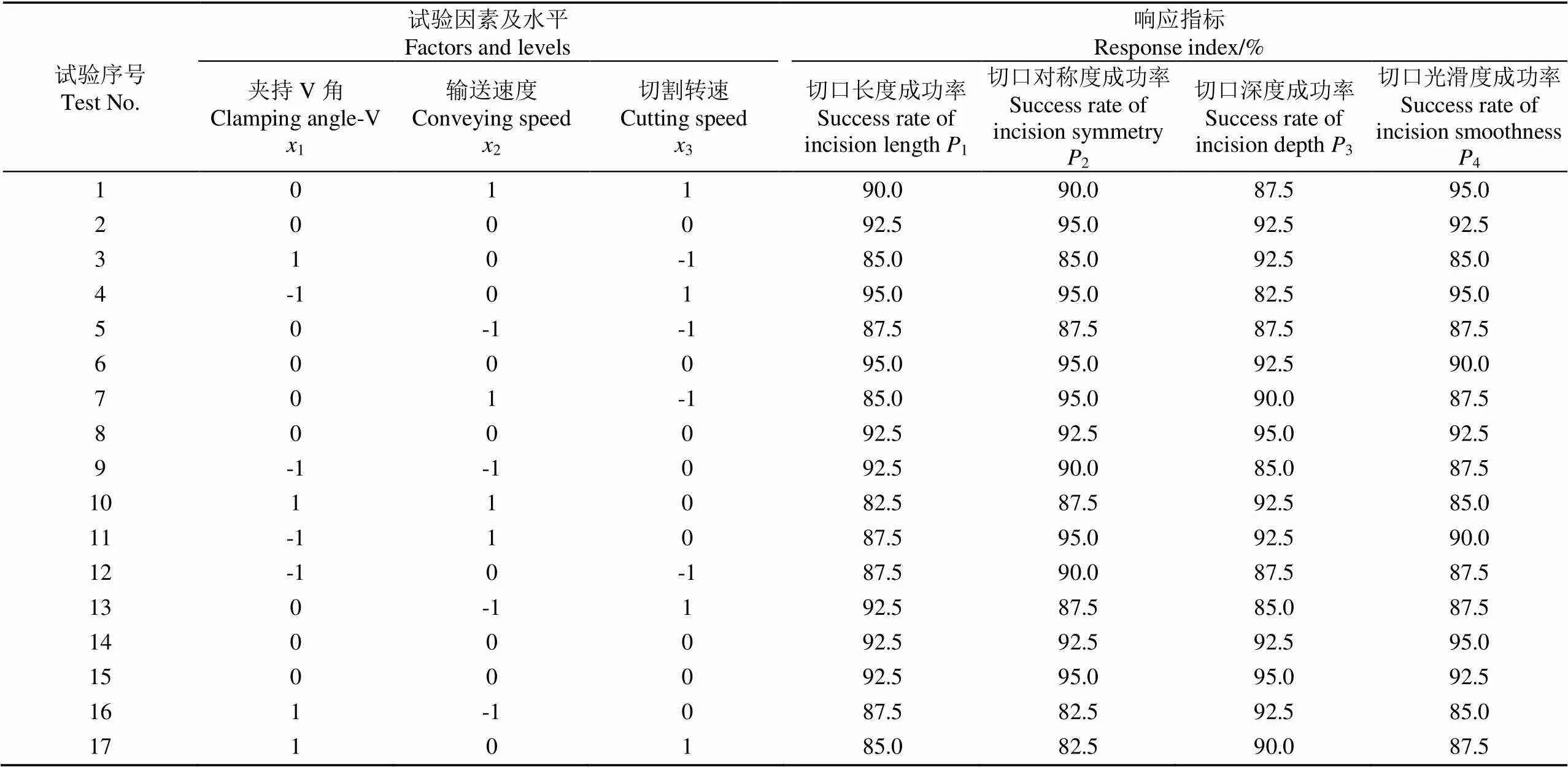
表4 Box-Behnken试验方案及相应结果
3.3 回归模型建立与显著性分析
根据表4中的试验结果,利用Design-Expert8.06软件进行多元回归拟合与方差分析,方差分析结果见表5,建立切口长度成功率1、切口对称度成功率2、切口深度成功率3、切口光滑度成功率44个观察指标与夹持V角、输送速度、切割转速三影响因素间的二次多项式回归数学模型,同时剔除不显著项,得到优化后的数学模型如式(5)。
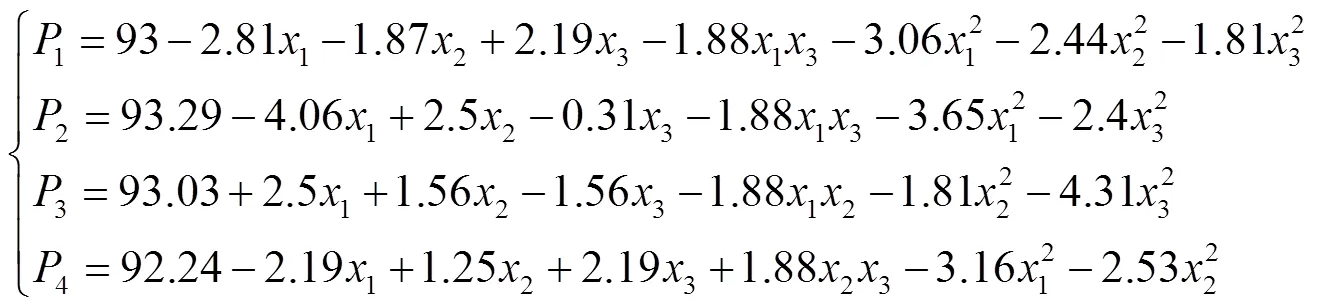
式中1为夹持V角,2为输送速度,3为切割转速,取值范围均为−1~1。
通过表5的分析结果可知,切口长度成功率1、对称度成功率2、深度成功率3、光滑度成功率4共4个指标的回归数学模型的值分别为0.000 4、0.000 8、0.001 3、0.005 2(均小于0.01),表明4个模型的显著性极好;其失拟项的值分别为0.402 8、0.367 8、0.541 3、0.770 2(均大于0.05),说明4个模型在试验参数范围内,拟合程度较高,说明该模型可以预测带式对虾开背机的最佳工作参数。
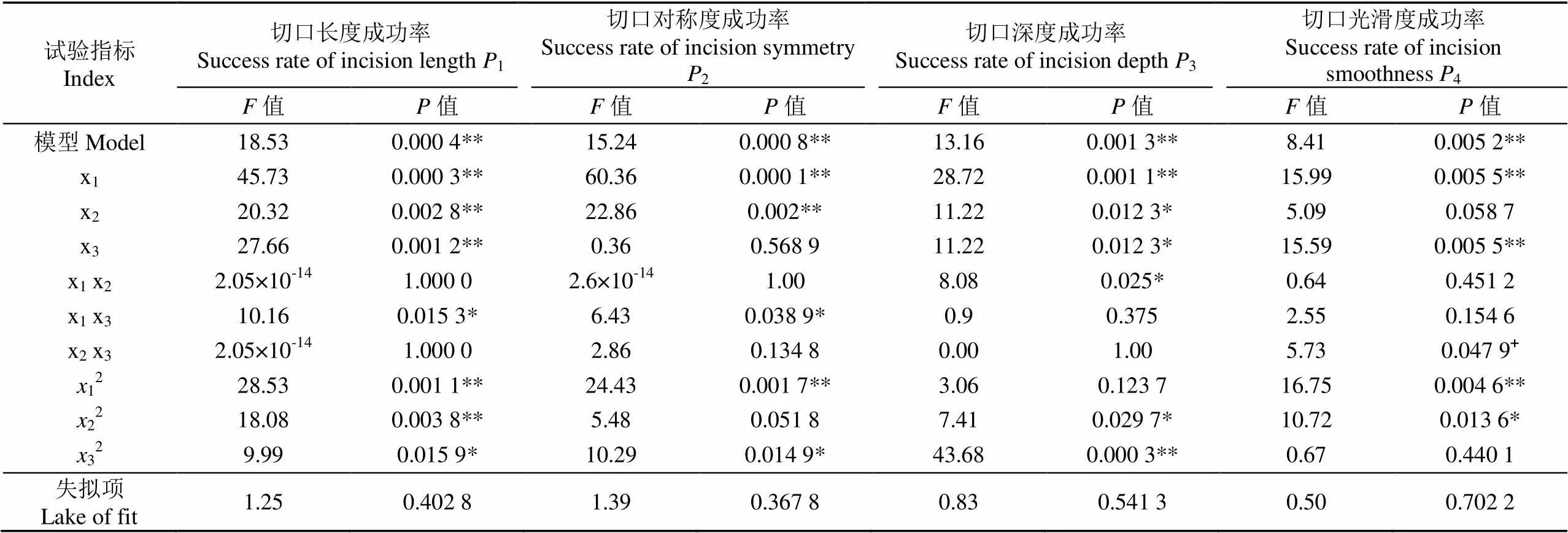
表5 回归模型的方差分析
注:*:<0.05为显著,**:<0.01为极显著。
Note:*: significant (<0.05). **: highly significant (<0.01).
3.4 响应面分析
如图5a所示,当输送速度保持259 mm/s不变时,夹持V角与切割转速3的交互作用对切口长度成功率1的影响规律:切口长度成功率1随夹持V角1的减小而增大;随着切割转速的提高,切口长度成功率1逐渐提高。响应面沿1方向变化速率与沿3方向的变化速率几乎相同,说明夹持V角1与切割转速3对切口长度成功率1的影响相同。夹持V角的大小决定输送过程中夹持的稳定性和切割过程中定位的准确性,当夹持V角小于最后一节虾体楔角时,宽度和高度较大的前几节虾体与宽度和高度较小的后几节虾体均能被夹持空间稳定的夹持,圆盘刀可顺利的把虾体后几节切开,此时切口长度成功率1最大。随切割转速3增大,圆盘刀接触到虾体即可在虾体上划出切口,所以切口长度成功率1随切割转速3的增大而提高。
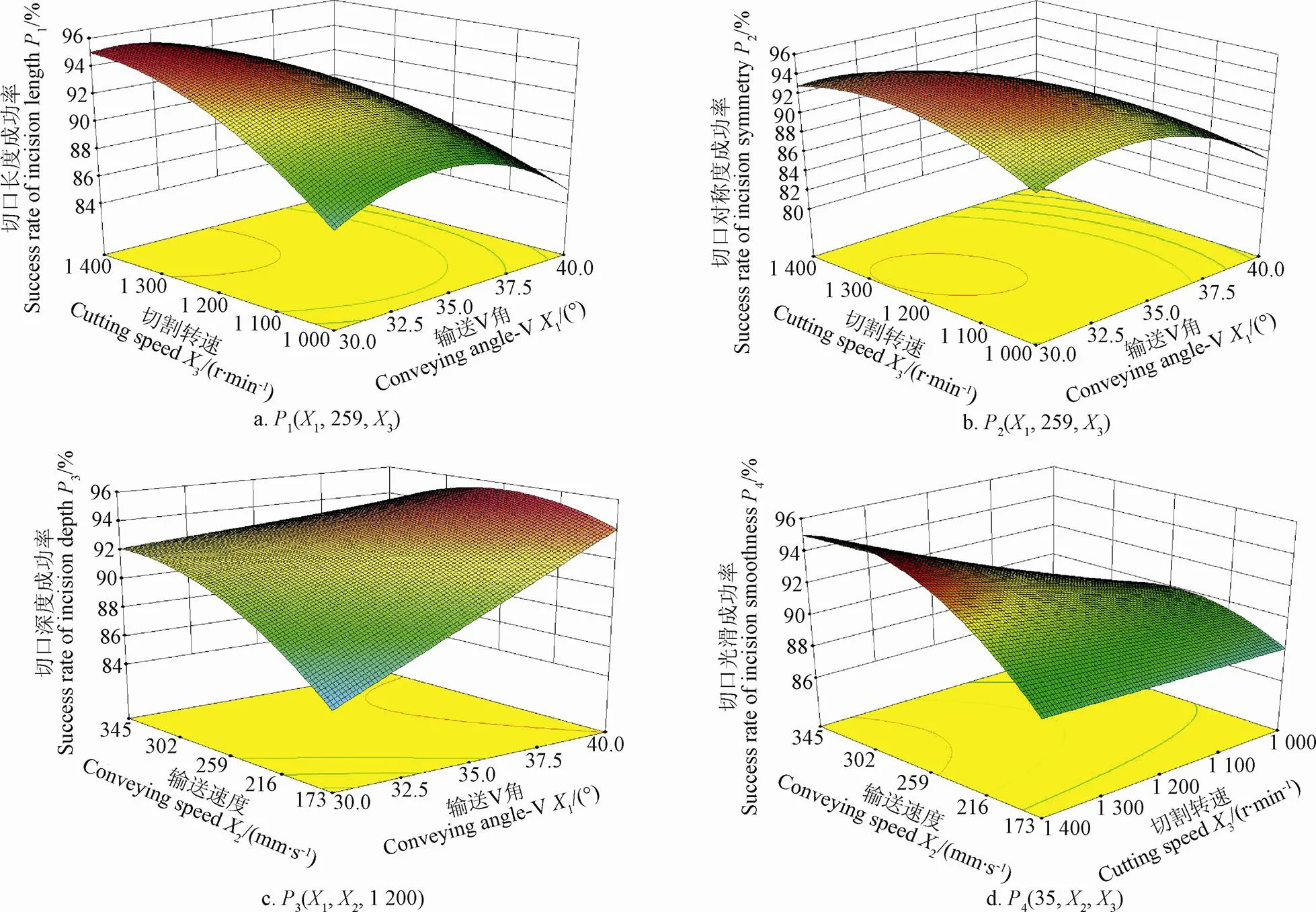
注:响应面试验因素和水平表见表3,响应值见表4,下同。
如图5b所示,当输送速度保持259 mm/s不变时,夹持V角1与切割转速3对切口对称度成功率2的影响规律:随夹持V角1的减小切口对称度成功率2逐渐升高,随切割转速3的增大切口对称度成功率2先升高后降低。响应面沿1方向的变化速率快,沿3方向的变化速率慢,说明在试验水平下,夹持V角1对切口对称度成功率2的影响比切割转速3的影响显著。随夹持V角1的减小切口对称度成功率2逐渐增大,当夹持V角小于最后一节虾体楔角时,虾体的后两节已被稳定的夹持,切口对称度成功率2达到最大,切口对称度成功率2不再随夹持V角减小而增大;随着切割转速3的增大对称度成功率2先升高,当切割转速3大于一定值时,虾体被切割的次数增加,对称度成功率2不再升高,甚至降低。
如图5c所示,当切割转速保持1 200 r/min不变时,夹持V角1与输送速度2的交互作用对切口深度成功率3的影响规律:深度成功率3随夹持V角1的增大而增大;随输送速度2的增加,深度成功率3逐渐增大;响应面沿1方向变化速率快沿2方向的变化速率慢,说明在试验水平下夹持V角比输送速度对深度成功率3的影响显著。当夹持V角1增大以后,后几节虾体的夹持稳定性降低,在圆盘刀向下的切割分力作用下,弹性海绵发生较大的变形,虾体的位置下移,开背刀的高度不变,所以切口的深度成功率3有所提高;随着输送速度2的增加,输送的平稳性降低,向下的切割分力容易使虾体在V型夹持空间的位置下移,因而切口的深度成功率3有所提高,但提高的幅度较小。
如图5d所示,当夹持V角35°保持不变时,输送速度2和切割转速3的交互作用对切口光滑度成功率4的影响规律:光滑度成功率4随着输送速度2的增大而增大;随着切割转速3的增加,切口光滑度成功率4也逐渐增加;响应面沿着3方向的变化速率比沿着2的方向变化速率快,说明在该试验水平下切割转速3对切口光滑成功率的影响比输送速度2的影响显著。随着圆盘刀切割转速3的增加,切口光滑度成功率4提高,当切割转速3大于一定值以后,刀片的振动稳定性受到影响,切口光滑度成功率4不再提高;随着输送速度2的增加,虾体经过切割工位的时间缩短,虾体被切割的次数减少,切口的光滑度成功率4提高,当输送速度大于一定值以后输送稳定性受到影响,切割过程不平稳,切口的光滑度成功率4也不再升高。
3.5 参数优化
为了获得带式对虾开背机的最佳工艺参数组合,本文以评价开背效果的4个指标:1、2、3、4为目标函数,对开背机的工作参数进行优化。运用Design-Expert 8.0.6软件的优化分析功能对4个指标的回归数学模型进行优化分析,目标函数为:1[max];2[max];3[max];4[max];约束条件为:1∈[−1,1];2∈[−1,1];3∈[−1,1];通过软件选出满意度最高的编码值组合:1=−0.37,2=0.31,3=0.28,换算为对应的实际值夹持V角为33°,输送速度为285 mm/s,切割转速为1 250 r/min,最佳参数组合下4个评价指标的预测值分别为:1=92.46%,2=95%,3=91.83%,4=93.54%。
为了验证参数匹配的可行性,以优选出的最佳工艺参数组合,取3组、40只/组对虾在带式对虾开背机上进行验证试验,对试验结果取均值可得1=92.5%,2=90.83%,3=90.0%,4=93.33%,与预测值误差绝对值均小于5%,说明上述预测模型是可靠的,得到的最佳工艺参数组合也符合开背机的要求。带式对虾开背机试验如图6所示。
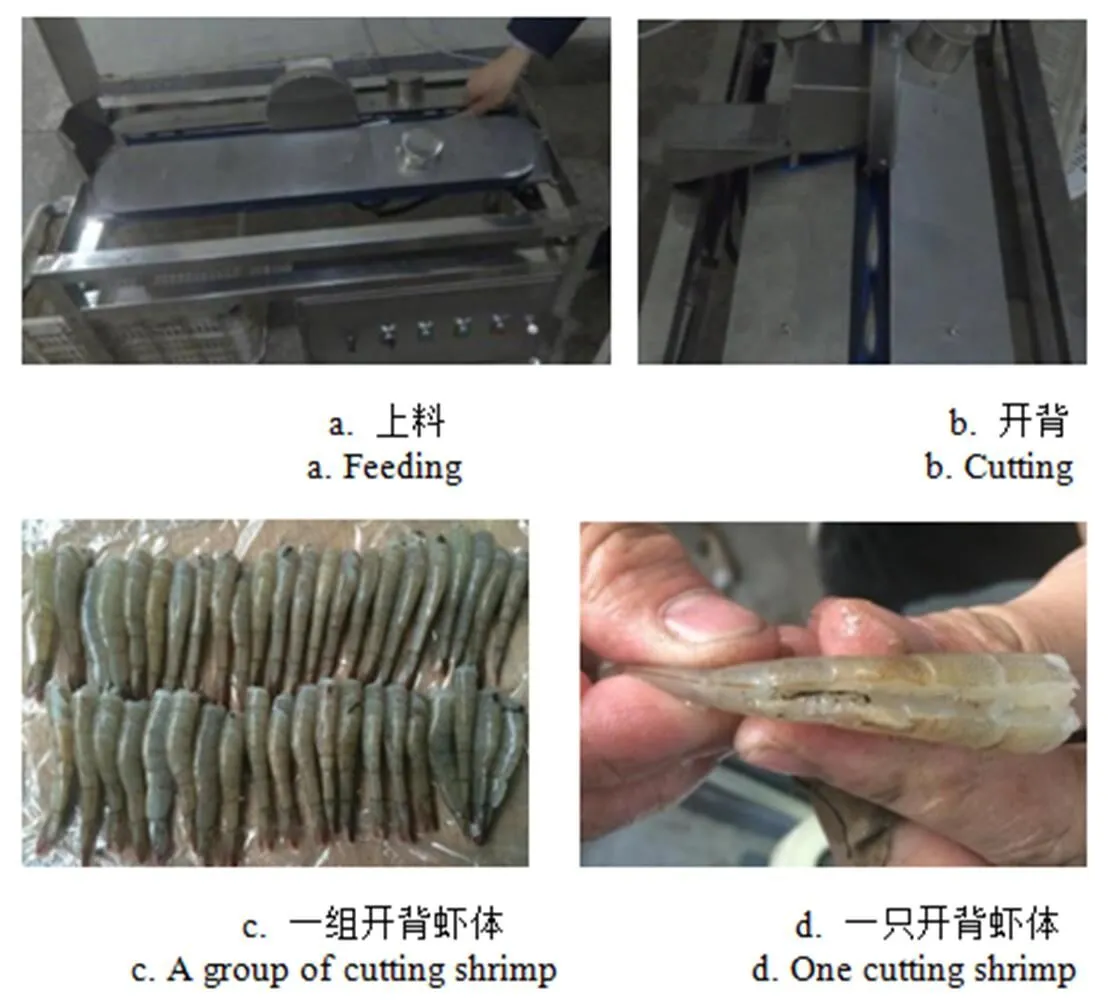
图6 对虾开背试验
4 结 论
1)根据虾体楔角特征,确定了带式输送夹持对虾开背机的方案,实现了虾体的稳定夹持与平稳输送,对该方案的夹持与输送机构、夹持V角调节机构、限深与导正部分进行了详细设计。限深与导正机构配合柔性带式V角夹持输送,共同实现切割深度的保证。
2)通过Design-Expert 8.0.6b软件对试验结果进行了优化,确定了开背机的最佳工艺参数组合:夹持V角为33°,输送速度为285 mm/s,切割转速为1 250 r/min,评价指标的预测值分别为:切口长度成功率为92.46%,切口对称度成功率为95%,切口深度成功率为91.83%,切口光滑度成功率为93.54%;对优选出的参数组合进行了试验验证,结果表明带式对虾开背机性能可靠稳定,各项指标均满足要求,与预测值误差绝对值均小于5%。
试验表明带式输送夹持对虾开背机满足对虾开背的技术要求,调节方便可靠,可为智能化对虾开背机的设计提供参考。
[1] 赵玉达,张秀花,王泽河,等. 对虾机械式剥壳技术的探讨与研究[J]. 农机化研究,2014,36(7):42-45.
Zhao Yuda, Zhang Xiuhua, Wang Zehe, et al. Discuss and research on shrimp mechanical shelling technology[J]. Journal of Agricultural Mechanization Research, 2014,36(7): 42-45. (in Chinese with English abstract)
[2] 李影欣,崔保健,弋景刚,等. 双辊式对虾分级设备的试验与研究[J]. 食品与机械,2014(3):94-97.
Li Yingxin, Cui Baojian, Yi Jinggang, et al. Test and research on double roller shrimp grading device[J]. Food and Machinery, 2014(3): 94-97. (in Chinese with English abstract)
[3] 赵庆龙,张秀花,王泽河,等. 基于对虾体型特征的定向排序装置的设计[J]. 江苏农业科学,2015,43(8):394-396.
[4] 赵庆龙,张秀花,李铎,等. 对辊式对虾定向机的设计[J]. 江苏农业科学,2016,44(7):410-412.
[5] 韩翠,张秀花,李娜,等. 对虾去头柔顺机械手的设计与研究[J]. 食品与机械,2015(5):132-135.
Han Cui, Zhang Xiuhua, Li Na, et al. Design and research on compliant for shrimps head cutting[J]. Food and Machinery, 2015(5): 132-135. (in Chinese with English abstract)
[6] 李铎,张秀花,王伟,等. 对辊挤压式对虾去头装置研究[J]. 河北农业大学学报,2017,40(1):97-101.
Li Duo, Zhang Xiuhua, Wang Wei, et al. Experimental study on the dual-roller squeeze device for shrimp head cutting[J]. Journal of Agricultural University of Hebei, 2017, 40(1): 97-101. (in Chinese with English abstract)
[7] 张泽明,王泽河,张秀花,等. 一种连续式对虾剥壳装置的设计与试验研究[J]. 食品与机械,2015,31(3):115-118.
Zhang Zeming, Wang Zehe, Zhang Xiuhua, et al. Design and test on continuous peeling device for shrimp[J]. Food and Machinery, 2015, 31(3): 115-118. (in Chinese with English abstract)
[8] 易俊洁,丁国微,胡小松,等. 南美白对虾剥壳工艺比较及其对虾仁品质的影响[J]. 农业工程学报,2012,28(17):287-292.
Yi Junjie, Ding Guohui, Hu Xiaoson, et al. Comparison of shucking techniques for white shrimp and its effect on quality of peeled shrimp[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(17): 287-292. (in Chinese with English abstract)
[9] 张进疆,张林泉. 广东省虾加工装备技术发展重点研究[J]. 现代农业装备,2011(3):44-46.
Zhang Jinjiang, Zhang Linquan. The Study on the development of shrimp processing equipments in Guangdong[J]. Modern Agricultural Equipments, 2011(3): 44-46. (in Chinese with English abstract)
[10] 张丽丽,王泽河,张秀花,等. 对虾开背工艺方案的设计与研究[J]. 食品与机械,2013(5):138-140.
Zhang Lili, Wang Zehe, Zhang Xiuhua, et al. Research and design on process of back opening of shrimp[J]. Food and Machinery, 2013(5): 138-140. (in Chinese with English abstract)
[11] 王利光,张秀花,李纪刚,等. 链板式对虾开背装置的试验研究[J]. 河北农业大学学报,2017,40(2):93-96. Wang Liguang, Zhang Xiuhua, Li Jigang, et al. Expeimental study on the shrimp-cutting device formed by chain plate[J]. Journal of Agricultural University of Hebei, 2017, 40(2): 93-96. (in Chinese with English abstract)
[12] 张秀花,王泽河,张丽丽,等. 基于摩擦特性的轮式对虾背腹定向装置[J]. 河北农业大学学报,2015,38(1):122-127.
Zhang Xiuhua, Wang Zehe, Zhang Lili, et al. Wheel directional device for shrimp based on the friction characteristics of it’s back and abdomen[J]. Journal of Agricultural University of Hebei, 2015, 38(1): 122-127. (in Chinese with English abstract)
[13] Douglas R. Shrimp deveining apparatus and method: US6273807B1 [P]. 2001-08-14.
[14] Derrel Sawyer, Caddo Mill. Shrimp-cutting machine for cutting intermediate joints:US8079896B1[P]. 2011-12-20.
[15] Wallace N. Shrimp sorting, deveining and peeling machine: US2960719[P].1960-11-20
[16] Douglas R. Shrimp processing apparatus and method: US6488576B1[P].2002-12-03.
[17] Arthur Grammer, Deerfield Beach. Shrimp peeling machine: US4843683[P].1989-07-04.
[18] Betts E D, Keith J T, Pershinske J E. Universal shrimp peeling machine: US4745660[P].1988-05-24.
[19] 彭德权. 虾开肚机: ZL200420102337.5[P]. 2006-06-28.
[20] 彭德权. 虾开背除肠剥壳机: ZL201120019947.9[P]. 2011-09-07.
[21] 彭德权. 虾开背除肠剥壳机中的轮式循环装置: ZL201120019853.1[P]. 2011-01-21.
[22] 赵庆龙,张秀花,王家忠,等. 一种对虾开背去头装置: ZL201310613088.X[P].2016-09-14.
[23] 张丽丽,王泽河,张秀花,等. 一种批量对虾开背机: ZL201320240709.X[P].2013-10-30.
[24] 张秀花,王利光,王泽河,等. 一种皮带式对虾开背装置: ZL201620314583.X[P].2016-08-31.
[25] 戴志远,杨莹,王宏海,等. 响应面法优化新型鱿鱼肉肠的加工工艺[J]. 中国食品学报,2011,11(3):110-117.
Dai Zhiyuan, Yang Ying, Wang Honghai, et al. Optimization of processing technolgy for recombined product from fish flesh and squid by response surface method[J]. Journal of Chinese Institute of Food Science and Technology, 2011, 11(3): 110-117. (in Chinese with English abstract)
[26] 陈庆余,沈健,欧阳杰,等. 典型海产小杂鱼机械去脏试验[J]. 农业工程学报,2013,29(20):278-285.
Chen Qingyu, Shen Jian, Ouyang Jie, et al. Experiment of mechanized gutting for typical small marine fish[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(20): 278-285. (in Chinese with English abstract)
[27] 赵庆龙. 可调辊组式对虾剥壳机的设计与试验研究[D]. 保定:河北农业大学,2016.
Zhao Qinglong. Design and Experimental Research on Adjustable Rollers Shrimp Peeling Machine[D]. Baoding: Agricultural University of Hebei, 2016. (in Chinese with English abstract)
[28] 葛宜元. 试验设计方法与Design-Expert软件应用[M]. 哈尔滨:哈尔滨工业大学出版社,2015.
[29] 张秀花,赵庆龙,王泽河,等. 可调五辊式对虾剥壳机剥壳参数优化试验[J]. 农业工程学报,2016,32(15):247-254.
Zhang Xiuhua, Zhao Qinglong, Wang Zehe, et al. Parameter optimization experiment of adjustable five rollers shrimp peeling machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(15): 247-254. (in Chinese with English abstract)
[30] 刘文卿. 实验设计[M]. 北京:清华大学出版社,2007:64-100.
Design and experiment of shrimp backside cutting machine formed by belt clamping and conveying
Zhang Xiuhua1, Wang Liguang1, Yi Jinggang1, Wang Zehe1, Wang Jie2
(1. College of Mechanical and Electrical Engineering, Agricultural University of Hebei, Baoding 071001, China;2. College of Food Science and Technology, Agricultural University of Hebei, Baoding 071001, China)
Shrimp backside cutting is an important pretreatment process of shrimp’s mechanized peeling, which directly affects the realization of mechanical shelling. Aiming at the current situation of immature development of shrimp cutting and the shortage of backside cutting device in China,it is urgent to develop the shrimp cutting machine which is suitable forand adapted to each level shrimp with different shape parameters. Furthermore, to develop a practical and reliable shrimp cutting equipment is of great significance to promote shrimp’s mechanized processing. In this paper, a shrimp backside cutting machine formed by belt clamping and conveying has been designed and manufactured. This machine consisted of four main sections: the clamping and conveying mechanism, the adjusting mechanism of clamping angle-V, the fine-tuning mechanism of blade height, and the depth limiting and guiding parts. The basic requirement for clamping and conveying mechanism was to achieve continuous and stable gripping of the shrimp and to ensure the correct posture when getting on the shrimp’s backside cutting and reduce the clamped body damage of shrimp. The clamping and conveying mechanism consisted of two sets of independent belt conveyor mechanism. The inner side of the belt was arranged in rows of tensioning wheels which led the conveyor belt, and the entire conveyor belt was driven by a stepper motor with a timing pulley with transmission ratio. The clamping angle V adjustment motion was accomplished by the angle adjustment and the gap compensation. The angle adjustment electric push rod drives the slider to slide up and down soon afterwards the bending rocker arm begins rotating, and the action produced torque to drive the belt base turn a certain angle, and then to achieve the adjustment action of the clamping V angle which formed by the two symmetrical belt. The gap compensation electric push rod drove the base pin to move left and right and then adjust the gap between the two symmetrical belts drive mechanism, and these actions ensured the space in the bottom of the V-shaped clamping unchanged ultimately. The depth limiting plate and the inverted U-shaped plate were mounted on the motor shield. The disc knife passed through the slot of the depth limiting plate to control the depth of the incision by adjusting the height of the blade leaking. Inverted U-shaped plate with different closed mouth on the two sides which was arranged at a certain angle on the above of the V-shaped clamping space, and the plate forms an inverted U-shaped and wedge-shaped space that converged along the movement of the shrimp. The depth limiting and guiding parts can straighten and guide the shrimp body and effectively ensure the depth and incision symmetry. Through the single factor test, it was illustrated that how the three key parameters that the clamping V Angle, conveying speed and cutting speed, to influence four evaluation indicators which were incision length, incision symmetry, incision depth and incision smoothing on the shrimp backside cutting machine. Furthermore the three key parameters have been optimized. An orthogonal test of three factors and three levels which had been arranged by Box-Behnken Design, the regression mathematical models of four evaluation indicators with three key parameters had been found. The variance analysis of the test results was carried out by using Design-Expert8.06 software. The satisfactory process parameters of the shrimp backside cutting machine had been obtained through the optimization analysis. The optimal combination of the process parameters were as follows: conveying angel of 33°, conveying speed of 285 mm/s, cutting speed of 1 250 r/min. From the results of predicting model, success rate of incision length was 92.46%, success rate of incision symmetry was 95%, success rate of incision depth was 91.83%, success rate of incision smoothing was 93.54%; The related verification experiment under the best combination of the process parameters was carried out, and the experimental results showed that the success rate of incision length was 92.5%, success rate of incision symmetry was 90.83%, success rate of incision depth was 90.0%, success rate of incision smoothing was 93.33%. By comparing the predicted results with experimental results, we concluded that the shrimp backside cutting machine can work reliably and stably under condition of the best parameter combination, and moreover all indicators can meet the requirements.
mechanization; design; optimization; shrimp; shrimp backside cutting machine; belt clamping and conveying
10.11975/j.issn.1002-6819.2017.20.035
S985.2+1; TS254.3
A
1002-6819(2017)-20-0284-08
2017-05-19
2017-08-27
海洋公益性行业科研专项(201205031);河北省高等学校科学技术研究项目(ZD2016111);河北农业大学理工基金(LG201501)
张秀花,博士,副教授,主要从事机械设计与理论、农业机械技术装备的研究。Email:zhang72xh@163.com
张秀花,王利光,弋景刚,王泽河,王 颉. 带式夹持输送对虾开背机的设计与试验[J]. 农业工程学报,2017,33(20):284-291. doi:10.11975/j.issn.1002-6819.2017.20.035 http://www.tcsae.org
Zhang Xiuhua, Wang Liguang, Yi Jinggang, Wang Zehe, Wang Jie. Design and experiment of shrimp backside cutting machine formed by belt clamping and conveying[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(20): 284-291. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.20.035 http://www.tcsae.org
猜你喜欢
当代水产(2022年8期)2022-09-20
当代水产(2022年5期)2022-06-05
当代水产(2021年8期)2021-11-04
当代水产(2021年4期)2021-07-20
理论与创新(2021年3期)2021-06-24
制造技术与机床(2019年11期)2019-12-04
建材发展导向(2019年11期)2019-08-24
中国设备工程(2017年11期)2017-06-29
山东工业技术(2016年15期)2016-12-01
小猕猴学习画刊(2015年7期)2015-08-07
