
基于三维激光扫描技术的西石门铁矿精矿盘库测量方法
2018-04-12 08:29石晓雨庞长保张文娟
现代矿业 2018年3期
石晓雨 崔 凯 庞长保 张文娟
(五矿邯邢矿业邯郸地质勘查有限公司)
三维激光扫描技术改变了以往数据采集方式,无需接触便可获得物体表面的形态特征,具有数据采集速度快、精度高、密度大、非接触和测量范围广等优点[1-2]。为提高精矿盘库测量精度,本研究以西石门铁矿为例,提出了一种基于三维激光扫描技术的精矿盘库测量方法。
1 三维激光扫描盘库测量原理
三维激光扫描系统主要由三维激光扫描仪主机、激光扫描镜、三脚架、球形标靶、平面标靶、三维激光数据处理软件以及其他附属设备构成[3-4](图1)。基于三维激光扫描技术的精矿盘库测量是基于激光测距原理,首先利用扫描仪发射的激光束,计算反射的时间差,推算出扫描中心与测量目标点的距离;然后通过扫描仪记录的水平角、垂直角等数据信息来解算物体表面扫描点的三维坐标[5-6]。扫描坐标系如图2所示,是以扫描中心为坐标原点,通过坐标原点且相互垂直的2个轴为X轴和Y轴,Z轴垂直于X、Y轴所成的平面,3个坐标轴组成右手坐标系,P点即为所需测量的点,P′点即为P点在XOY平面上的投影点[7-8]。

图1 三维激光扫描仪

图2 三维激光扫描测量原理
采用三维激光扫描仪进行盘库测量时,应首先根据现场情况,选择通视良好的地点进行分站扫描,不同测站之间用公共标靶球进行连接,利用GPS对标靶球中心进行测量,为后期数据拼接和坐标转换提供基础数据;然后对点云数据分别进行拼接、剔除噪声点、重采样、封装处理,构建精矿三维模型;最后根据构建的三维模型计算精矿量(图3)。

图3 三维激光扫描仪精矿盘库测量流程
2 工程应用
以西石门铁矿2017年6月30日精矿库存量为例(图4),分别采用三维激光扫描仪和传统GPS测量方法进行盘库测量。

图4 西石门铁矿精矿仓分布
2.1 GPS测量方法
外业测量采用华测X91 GPS接收机,其水平精度为±(10+1×10-6D)mm(D为测量距离),垂直精度为±(20+1×10-6D) mm。为保证测量精度,平坦区域每3~5 m采集1个坐标点,对凹凸不平或地形起伏较大区域进行加密测量。外业完成后,采用南方CASS 9.1软件的三角网法进行数据处理。三角网法是根据实测精矿表面点坐标(X,Y,Z)和平场标高,来生成一系列不规则三角形,通过计算每一个三角锥的精矿量,最后累加得到整个区域的精矿量。
2.2 三维激光扫描仪测量方法
本研究采用的三维激光扫描仪型号为Z+F IMAGER 5010,该型仪器换站测量时无需对中整平,测程为187.3 m,每秒可以获取百万点云数据。数据处理软件采用Z+F LaserControl和Geomagic Studio。本研究测量共分4个测站,不同测站之间用公共标靶球进行连接,采用GPS-RTK测量标靶球的实际坐标,将不同测站的点云数据进行拼接。
2.2.1数据采集
(1)分站扫描。根据现场实际情况,在精矿体的4个角点进行设站,分站对精矿进行三维激光扫描,不同测站之间用公共标靶球进行连接,相邻测站之间需有一定的重叠区域,避免数据遗漏。
(2)靶标球测量。为将各测站的扫描数据进行有效拼接,必须确保相邻两站之间至少有3个公共靶球,并用GPS-RTK测量每个靶球中心的绝对坐标。
2.2.2数据处理
2.2.2.1数据拼接
不同测站的扫描数据对应的坐标系各不相同,要得到精矿的整体信息需要对不同测站的原始点云数据进行拼接。本研究选择Z+F Laser Control软件“Register”拼接模块,分别打开每一站数据,查找到站内的球形标靶进行识别,将不同位置的标靶进行编号,并确保多站中同一个标靶的编号相同。所有测站的标靶标识完毕后,选择标靶拼接方式及拼接算法,利用Z+F Laser Control软件的最小二乘算法进行点云拼接,拼接后的点云数据如图5所示。

图5 拼接后的整体点云数据
2.2.2.2坐标转换
拼接后的点云数据采用的是相对坐标系,需要将其转换为绝对坐标。本研究将通过GPS-RTK获取的公共标靶球的绝对坐标数据导入Z+F Laser Control软件“管理已知标识”栏中,将扫描数据转换为绝对坐标(图6)。
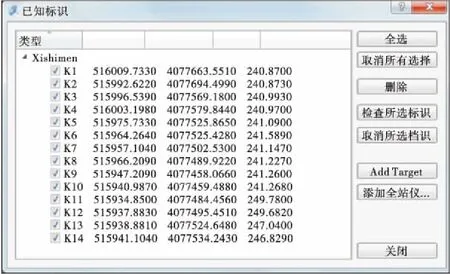
图6 导入绝对坐标数据
2.2.2.3噪声点剔除
在数据获取过程中,由于仪器精度、地表反射及其他环境因素的影响,不可避免地会产生一些噪声数据,该类数据的存在会导致整个点云数据含有粗差,影响后期数据建模精度。本研究采用Z+F Laser Control软件的滤波功能对点云数据进行滤波处理,剔除噪声数据。
2.2.2.4数据重采样
三维激光扫描仪采集的原始点云数据量大,间距小,并且不同测站拼接会有重叠区域。若不经过精简,直接建模,将占用大量计算机内存,影响后期数据处理效率,因而有必要对噪声点剔除后的点云数据进行重采样处理,减少数据量。重采样主要有随机采样、等间距采样和整体采用3种方法[9-10]。本研究采用随机采样方法对点云数据进行处理,重采样后的点间距为10~30 cm。
2.2.2.5数据建模
首先对重采样后的点云数据利用Z+F Laser Control软件的“非连接项”和“体外孤点”等功能进一步优化;然后采用Geomagic Studio软件的封装功能进行封装建模,若部分数据缺失,则生成的模型无法完全闭合,此时可以用Geomagic Studio软件的“填充孔”功能进行修补,即可生成完整的精矿三维模型,模型生成后还可利用该软件的“网格医生”功能进行进一步优化,优化后的三维模型如图7所示。

图7 精矿三维模型
2.2.2.6精矿量计算
根据构建的精矿三维模型和设定的平场标高,本研究利用Geomagic Studio软件的体积计算功能计算精矿量。
2.3 对比分析
GPS测量和三维激光扫描测量得到的精矿量见表1。分析表1可知:三维激光扫描与GPS测量所得出的精矿量较接近,但前者获取的点云数据量远远多于后者,据此构建的精矿三维模型更贴合实际,因而计算出的精矿量可靠性较强;此外,三维激光扫描的作业时间仅为GPS测量的1/2,工作效率较高。

表1 精矿盘库测量结果对比
3 结 语
以西石门铁矿为例,提出了一种基于三维激光扫描技术的精矿盘库测量方法,并详细分析了方法原理及实施流程。研究表明:该方法获取的点云信息量大,构建出的精矿三维模型能够真实反映精矿堆存的实际情况,因而据此计算出的精矿量的可靠性优于GPS测量方法,并且该方法的作业效率相对于GPS测量方法而言也有明显优势。
[1]潘红飞,赵翠薇.基于TIN 模型较高精度土方量计算方法[J].价值工程,2012,31(5):63-65.
[2]李滨,冉磊,程承旗.三维激光扫描技术应用于土方工程的研究[J].测绘通报,2012 (10):62-64.
[3]王先鹏,曹荣林.土方量计算的原理与方法及ArcGIS的应用前景[J].地理空间信息,2009(4):139-141.
[4]欧斌,黄承亮.三维激光扫描技术在分方测量中的应用研究[J].城市勘察,2012(2):123-125.
[5]李现强.基于三维激光扫描技术的矿区数据采集及其模型构建的应用研究[D].南昌:东华理工大学,2013.
[6]闫腾飞,李元辉,徐帅,等.采空区三维激光扫描系统地理坐标定位方法[J].金属矿山,2015(5):135-139.
[7]柏雯娟.用三维激光扫描技术监测矿山开采沉陷[J].金属矿山,2017(1):132-135.
[8]马法成.某铁矿山隐伏采空区精准探测方法[J].金属矿山,2016(5):196-199.
[9]谢宏全,侯坤.地面三维激光扫描技术与工程应用[M].武汉: 武汉大学出版社,2013.
[10]黄有,郑坤,刘修国,等.三维激光扫描仪在测算矿方量中的应用[J].测绘科学,2012,37(3):90-92.
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
测绘地理信息(2022年2期)2022-04-02
文萃报·周五版(2021年45期)2021-11-17
陕西水利(2021年5期)2021-06-21
全球定位系统(2020年1期)2020-03-31
模具制造(2019年3期)2019-06-06
测绘通报(2017年2期)2017-03-07
世界博览(2015年20期)2015-09-10
现代营销·经营版(2015年3期)2015-04-20
大地测量与地球动力学(2014年3期)2014-02-13
