
并联混合动力汽车锥齿轮耦合器控制系统设计
2018-04-27 07:02张雪松李雪亭刘友朋
传动技术 2018年1期
张雪松 李雪亭 刘友朋
(1.中原工学院 机电学院,河南 郑州 450007;2.台达电子企业管理(上海)有限公司,上海 201209)
0 引言
混合动力汽车与传统车辆不同之处在于有多种动力源,包括发动机、电机、可充放电的能量电池。协调三种能量源的装置就是耦合器。常见耦合器有液力耦合器、锥齿轮机构耦合器、行星齿轮机构耦合器等。液力耦合器是通过电磁阀控制油液压力和流量达到控制目的,电磁阀一般为成本较高的比例流量阀,为保证控制精度液力耦合器对油液清洁度要求很高,但是液压油粘度容易受环境温度影响而油液温度变化导致压力发生变化,从而影响整个系统的控制性能。此外液力耦合器需要一个储油罐,生产成本和维修成本比较高。而本文研究的锥齿轮机构耦合器结构和制造工艺相对简单,生产成本及维修成本较低。因整个执行机构的传动系都是机械传动,所以传动可靠,对环境的适应力强,不会因为环境温度等因素的变化而变化。
1 电机助力控制策略
电机助力控制策略是将发动机作为主动力源,电机驱动及储能电池作为辅助动力源,以保证发动机处于最佳工作状态,电机对发动机的输出转矩进行削峰填谷。电机也要保证能量电池的荷电状态保持在一定范围内。
2 并联混合动力汽车锥齿轮耦合器建模及控制设计
2.1并联混合动力汽车总体结构
并联混合动力汽车主要由发动机、电动机、蓄电池、减速器、主减速器、动力耦合装置等总成构成,其结构如图1所示。

图1 并联混合动力汽车传动系结构图
2.2并联混合动力汽车能量传送路线分析
并联混合动力汽车的能量需求在转矩耦合器处分为两路,一路为通过电机到能量存储系统的能量流,另一路为通过离合器到发动机的能量流。其中电机既可以充电又可以发电,还可以根据能量需求单独驱动车辆运行。
2.3锥齿轮耦合器工作原理介绍
耦合器为锥齿轮机构如图2所示,耦合器与发动机之间通过离合器传递转矩。耦合器锥齿轮1与离合器输出轴同轴,耦合器锥齿轮2与电机同轴,耦合器锥齿轮3与变速器输入轴同轴。该耦合器能实现发动机和电机的同轴输入,通过控制离合器的结合、分离能实现多种驱动模式的灵活切换。

图2 耦合器机械结构模型
耦合器工作原理:耦合器输出需求转矩是在循环工况下,将车轮、主减速器、变速器等车辆总成的需求转矩输入ECU计算出来的。
该转矩加上耦合器传递机械损失转矩得出耦合器需求输入转矩。先将所得到的耦合器需求输入转矩与耦合器发动机端实际输入转矩做比较。将发动机未满足的需求能量分配给电机,得到电机需求转矩。电机传递给耦合器的实际转矩与发动机传递给耦合器的实际转矩之和再减去耦合器传递机械损失转矩就是耦合器实际输出转矩。
2.4锥齿轮耦合器控制系统设计及Simulink建模
国内学者对耦合器的研究虽然不少,但是关于其控制系统设计的相关文献却不多。耦合器控制的功能及要求主要有下面几方面:
1)输出动力不发生干涉。耦合装置需保证来自不同动力装置的机械动力彼此间不发生运动干涉,不影响传动效率。
2)动力合成。将来自不同动力装置的机械动力合成,实现混合动力驱动工作模式。
3)动力分解与能量回馈。耦合装置应允许将发动机动力全部或一部分传递给电机,电机以发电模式工作,为动力电池组充电,还可以整车制动时实施再生制动,回收制动能量。
4)辅助功能。耦合装置应能充分利用电机低速大转矩的特点实现车辆起步,利用电机反转实现倒车。
充分考虑上述要求,结合并联混合动力汽车的工作需求及特点,设计耦合器控制系统。
将发动机作为汽车主驱动源,电机作为辅助动力源。使电机对发动机输出转矩进行削峰填谷,同时将蓄电池组的SOC值保证在一定范围内。设计的耦合器控制系统如下。
控制系统设计原理如图3:
该耦合器控制系统需要三个输入信号,产生三个输出信号。下面根据三个不同的输出信号及其数学模型来阐述控制系统的内部结构。
(1)耦合器输入端需求转矩
根据系统能量守恒原理,考虑耦合器转矩损耗,可得到耦合器输入端需求转矩与耦合器输出端需求转矩关系如下:
TIRcp=TORcp+Tlosscp
(1)
nIRcp=nORcp
(2)
耦合器输入端需求转速等于耦合器输出端需求转速。

图3 耦合器控制系统设计流程图
其中TIRcp为耦合器输入端需求转矩,TORcp为耦合器输出端需求转矩,Tlosscp为耦合器损失转矩。nIRcp为耦合器输入端需求转速,nORcp为耦合器输出端需求转速。
Simulink模型如下图4:

图4 耦合器Simulink模型内部结构1
图4所示模型1中,耦合器输入端需求转矩等于耦合器输出端需求转矩加上耦合器损失转矩的和。其中,耦合器损失转矩为定常数。若耦合器需求输出转速小于零则损失转矩为零。
(2)耦合器电机端输入需求转矩
根据功率平衡原理,计算电机需求输入转矩和转速如下:
TRmcp=(TRcp-TAfcp)×Kmf
(3)
nRmcp=fmin(nAfcp,nORcp)×Kmf
(4)
其中,TRmcp为耦合器电机端输入需求转矩,TRcp耦合器输入端需求转矩,TAfcp为经离合器传递的发动机端实际转矩,Kmf为电机与发动机转速比,nRmcp为耦合器电机输入端需求转速,nAfcp为耦合器发动机输入端实际转速,nORcp为耦合器输出端需求转速。
Simulink模型如下图5:

图5 耦合器Simulink模型内部结构2
图5所示模型2中,耦合器电机端输入需求转矩等于(1)中所得耦合器输入端需求转矩减去经离合器传递的发动机端实际转矩的差,再除以电机与发动机转速比。
耦合器电机端输入需求转速等于耦合器需求输出转速与经离合器传递的发动机端实际转速两者中的最小值,乘以电机与发动机转速比。
(3)耦合器输出端实际转矩
通过定义电机转速与发动机转速比,由功率平衡关系得到耦合器实际输出转矩和转速如下:
TOAcp=TAmcp×Kmf+TAfcp-Tlosscp
(5)
nOAcp=fmin(nAmcp/Kmf,fmin(nAfcp,nORcp))
(6)
其中,TOAcp为耦合器输出端实际转矩,TAmcp为耦合器电机端实际输入转矩,TAfcp为经离合器传递的发动机端实际转距。
Simulink模型如下图6:

图6 耦合器Simulink模型内部结构3
图6所示模型3中,耦合器输出端实际转矩等于耦合器电机端实际输入转矩与电机与发动机转速比之积,加上经离合器传递的发动机端实际转距,再减去耦合器损失转矩。
耦合器输出端实际转速等于耦合器电机端实际输入转速与电机与发动机转速比之积,同(2)中所得耦合器需求输出转速与经离合器传递的发动机端实际转速,两者中的最小值之间的最小值。
在Simulink里搭建的耦合器控制封装模型如图7:
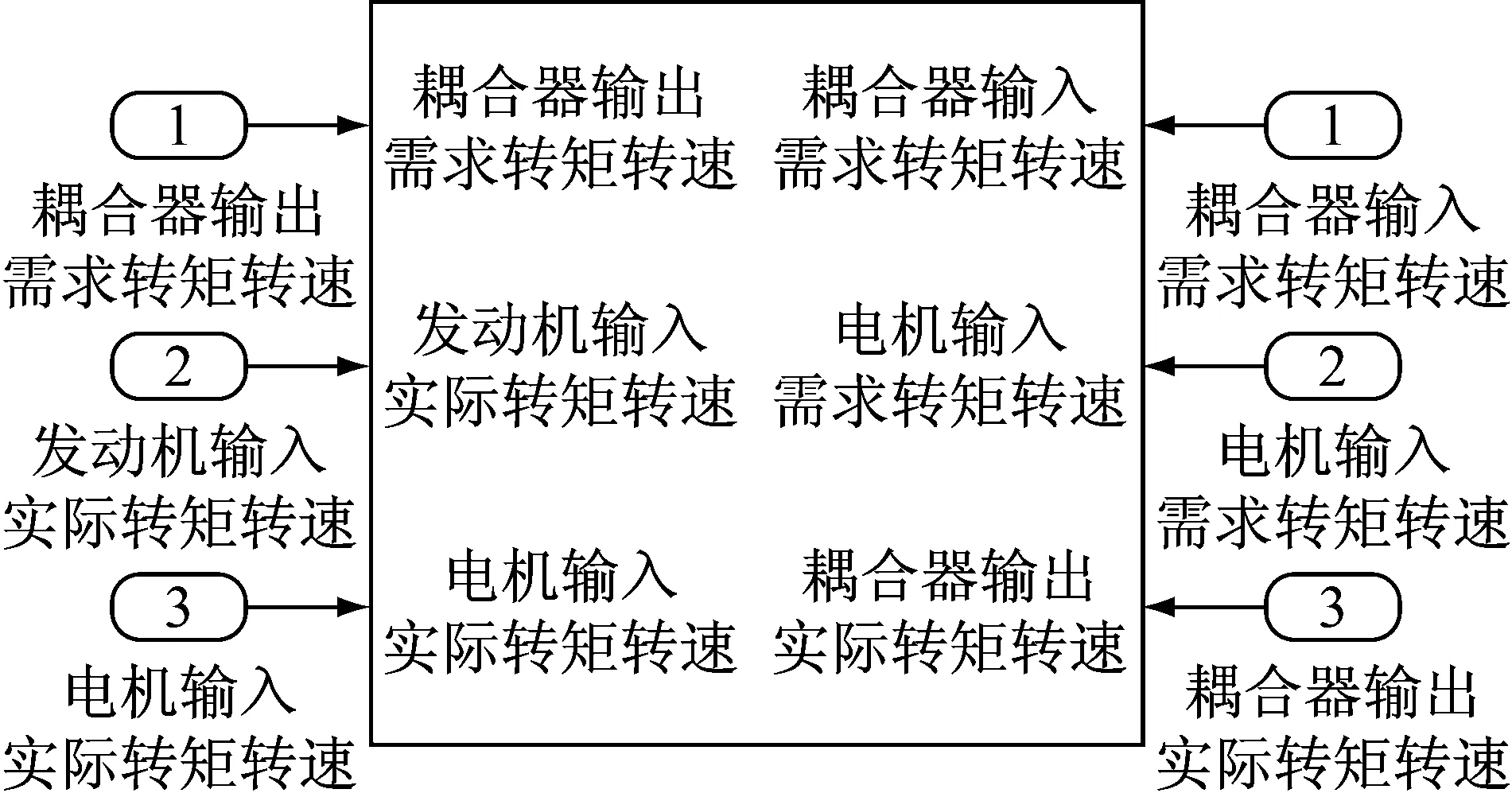
图7 耦合器控制系统
耦合器控制系统是由上图所示三个输入及三个输出信号经公式(1)至(6)建立的数学模型搭建的控制系统。
耦合器Simulink模型内部总结构如下图8:

图8 耦合器Simulink模型内部结构总图
图8所示为耦合器控制系统的Simulink仿真模型。该锥齿轮耦合器与传统的行星机构动力耦合器比较,机械结构更加简单,因而控制系统算法也比后者简单,系统运行速度更快。
3 仿真结果及分析
3.1耦合器控制模型数据来源
以某城市循环工况为数据来源研究并联混合动力汽车离合器控制。循环工况数据如下:
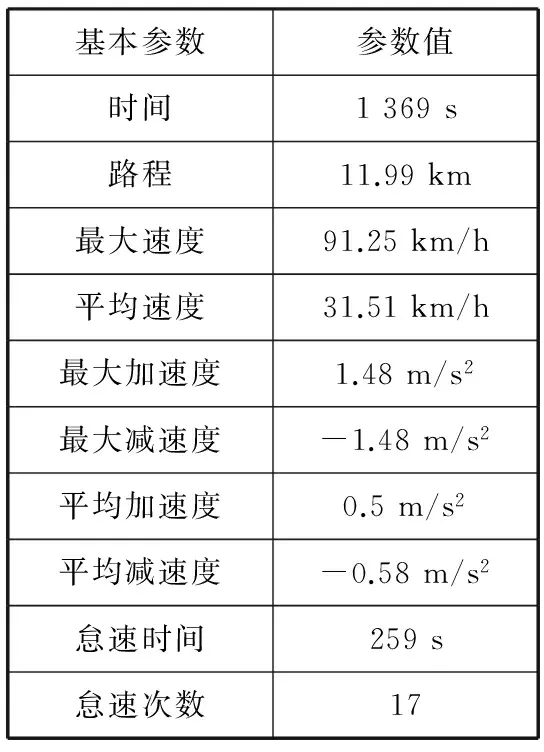
表1 某城市循环工况基本参数
3.2耦合器控制模型仿真结果及分析
通过对上面所建的锥齿轮耦合器控制模型进行仿真运行,分别得到耦合器输出需求转矩曲线、耦合器输入需求转矩曲线、发动机输入实际转矩曲线、电机输入需求转矩曲线,如图9~14所示。

图9 耦合器输出需求转矩曲线图

图10 耦合器输入需求转矩曲线图
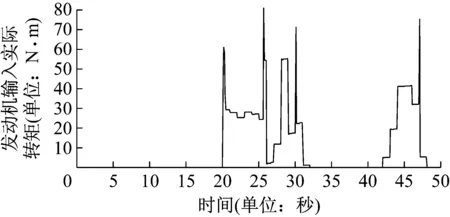
图11 发动机输入实际转矩曲线图

图12 电机输入需求转矩曲线图

图13 电机输入实际转矩曲线图

图14 耦合器输出实际转矩曲线图
图9、图11的仿真结果表明,汽车起步时所需转矩由发动机提供61 N·m,由电机提供180 N·m。发动机转矩与电机转矩经耦合器减速增距齿轮机构共提供363 N·m转矩,起步为小油门电机助力起步,既节能又环保。
图11、图12、图13仿真结果表明在26秒、31秒、33~38秒、43秒左右发动机通过电机给能量电池充电。其中33~38秒左右,发动机无需求转矩为制动制动能量回收,将制动时发动机的惯性转矩通过电机将机械能转换成电能给电池充电。说明该控制能很好的利用发动机能量大大提高了发动机的机械效率,实现燃油经济性最佳。
图9和图14的仿真结果证明耦合器输出需求转矩与耦合器输出实际转矩相等。该耦合器控制模型能很好实现并联混合动力汽车的能量分配。
4 结论
1. 锥齿轮机构耦合器与传统的行星齿轮机构耦合器比较,结构更简单。通过离合器与发动机的机械连接实现发动机动力的中断与传递。在简化了耦合器的机械结构的同时,也使其控制系统更简单。只需两对锥齿轮就可以实现发动机、电动机及能量电池三种能量源的动力整合及需求能量分配。
2. 根据锥齿轮耦合器工作原理建立了控制系统模型;
3. 对建立的锥齿轮耦合器Simulink模型进行了仿真分析,结果表明,该耦合器控制策略能很好的实现并联混合动力汽车的能量管理。完全满足并联混合动力汽车耦合器的功能需求,同时耦合器在动态运行时的仿真控制参数可为生产企业提供数据依据和参考。为丰富和完善并联混合动力汽车耦合器设计以及提高其运行可靠性,提供有效保障。
[1] 邹乃威,刘金刚,周云山,张友坤,黄伟,蔡源春. 混合动力汽车行星机构动力耦合器控制策略仿真[J].农业机械学报, 2008 , 39 (3):5-9.
Zou Naiwei, Liu Jingang, Zhou Yunshan, Zhang Youkun, Huang Wei, Cai Yuanchun. Simulation of Control Strategy for HEV Coupler with Planetary Mechanism[J].Transactions of the Chinese Society for Agricultural Machinery,2008,39(3):5-9.
[2] 韦军,聂巧丽,程凯,牛礼民. 并联式混合动力汽车自动变速耦合器设计[J].汽车工程师,2013(11):32-35.
Wei Jun,Lie Qiaoli,Cheng Kai, Niu Liming. Design of PHEV Automatic Transmission Coupling[J]. Auto Engineer, 2013(11):32-35.
[3] 张仲良,钱正纵,陈杰. 城市客车并联液压混合动力系统参数匹配[J].中国公路学报,2013,26(3):176-182.
ZHANG Zhong-liang,QIAN Zheng-zong,CHEN Jie. Parameter Matching of Parallel Hydraulic Hybrid System for Urban Bus[J]. China Journal of Highway and Transport, 2013,26(3):176-182.
[4] 曾小华,于永涛,宋大凤,王庆年. 基于差速耦合的混合动力汽车传递特性分析与控制[J].吉林大学学报(工),2010,40(1):1-5.
ZENG Xiao-hua, YU Yong-tao, SONG Da-feng, WANG Qing-nian. Transmission analysis and control for the differential coupling hybrid electric vehicle[J]. Journal of Jilin University(Engineering and Technology Edition), 2010,40(1):1-5.
[5] 曾小华,王庆年,王伟华等.基于ADVISOR软件的双轴驱动混合动力汽车性能仿真模块的开发[J],汽车工程,2003,25(5):424-427.
Zeng xiao-hua,Wang Qing-nian,Wang Wei-hua,et al. The development of a simulation module for the performance of two-axle drive hev based on advi-sor software[J].Automotive Engineering, 2003, 25(5):424-427.
[6] 柯进益.新型电控液驱客车设计研究[J].南京理工大学,2004.
KE Jinyi. Design and Research of Hydraulic Driving Bus Based on a New Electronic Control[J].Nanjing University of Science and Technology,2004.
[7] 杨 帆,夏怀成,李春华. 混合动力公交客车自动离合器电机控制系统设计[J].吉林化工学院学报,2015,32(1):43-47.
YANG Fan,XIA Huai-cheng,LI Chun-hua. Design on Automatic Clutch Motor Control System of Hybrid Electric Bus[J]. Journal of Jilin Institute of Chemical Technology,2015,32(1):43-47.
[8] 翟涌,唐高强,胡宇辉,席军强. 并联混合动力客车模式切换过程控制研究[J].北京理工大学学报,2016,36(1):53-58.
ZHAI Yong,TANG Gao-qiang,HU Yu-hui,XI Jun- qiang. Process Control of Mode Switch for Parallel Hybrid Electric Buses[J].Transactions of Beijing Institute of Technology,2016,36(1):53-58.
[9] 倪成群,张幽彤,赵强,BOUKEHILI Adel.混合动力离合器结合过程的动态转矩控制策略[J].机械工程学报,2013,49(4):114-121.
NI Chengqun,ZHANG Youtong,ZHAO Qiang, BOUKEHILI Adel. Dynamic Torque Control Strategy of Engine Clutch in Hybrid Electric Vehicle[J]. Journal of Mechanical Engineering, 2013,49(4):114-121.
[10] 赵丁选,李天宇,康怀亮,张志文,李牧菲. 混合动力工程车辆自动变速技术[J]. 吉林大学学报(工学版),2014,44(2):358-363.
ZHAO Ding-xuan,LI Tian-yu, KANG Huai-liang, ZHANG Zhi-wen, LI Mu-fei. Automatic shift technology of hybrid power engineering vehicle[J]. Journal of Jilin University(Engineering and Technology Edition),2014,44(2):358-363.
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
制造技术与机床(2019年11期)2019-12-04
电子制作(2019年23期)2019-02-23
北京汽车(2018年4期)2018-09-08
消费导刊(2018年8期)2018-05-25
制造技术与机床(2017年3期)2017-06-23
汽车维修技师(2017年9期)2017-02-04
燕山大学学报(2015年4期)2015-12-25
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
