直升机和无人机通信中继试飞技术研究
2018-03-26 02:17周慧楠汤恒仁
电光与控制 2018年3期
席 龙, 周慧楠, 汤恒仁, 李 靖
(中国飞行试验研究院航电所,西安 710089)
0 引言
无人机具有长航时、低成本等优势,直升机具有良好隐蔽能力和态势感知能力,二者混合编队可以大大提高作战能力,互为守望。目前,地面站对无人机的操控能力分为五级,直升机与无人机的协同等级也按照同样的标准划分:第Ⅰ级协同定义为接收和发送二次图像和数据;第Ⅱ级协同定义为直接接收无人机的图像或数据;第Ⅲ级协同定义为控制无人机的任务载荷;第Ⅳ级协同定义为控制无人机飞行;第Ⅴ级协同定义为控制无人机发射与回收[1]。美国陆军已经使用基奥瓦勇士直升机和阿帕奇直升机与多种无人机完成了Ⅳ级协同;美国海军也成立了直升机和无人机组成的混合飞行中队,提高作战效率,提升生存能力,增加纵深作战距离[2]。目前,我国直升机和无人机的研制能力和水平取得了很大提高,试验技术也在快速发展,但由于多方面原因,直升机和无人机协同作战还处于技术论证阶段,虽然在理论研究方面取得了较大突破,却未开展相关的飞行试验和作战演练,无法形成直升机和无人机协同作战体系。本文选择直升机和无人机中继通信作为典型任务开展相关技术研究和试飞演示验证,评估直升机直接接收无人机图像或数据的能力。
1 中继通信试飞剖面
武装直升机通常超低空飞行,利用地形隐蔽机动,发现目标后突然发起攻击,因此具有隐蔽性好、机动灵活、生存力强等特点。武装直升机作为一种超低空火力平台,往往由于地形遮挡等原因无法与地面指挥所建立联系,成为影响战斗力的一项重要因素。使用无人机和直升机编队作战可解决单兵种作战的局限性,无人机高空飞行,地面指挥所和直升机通过无人机进行信息交换。无人机作为空中基站既可解决直升机超低空飞行的通信问题,又具有成本和代价最小化的优点。图1为直升机和无人机中继通信试飞剖面,试验过程中,直升机和地面指挥所通过无人机进行超短波话音和数据通信,评估中继通信试飞能力,完成直升机与无人机第Ⅱ级协同能力演示验证。

图1 直升机和无人机中继通信试飞剖面Fig.1 Flight test profiles for helicopter and UAV relay communication
2 中继通信试飞关键问题分析
2.1 态势构建
中继无人机可以作为空中基站,其作战想定为:在整个中部区域内合理布置无人机,实现该作战区域通信的无缝覆盖。作战态势如图2所示,环境设置包括1架直升机、4架无人机、1个地面指挥所和1辆无人机指挥车[3]。具体占位如下:直升机飞行高度100 m,无人机指挥车和地面指挥中心布置在同一个区域,在地面指挥中心的正北、正南、正东和正西4个方位各发射1架无人机,以5 km的高度,1 km的半径盘旋,距离指挥中心200 km。
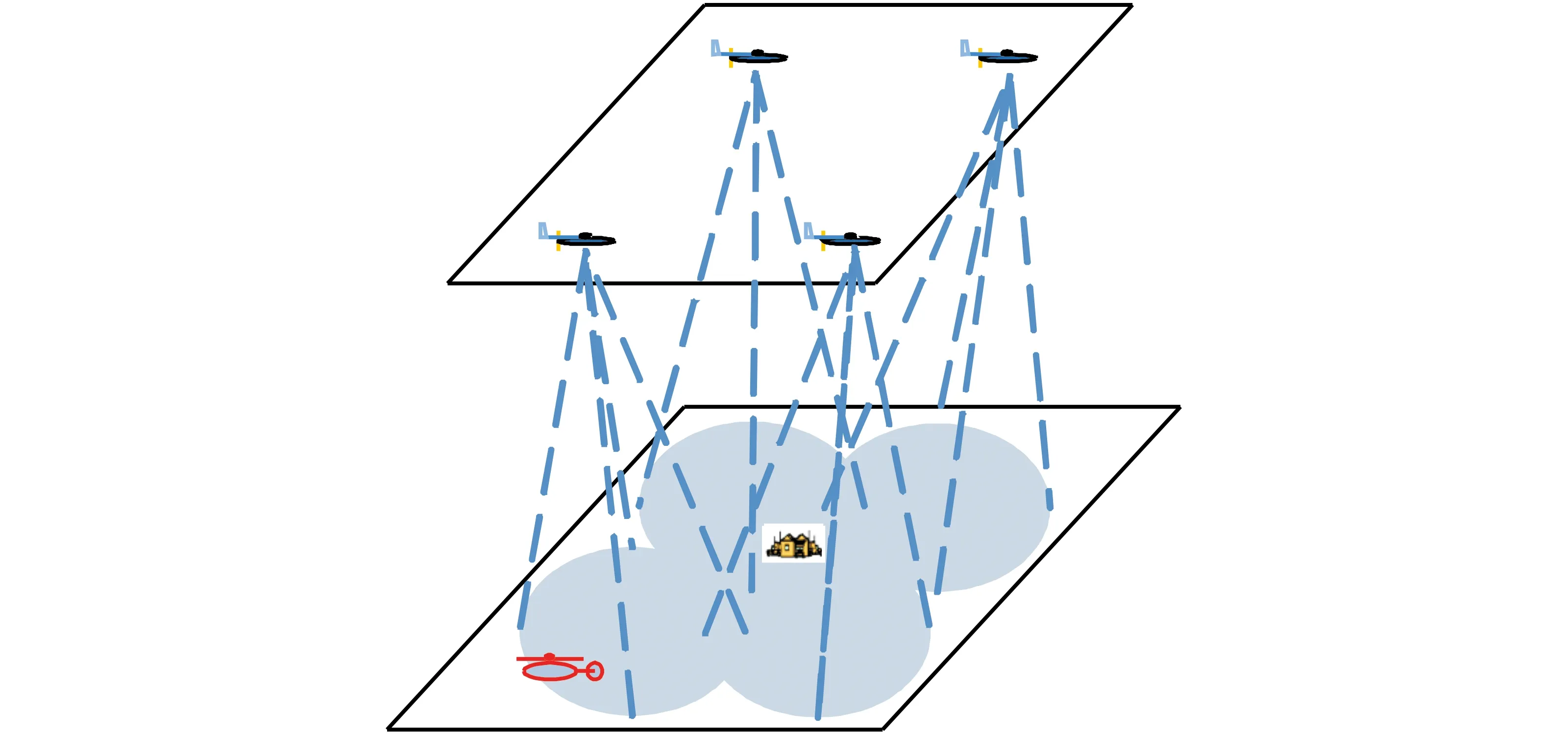
图2 无人机中继态势构建Fig.2 Situation construction of UAV relay communication
无人机飞行时中继通信覆盖区域几何简化模型如图3所示,无人机天线安装在机腹,并向下全向辐射,飞行高度为H,地球半径为R,中继通信距离为d,则通信覆盖区域DPE的面积可表示为
S=2πRh
(1)
式中:h为PF的长度,其算式为
h=(d2-H2)/(2H+2R) 。
(2)
天线辐射最小波束宽度可表示为
(3)
式中:

(4)
根据电磁波自由空间传播经验模型可知
(5)
式中:h1为无人机飞行高度;h2为直升机飞行高度。
根据式(1)、式(2)、式(5)可计算单架无人机的中继覆盖面积可达到345 000 km2,图2所示的阴影区域通信面积可达644 348 km2。作战态势投影剖面如图4所示,以O点为中心,1,2,3和4点布置无人机,则在ABCDEFGH围成的区域内,指挥中心都可以通过中继无人机对直升机进行指挥,从投影剖面图可以看出,通信距离覆盖了中部战区[4-8]。

图3 无人机中继几何关系Fig.3 Geometric relation in UAV relay communication
由于4架无人机对称占位,仅需对单架无人机和直升机的通信中继能力进行验证,如图4绿色区域所示,从而推断直升机和无人机态势想定的合理性和可行性。

图4 作战态势投影剖面图Fig.4 Projection profile of operational situation
2.2 试验安全分析
直升机和无人机在同一个试验场进行试飞演示验证,虽然不在同一个高度层上,但存在水平危险接近的情况。无人机在起飞、着陆及平飞过程中可能出现发动机空中停车,飞控系统、导航系统、通信链路失效等现象,存在坠落的可能性,对直升机造成安全威胁。图5为直升机与无人机通信中继试飞安全分析剖面图,其中,x轴表示东向距离,y轴表示北向距离,z轴表示飞行高度,包含了无人机所有可能出现的故障情况[9]。

图5 直升机与无人机飞行试验安全分析Fig.5 Safety analysis of helicopter and UAV flight test
假设无人机在待战区域内以O点为圆心,高度3 km,半径1 km盘旋飞行。黑色实线表示无人机规划的运动轨迹,红色区域为无人机盘旋水平位置±50 m的偏差。
若此时飞控系统、导航系统或舵机系统失效,无人机关闭发动机,应急开伞,无人机会降落在蓝色圆环内,该区域的内半径为1 km,外半径为1.2 km。
若无人机盘旋期间发动机空中停车,则进行下述操作。
1) 如果通信链路正常,可操控无人机滑翔轨迹,无人机的滑翔比为8~10,下降3 km时,水平滑翔距离可达24 km,无人机最远降落在灰色的区域内;
2) 若通信链路失效:
① 若此时飞机姿态过大,俯仰角大于50°,无人机会应急开伞,降落在蓝色区域;
② 若无人机姿态变化达不到开伞条件,会平稳向下滑翔,此时需要考虑2个极端情况:将无人机视为一个质点,它将会做平抛运动,根据运动学方程可计算出无人机会降落在紫色的区域,距离O点1.5 km;若无人机在理想情况下平稳滑翔,它将会降落在灰色区域。综上无人机将会降落在橘黄色区域内。
由图5可以看出,绿色区域为相对安全区,直升机可在该区域内与无人机进行近距通信中继试验。考虑风向时,无人机的盘旋选择修风模式,出现发动机空中停车,飞控系统、导航系统、通信链路故障后,无人机运动方式需要x和y方向上加入风力的分量,使蓝色、绿色、紫色、橘黄色和灰色区域同时移动,则直升机的飞行区域也需按照风向移动。
3 通信中继试验与评估
3.1 中继通信试验设计
直升机和无人机中继通信包括2个试验点,分别为话音中继通信和数据中继通信,需要在覆盖范围内验证直升机和无人机的中继通信能力。考虑无人机续航时间长、飞行成本低的特点,采用等效替换的原则,直升机单区域飞行,无人机由近及远拉距试飞,又由于地面山脉建筑等遮挡,影响空地通信距离,则采用双地面站进行指挥,中继通信试飞方案设计示意图如图6所示。

图6 中继通信试飞方案设计示意图Fig.6 Schematic diagram of flight test scheme for relay communication
无人机先起飞,起飞后飞向A点盘旋等待,直升机到达指定的试飞区域H后与地面S指挥所进行话音和数据通信。完成A点后,直升机盘旋等待,无人机飞向B点盘旋区,无人机到达试验区后,直升机和地面S指挥所继续通过无人机进行话音和数据通信。完成B点后,直升机原地等待,无人机飞向C点盘旋区,直升机和地面W指挥所进行话音和数据通信。完成C点后,直升机继续盘旋等待,无人机飞向最后试验点D,直升机和地面W指挥所进行话音和数据通信。完成D点后,直升机和无人机先后返回[10-11]。
3.2 中继通信试飞验证
无人机分别在试验点A,B,C,D占位时,地面指挥所通过话音指挥直升机完成相应的操作,并向直升机发送指令。话音中继通信演示验证结果如表1所示,试验结果表明,直升机能够接收到地面指挥所的指令并完成相应动作,常规和抗干扰模式功能正常,通话音量和音质较好,无失真现象发生,直升机和无人机话音中继通信功能性能满足使用要求;数传通信中继演示验证结果如表2所示,试验结果表明,直升机和地面指挥所能够接收到双方发送的数据指令,没有丢包和误码现象发生,直升机和无人机数据通信功能的性能满足使用要求,直升机与无人机具备Ⅱ级协同能力[12-13]。

表1 话音中继通信演示验证结果

表2 数传中继通信演示验证结果
3.3 中继通信试验评价
直升机和无人机Ⅱ级协同试验不只表现在提高通信能力,更多表现在对作战任务的启发和对后续协同路线图的影响,主要体现在以下几点:
1) 解决了直升机超低空飞行无法远距通信的问题,扩大了直升机的作战半径,增加纵深作战距离;
2) 通过分析海量试验数据,研究试验过程中通信时延、丢包率、误码率等关键技术问题,评估了有人无人协同通信链路的可靠性,为实现直升机控制无人机的任务载荷(第Ⅲ级)和控制无人机飞行(第Ⅳ级)奠定了坚实的基础;
3) 积累了宝贵的试验经验,构建了有人无人同场次、同空域试飞安全体系,并形成了有人无人协同试飞的路线图;
4) 衍生多种作战想定,通过搭配使用不同型号的直升机和无人机,可使作战剖面更加多元化,提高直升机和无人机混合编队作战的机动性和灵活性,提升了直升机的打击能力和生存能力。
4 结束语
本文根据直升机和无人机的作战特点,设计了直升机和无人机中继通信试飞剖面,开展了多机编队试验的关键技术研究,对双机Ⅱ级协同试验进行了试验点分解,完成了直升机和无人机中继通信试飞演示验证,具备Ⅱ级协同能力,对后续科研试飞具有指导和借鉴作用。
[1] 王子熙.美军有人直升机与无人机的协同作战[J].飞航导弹,2014(7):61-66.
[2] 王焱.有人/无人机协同作战[J].电讯技术,2013,53(9):1253-1258.
[3] 李妍文,霍帅珂,陈伟桢,等.基于Google Earth的无人机中继布局优化软件[J].现代电子技术,2014,37(4):60-63.
[4] 赵婷婷.无人机地面站与航迹规划的研究[D].天津:天津大学,2012.
[5] 杨波,陈金水,陈洋,等.无人机空中交通监视系统设计[J].科技创新与应用,2016(31):31-32.
[8] 卢艳军,刘季为,张晓东.无人机地面站发展的分析研究[J].沈阳航空航天大学学报,2014,31(3):60-64.
[7] 马璐.无人机地面遥控遥测系统研究[D].南昌:南昌大学,2013.
[8] 赵琳.无人机地面站监控软件的设计与实现[D].哈尔滨:哈尔滨工程大学,2015.
[9] 韩泉泉,席庆彪,刘慧霞,等.基于飞行安全的无人机控制技术发展趋势研究[J].现代电子技术,2014,37(13):22-26.
[10] 孙亮,林琳.俄军无人部队主力“奥尔兰-10”型无人机[J].轻兵器,2015(11):50-52.
[11] 黄建峰,姜云土,时满宏,等.全真可视化虚拟无人机巡线控制技术研究[J].空军预警学院学报,2016,30(1):49-52.
[12] 李源.基于短距离无线通信技术的无人机搜索系统研究[D].成都:成都理工大学,2013.
[13] 吴佰侠.基于短距离无线通信技术的无人机搜索系统设计[J].电子测试,2015(12):4-5.
猜你喜欢
小哥白尼(军事科学)(2021年5期)2021-08-30
环球时报(2019-01-10)2019-01-10
物联网技术(2018年6期)2018-06-29
电信科学(2017年6期)2017-07-01
红土地(2017年1期)2017-06-05
航天器工程(2015年3期)2015-10-28
电子设计工程(2015年16期)2015-02-27
无线电工程(2014年1期)2014-06-14
电信工程技术与标准化(2014年3期)2014-02-27
电子设计工程(2012年9期)2012-02-15