
断路器弹簧操动机构参数化建模与优化
2018-03-05 12:32任效龙高宏力田怀文
机械设计与制造 2018年2期
任效龙,高宏力,田怀文,何 翔
(西南交通大学 机械工程学院,四川 成都 610031)
1 引言
断路器操动机构的性能对断路器的性能有着重要影响,因此,操动机构的设计是断路器设计的基础和核心之一。弹簧操动机构结构比较简单,并且是安全可靠的,所以大部分断路器均采用这种结构,因此对其进行结构优化具有重要的现实意义。对于弹簧操动机构,拐臂、绝缘拉杆和分闸弹簧的参数对断路器的分闸特性具有决定性影响。所以,如何确定操动机构的结构参数以满足动触头的动力学特性将是增强分闸特性的关键[1]。
文献[1-2]分别用能量法及其改进算法对分闸运动进行了分析,但方法难度较大;文献[3]通过建立操动机构额Pro/E及ADAMS仿真模型对其动力学问题进行分析;文献[6]只对分闸弹簧进行了多目标优化,具有一定的局限性。某公司在断路器设计时采用传统方式,即在方案确定以后,需要制造实际设备进行试验验证,当分闸性能不满足要求时需要重新修改设计和并再次建造样机试验,这就使得设计过程冗长,并且浪费人力与物力。
因此,本课题采用虚拟样机技术对未满足给定要求的断路器操动机构进行仿真及优化,并对优化后的结果进行试验验证,为断路器操动机构的设计提供参考,因此克服了传统方式的诸多不足。
2 机构运动原理及主要技术参数

图1 操动机构结构示意图Fig.1 Configuration of Sketch of Spring Actuator
操动机构处于合闸状态时,如图1所示。
此时的永磁机构通电,主轴被锁定。此时,绝缘拉杆超行程8mm,使得触头弹簧被压缩并蓄能,为动触头提供了闭合所需的额定触头压力。当发出分闸命令后,永磁机构断电,主轴约束解除,并在分闸弹簧的推动下开始顺时针转动,拐臂1又带动绝缘拉杆运动,触头弹簧伸长完成8mm超行程的回复,合闸时储存的能量释放出来,这部分能量使得主轴的运动速度得到很大提升,拐臂2带动动触头向下运动,从而完成分闸运动。
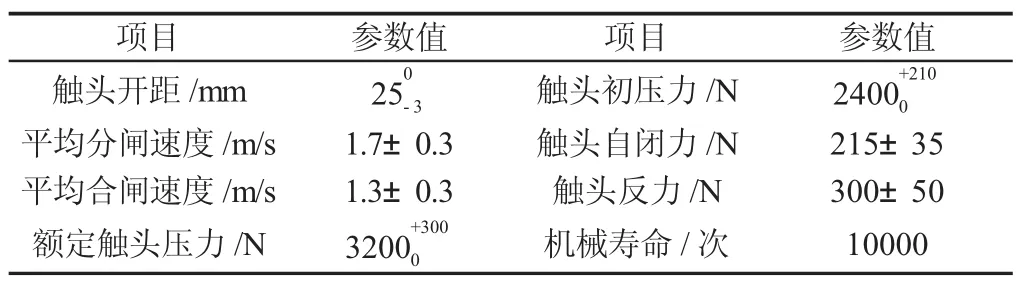
表1 断路器主要技术参数Tab.1 Main Technical Data
3 虚拟样机模型及优化前仿真
3.1 模型的导入与简化
利用三维软件SolidWorks强大的建模能力,建立操动机构的三维模型。并将SolidWorks建立的模型转换为Parasolid文件格式,导入ADAMS中,采用Boolean运算合并部件,从而精简操动机构的运动构件,并对合并后的part重新命名。在ADAMS中简化模型后,设置初始条件。设置重力沿-Y方向为-9806.65kg·mm/s2,根据实际样机设置各零件的材料,其中永磁体铁芯、绝缘拉杆和动触头采用“User Input”选项,直接赋予其重量,重量分别为3.7kg、2.5kg和3.5kg,其余元件材料均设置为普通碳钢,对操动机构的支撑及静触头等进行锁定,并根据机构的实际运动对模型添加移动副和转动副,在永磁体与伸出杆之间、拐臂1与绝缘拉杆的连接处和动触头与静触头接触处添加接触类型为固体-固体的接触,从而完成操动机构的虚拟样机模型的建立与简化。操动机构的虚拟样机模型,如图2所示。

图2 操动机构的虚拟样机模型Fig.2 The Virtual Prototype Model of Spring Actuator
3.2 优化前初始参数的仿真
为验证虚拟样机模型的准确性,同时也为参数化模型寻找适合的环境参数,对初始参数下的模型进行仿真,然后与实验数据进行对比,从而找出最合适的环境参数。
机构运动副连接处的材料均为碳钢,为提高模型合理性,为各个运动副添加摩擦系数为0.15的摩擦力,并且将弹簧阻尼设置为0.1,从而完成初始环境参数的设置。
在分闸过程中,机构运动的能量主要来自分闸弹簧和触头弹簧的弹性势能。触头弹簧的弹性势能对提高动触头的刚分速度具有很大作用。在分闸运动后期,由于冲击作用致使触头行程有一定的反弹。分闸过程中,动触头位移与时间之间的关系,如图3所示。仿真模型的输出曲线与实际样机的输出曲线总体趋势一样,验证了虚拟样机模型的正确性。由仿真结果可以求出前12mm分闸行程的平均速度为1.38m/s,而实验所得到的结果为1.35m/s,由此可见,运动副的摩擦系数和弹簧阻尼的设置较合理,可以直接运用到参数化模型中。

图3 分闸行程与时间的关系曲线Fig.3 The Curve of Opening Stroke Versus Time
4 操动机构参数化建模及优化
4.1 参数化建模
参数化设计是将模型中关键的固定值用变量代替,这样可以通过修改变量,实现修改模型。从而实现快速修改模型,同时,只有在参数化的基础上,才能通过设计研究、试验设计和优化计算,分析设计变量对样机性能指标的影响程度,并且找到设计变量的最优值。由于断路器操动机构的结构过于复杂,故在参数化建模时采用SolidWorks与ADAMS相结合的方式,即对分闸速度影响不大、不需要进行优化的部件由SolidWorks直接导入ADAMS中,而对分闸速度影响显著且会影响动触头行程的部件如拐臂、绝缘拉杆等在ADAMS中进行参数化建模。在建模的过程中,通过建立设计点形成对各个杆长的尺寸参数化,实现通过改变点的位置来调整模型尺寸。

图4 弹簧操动机构的机构运动简图Fig.4 Kinematic Diagram of Spring Actuator
拐臂1和拐臂2的臂长和角度以及分闸弹簧与触头弹簧的弹性系数、预压缩力对动触头的分闸速度有明显影响,为主要优化对象。因此,在参数化建模时需建立相应的设计变量对其进行表征。设计变量及设计点坐标,如表3、表4所示。

表3 参数化模型的设计变量Tab.3 Design Variables of the Parameterized Model
在参数化建模时,将拐臂和绝缘拉杆均简化为连杆,并将连杆的marker与所建设计点进行相关联,实现通过改变设计点坐标来改变拐臂等的尺寸参数。

表4 设计点的坐标值Tab.4 The Coordinates of Design Points
根据上述确定的设计变量和设计点在ADAMS中建立操动机构的参数化模型,并根据初始参数时仿真所得到的设置条件对参数化模型进行设置,建立的参数化模型,如图5所示。
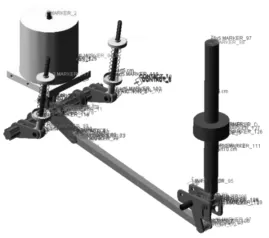
图5 操动机构的参数化模型Fig.5 Parametric Model of Spring Actuator
4.2 拐臂2等参数的确定
由于操动机构的约束过于复杂、优化的目标函数不方便提取,并且分闸运动的尺寸优化会对合闸运动产生影响,故而不适合采用ADAMS自动优化的方式。并且用户提出采用手动修改拐臂1的长度L1和角度θ1来对操动机构进行优化的方案,为满足操动机构对位移和力的要求,需要根据用户提供的L1和θ1的数据确定拐臂2等的参数。
为方便计算,做以下设定:点A的坐标为(xa,ya),点B的坐标为(xb,yb),合闸位置时,点C的坐标为(xc,yc),点 D 的坐标为(xd,yd);分闸位置时,点 C′的坐标为(x′c,y′c),点 D′的坐标为(x′d,y′d)。
根据用户输入的L1和θ1,则可直接计算出点C和点D的坐

由于在参数化模型中改变L1和θ1的值,拐臂1转动的角度不变,则可以据此求出分闸位置点C′的坐标:

根据拐臂2的长度和点C与点D在绝缘拉杆上的相对位置,可得以下方程:

由此可求出点 D′的坐标为(x′d,y′d)。
首先,考虑动触头的位移约束,即要求在永磁体铁芯运动22mm时,动触头的行程为(22~25)mm。现将动触头行程转换为拐臂2转动的角度,由操动机构的三维模型中测量可知,拐臂2的转动角度β的范围为24.79°≤β≤27.93°,由此得不等式组:

由上述解不等式组即可选取圆整的L2和θ2的值。
然后,考虑额定触头压力和触头初压力。设触头弹簧力对点B的力臂为h,则:

对B点处的力矩情况进行分析,可得以下不等式组:

其中,触头弹簧预压缩力P1可由以下公式计算:

由此可确定触头弹簧的相关参数。
最后,考虑永磁体保持力的约束。机构在合闸时,主动力提供的最大保持力为7800N。对点A处的力矩情况进行分析可得:

至此,在满足操动机构各项约束条件下的设计变量的数值均可选出。
4.3 优化结果
经过上节的计算可知,在进行参数选择时,分闸弹簧的参数可在一定范围内变化,经过仿真发现分闸弹簧对分闸速度有较大影响。故首先在弹簧参数不变的基础上优化拐臂的参数以提升动触头的分闸速度,然后在满足分闸速度和操动机构各项约束的前提下尽量减小分闸弹簧的预压力,以减少其对合闸速度的不利影响。在得到优化数据后,建立实物样机进行实验验证。实物样机,如图6所示。

图6 实物样机图Fig.6 Physical Prototype Map
优化后的动触头位移与时间之间的关系,如图7所示。操动机构参数化模型仿真的结果与实验测量的结果的总体趋势一致。经过计算知,虚拟样机优化后的仿真速度为1.78m/s,实测分闸速度为1.72m/s,满足了断路器分闸的操作要求。

图7 优化后分闸行程与时间的关系曲线Fig.7 The Curve of Opening Stroke Versus Time After Optimization
5 结论
从断路器弹簧操动机构作业原理出发,从运动学和动力学角度对机构进行分析。(1)建立了断路器操动机构的虚拟样机模型,通过多体动力学仿真分析与试验结果对比,验证了模型的正确性。同时,得到了摩擦系数等重要环境参数,为操动机构的参数化模型相关参数的正确设置打下了基础。(2)在操动机构SolidWorks三维模型的基础上对关键零件进行了参数化建模,并优化得到了合适的尺寸参数,实现动触头分闸速度由1.35m/s提高了1.72m/s,达到断路器分闸的操作要求,大大提高了企业对操动机构的优化效率。
[1]张应中,徐可新,阎崇毅.高压断路器弹簧操动机构的优化与仿真[J].高压电器,2014,50(4):66-71.(Zhang Ying-zhong,Xu Ke-xin,Yan Chong-yi.Optimization and simulation of the spring actuator for circuit breakers[J].High Voltage Apparatus,2014,50(4):66-71.)
[2]JEONG K Y,AHN G Y.Optimization of the spring design parameters of a circuit breaker to satisfy the specified dynamic characteristics[J].International Journal of Precision Engineering and Manufacturing,2004,5(4):43-49.
[3]崔彦斌,高志,曹云鹏.基于ADAMS的高压断路器操动机构动力学仿真研究[J].机械设计与制造,2006,26(4):66-67.(Cui Yan-bin,Gao Zhi,Cao Yun-peng.Dynamic simulation study on application ADAMS for the operating device for HV circuit[J].Machinery Design&Manufacture,2006,26(4):66-67.)
[4]麻芳兰,蔡力,郭衍超.小型甘蔗收割机剥叶断尾机构仿真试验研究[J].机械设计与制造,2015(12):105-107.(Ma Fang-lan,Cai Li,Guo Yan-chao,Xu Zhi-wei.Simulation research on cleaning leaves and breaking tails mechanism of small sugarcane harvester[J].Machinery Design&Manufacture,2015(12):105-107.)
[5]张豫南,张杰,黄涛.新型履带式移动平台的转向性能仿真分析[J].机械设计与制造,2015(11):223-226.(Zhang Yu-nan,Zhang Jie,Huang Tao.Steering performance simulation analysis of new tracked mobile platform[J].Machinery Design&Manufacture,2015(11):223-226.)
[6]陈刚,孙波,王尔智.真空断路器弹簧操动机构中分闸弹簧的多目标综合优化[J].高压电器,2007,43(6):448-450.(Chen Gang,Sun Bo,Wang Er-zhi.Multi-target optimization design for breaking spring of spring of spring actuator vacuum circuit breaker[J].High Voltage Apparatus,2007,43(6):448-450.)
[7]林莘,宋立峰,李永祥.真空断路器新型电机操动机构的多体动力学仿真[J].电网技术,2012,36(3):76-80.(Lin Xin,Song Li-feng,Li Yong-xiang.Multi-body dynamics simulation and analysis on novel motor-operating mechanism for vacuum circuit breakers[J].Power System Technology,2012,36(3):76-80.)
[8]Wen Hua-bin.Optimal design on spring of vacuums witch gear operating device by genetic algorithms[C].The Sixth World Congress on Intelligent Control and Automation.[S.l.]:IEEE,2006:7665-7669.
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
科技与创新(2022年11期)2022-06-14
电子制作(2021年4期)2021-06-16
设备管理与维修(2020年23期)2021-01-04
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
水电站机电技术(2019年1期)2019-01-22
电子制作(2018年14期)2018-08-21
电子制作(2018年10期)2018-08-04
中国棉花(2017年10期)2017-11-04
