内河繁忙水域船舶航行风险平行管控系统设计
2018-05-07 11:12徐武雄初秀民雷进宇
中国航海 2018年1期
徐武雄, 初秀民, 雷进宇
(1.湖北科技学院 电子与信息工程学院,湖北 咸宁 437100;2.武汉理工大学 国家水运安全工程技术研究中心,武汉 430063)
内河繁忙水域船舶航行风险平行管控系统设计
徐武雄1,2, 初秀民2, 雷进宇2
(1.湖北科技学院 电子与信息工程学院,湖北 咸宁 437100;2.武汉理工大学 国家水运安全工程技术研究中心,武汉 430063)
基于平行控制的原理提出内河繁忙水域船舶航行风险管控系统的设计方法,并对其结构和关键技术进行研究。阐述船舶航行风险管控平行控制的基本原理;构建内河繁忙水域船舶航行风险平行管控系统的框架并介绍其功能;探讨内河繁忙水域船舶航行风险平行管控系统的关键技术。通过研究,为提高内河繁忙水域船舶交通安全监管的科学化和智能化,减少船舶交通管理系统(Vessel Traffic Services,VTS)监管水域船舶航行安全监管中的人为失误,减轻海事监管人员的工作压力,降低船舶航行风险提供参考,推动智慧海事的发展。
繁忙水域;航行风险;平行控制;可视分析
我国江河湖泊众多,内河水运资源丰富,现已基本形成以长江干线、西江干线、京杭运河、珠江三角洲及长江三角洲航道网为骨干的干支直达和江海互通的全国航道网。近年来,水路运输受到国家和各级政府的高度重视,已逐步发展成为我国综合交通运输体系中的重要组成部分。这在使船舶快速增多、水上运量快速增长的同时,增加了水上交通的航行风险。尤其是在交通繁忙水域,日均船舶断面流量可达到饱和状态,在这些水域航行风险非常高。为保证在这些水域航行的安全性,海事部门采取了许多措施来降低通航风险、提高通航效率,其中应用最广泛、最有效的措施是建立船舶交通管理系统(Vessel Traffic Services, VTS)。[1]
VTS是利用船舶自动识别系统(Automatic Identification System,AIS)基站、雷达、闭路电视监控系统(Closed Circuit Tele Vision,CCTV)、无线电话及船载终端等通信设备对航行在VTS监控水域内的船舶进行监控,为船舶提供航行中所需的安全信息的交通管理系统。[2]VTS为保障所监管水域船舶的安全通航发挥了重要作用,但存在以下不足:
1)缺乏监管船舶交通态势和航行风险评估功能。
2)涉及船舶、通航环境、航行规则与法规、人员(VTS管理人员、船员等)、VTS通航信息感知系统、数据处理系统及VTS人机交互系统等诸多内容,是一种数据驱动的交通管理复杂系统,对VTS操作人员的专业技能和素质的要求极高。
3)VTS监管水域多为繁忙水域,船舶交通流密集,VTS不具备异常状况感知、预警和决策的功能,这些功能只能通过人工实现,而人的精力和能力都有限,可能出现误判和漏判的情况,使得VTS操作人员的工作负荷和精神压力极大。
为弥补VTS的不足,对内河繁忙水域船舶航行风险平行管控系统进行研究。首先阐述船舶航行风险管控平行控制的基本原理;其次构建内河繁忙水域船舶航行风险平行管控系统框架并介绍其功能设计;最后探讨该系统的关键技术并进行总结。
1 平行控制原理
交通系统是一个多学科、跨领域的复杂系统。单纯采用传统的反馈控制和现代控制等方法已不能对这种复杂系统进行较为有效的控制和管理。对此,王飞跃[3]针对平行系统提出一种新的控制方法——平行控制。
平行控制是由某个自然的现实系统和对应的1个或多个虚拟的或理想的人工系统组成的系统,是在大数据和数据驱动的基础上迈向计算控制科学的一种途径。平行控制是基于ACP的方法[4]得到的,其原理见图1。ACP是指人工社会、计算试验和平行执行的有机组合。在该框架下,有3种主要的工作模式, 即:学习与培训、试验与评估及控制与管理。

图1 平行控制与管理原理图
针对基于ACP 的平行控制,相关科研人员已开展多年的研发和应用工作,并已在社会经济和国家安全等领域的应用中取得显著成效。梁吉业等[5]提出人工交通系统的基本系统构成和框架、主要建模和研究方法及分析手段和可能的应用方式,为对复杂的交通系统实行平行控制提供经验。宁滨等[6]针对目前城市轨道交通中亟待解决的安全、高效和可靠运行等方面的关键问题, 运用复杂系统研究中的人工交通系统、计算试验和平行执行方法,提出基于ACP方法的城市轨道人工交通平行系统体系研究。唐少虎等[7]给出基于平行系统理论的路段行程时间预测模型,设计基于集散波的行程时间计算试验方法,提出多模型自适应行程时间预测并给出模型动态优化策略,同时通过试验证明该方法的有效性。杨柳青等[8]为解决当前城市停车愈加困难的问题,提出基于ACP方法的城市平行停车系统,通过平行执行的方式完成人工停车系统与实际停车系统滚动优化等主要过程。
综上所述,平行控制理论和方法对复杂交通系统的控制与管理是有效的。这种方法目前主要应用在道路和轨道交通领域,还未见在水上交通领域应用的实例。VTS是一个典型的复杂系统,交通要素包括船舶、人员、航道、水文、气象、管理和法规等,通过构建VTS的平行系统,利用平行控制的方法进行控制和管理是一种新的有效方法。
2 内河繁忙水域船舶航行风险平行管控系统框架与功能设计
基于ACP方法构建的内河繁忙水域船舶航行风险平行管控系统框架见图2。系统由实际VTS和人工VTS组成,这2个系统构成平行管理系统。数据采集平台对雷达,AIS,VHF和CCTV等监管设备生成的数据进行汇集并存储在数据仓库中,同时将水文和气象部门发布的水文及气象信息汇集到数据仓库中。数据仓库作为数据中心,在给实际VTS提供监管水域所需的实时水上交通数据的同时,给人工VTS提供历史的和实时的水上交通数据。

图2 内河繁忙水域船舶航行风险平行管控系统框架
设计人工VTS是构建整个平行系统的关键。人工VTS由通航环境设置子系统、交通流生成子系统、船舶行为识别子系统、航线风险评估子系统、可视化子系统、电子航道图子系统及管理和决策子系统等子系统构成,可模拟实际的交通状况,生成仿真交通流。通航环境设置子系统可对交通环境参数进行设置,以便模拟不同条件下的交通状态;交通流生成子系统可根据交通流的历史数据,采用蒙特卡洛方法生成仿真交通流;船舶行为识别子系统对船舶的行为特征进行挖掘,对船舶的异常行为进行分类和识别;航线风险评估子系统可对交通流的动态演化过程进行分析,对可能出现的风险进行计算和预测;电子航道图子系统为可视化提供背景;管理和决策子系统可根据交通状态对交通组织及调度方式进行调整,为实际VTS的交通控制和管理提供最优的方案。
可视化分析、高性能计算机平台和交互控制是连接监管者与人工VTS的桥梁。可视化分析模块通过可视化界面的视觉呈现,利用数据可视化方法辅助用户对VTS监管水域复杂的船舶航行态势及航行风险进行分析决策;交互控制为人机对话提供接口和方法,加速海事人员对当前态势及风险可视化结果的理解和分析;高性能计算机平台包括高性能计算、并行计算、高性能仿真引擎和仿真资源管理等,能保证在异构环境下的负载共享、多机容错、复杂的作业管理及调度和大规模并行计算等,用于实现对各类仿真资源的综合利用和管理及仿真模型的高效运行,为仿真模型及应用的开发、运行、重用和互操作提供集成环境。
平行系统有3种工作模式:
1)学习和培训。人工VTS可为管理人员提供一个学习和培训的模拟平台,使其熟悉和掌握VTS的基本操作及交通态势的发展变化过程。
2)试验与评估。通过改变仿真参数,可在人工VTS上开展各种试验,以评估不同通航条件下交通的态势及不同组织和调度方式的优劣,获得最优的控制和管理方案。
3)平行执行。实际VTS和人工VTS可同时运行,这2个系统的控制和管理方案均由人工VTS提供,实际VTS在运行过程中将运行效果反馈给人工VTS,人工VTS对效果进行评估,若效果不理想,再在人工VTS中对方案进行调整,并通过计算试验进行测试,将调整好的方案再次提供给实际VTS以对原来的方案进行优化,这样就构成一个完整的闭环控制和管理系统。
3 航行风险平行管控系统关键技术
船舶航行风险平行管控系统是一个由数据驱动的复杂系统,包含数据集成、人工VTS船舶行为识别、船舶交通态势评估与风险预测和平行管控系统多维参数可视化等关键技术。
3.1 数据集成技术
水上交通信息具有多源和异构等特性,采用数据仓库与中间件技术相融合的数据集成方法(见图3)[9],其中ETL(Extraction Transformation Loading)过程为数据的整理转换和映射复制过程[10]。用户通过数据仓库与中间件交互,中间件在全局模式的基础上通过ETL过程将用户指令交付给数据源,数据源通过ETL过程将返回指令交付给中间件。这种数据集成方法既能满足数据更新频繁、数据实时性和一致性要求高的情况,又能适合数据异构分布、网络延迟大、需快速处理和进行备份的场合。
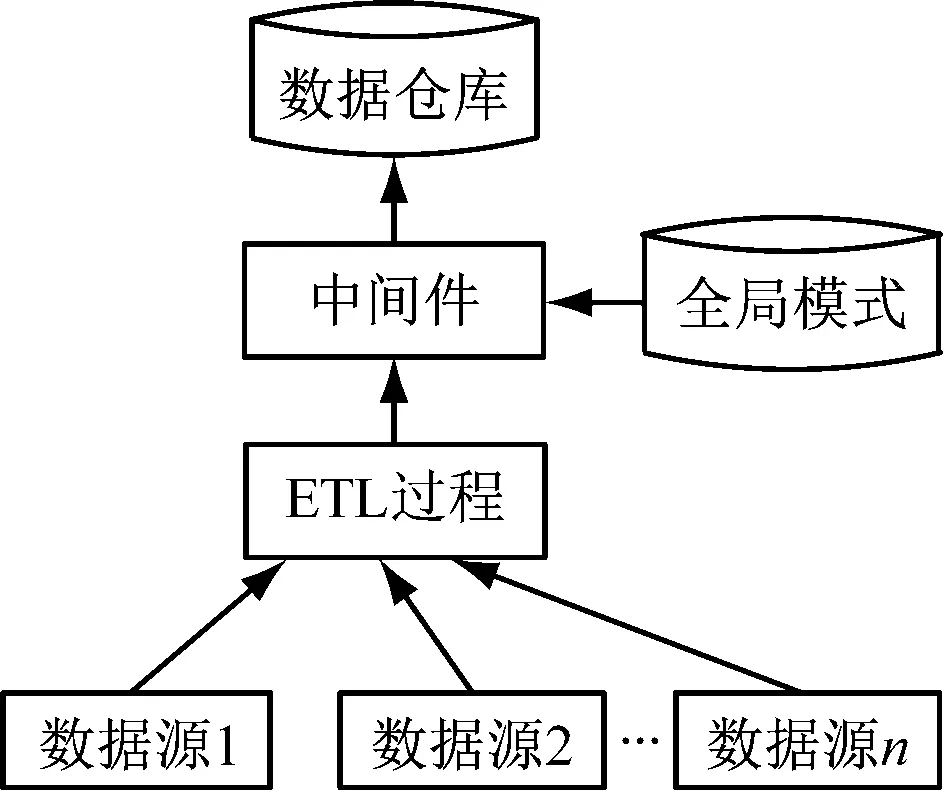
图3 数据集成技术
3.2 人工VTS船舶行为识别技术
3.2.1人工VTS船舶行为特征数据挖掘
3.2.1.1 船舶属性特征选择算法
船舶属性信息是进行航行行为识别和航行风险预测的基础数据。由于船舶属性信息众多,因此如何选取有效的属性特征是船舶行为识别需解决的问题。
Filter型特征选择算法不依赖任何学习算法,仅依靠特定的特征评价准则(如Fisher分值、互信息、对称不确定性度量)完成特征的选择。[11]该类算法不仅运算速度快,而且分类效果比较好。因此,采用Filter型的基于两阶段评价的特征子集搜索流程算法来选择船舶属性。该算法能有效降低船舶属性信息维数,从而提高船舶风险预测计算量。
3.2.1.2 船舶时空轨迹聚类算法
轨迹聚类的目的是通过分析轨迹的时间和空间属性特征,将相似的轨迹聚集到一个集合中,从而发现船舶的运动特征和行为模式。采用子空间聚类(CLustering In QUEst, CLIQUE)算法对船舶轨迹进行分析。[12]
3.2.2人工VTS船舶行为识别方法
在VTS的日常监管中,对船舶异常行为进行识别是非常关键的,及时发现船舶的异常行为并采取适当的处置措施可降低交通事故的发生率。船舶的异常行为通常表现为船舶速度异常(过慢或过快)、船舶轨迹异常(偏离正常的航线)和船舶吃水异常(船舶超载)等。[13]异常识别分析是根据船舶行为的历史记录提取出船舶运动总体的宏观行为特征,由此找出与总体特征差异较大的个体行为。船舶的异常行为通常是偶发的,生成的异常数据较少,本文采用机器学习的方法对船舶异常行为进行识别。
由于船舶异常行为样本较少,因此采用改进的P范数稀疏重构方法识别船舶异常行为。首先将所有的字典轨迹和测试轨迹标准化;然后根据P范数稀疏重构算法计算船舶航行轨迹的稀疏系数矩阵,同时计算轨迹的相似度值,根据相似度值对船舶行为进行识别和划分;最终输出测试样本的船舶航行行为类别。
3.3 船舶交通态势评估与风险预测技术
3.3.1VTS监管繁忙水域船舶交通态势演化
将繁忙水域船舶交通态势模型分为3个层级[14-15](见图4),其中:第1层用于感知目前环境的状态、属性及动态相关因素和环境影响关键因素;第2层通过对关键因素进行综合,并根据显著事件与因素的关联,理解当前态势;第3层反映最近趋势的变化情况并提供态势预警,使应对决策更加科学、及时。

图4 交通态势评估框架
3.3.1.1 数据采集及特征提取(感知层)
数据采集及特征提取是交通态势评估的基础。通过对环境感知数据进行采集,构建相关的航行静态特征及数据集;以静态数据为支撑,研究单艘船舶的相关移动特性;以区域为观测对象,抽取所有单艘船舶的区域特性,完成对区域流动性、聚散性和区域速度等3个表征特性的获取。
3.3.1.2 特征分析及融合处理(理解层)
通过对提取到的特征进行分析,实现对当前态势的评估。某些特征(如聚散性、移动性等特征)是无法用定量方式来描述的,本文采用Adaboost的算法构建特征的描述隶属度函数。
3.3.1.3 态势预测(预测层)
在交通特征提取及交通态势评价函数的基础上,采用神经网络预测模型对交通态势进行预测,同时将态势预测结果细分为基于交通流的汇聚趋势、流动趋势及基于多粒度的航行态势,针对不同态势构建其输入特征及输出结果。
3.3.2船舶交通航行态势与风险多粒度计算
3.3.2.1 多粒度计算
观测者在进行风险观测和调度操作时,所采用的视角通常是不固定的,如观测者需知道某艘具体船舶的碰撞风险及其航行态势,或需某区域的风险分布及交通流状态等。因此,引入多粒度的计算方式可给观测者呈现更多的视角及更丰富的信息。[16]
以船舶数量为粒度的载体,以单艘船舶为最小粒度,以单个海事监管人员负责的整体航行区域为最大粒度,构建一种自适应粒度划分方式。粒度越小,粒度空间内包含的船舶数量越少;粒度越大,粒度空间内包含的船舶数量越多。
粒度的层次越深,粒度越细,代表地理空间越小。粒度表示聚类结果簇的大小,而簇由密度大小决定。这里的层数代表使用密度的个数,在密度确定之后,算法就会产生一个带有次序的聚类结果,该次序即表示簇之间的关系。
本文采用OPTICS(Ordering Points To Identify the Clustering Structure)聚类算法实现自适应粒度划分。VTS操作人员在海事地图上随机框选一片区域,通过对该区域的船舶进行OPTICS聚类,即可得到自适应的粒度划分。OPTICS是一种基于密度的聚类方法,能根据密度的高低生成一个次序,该次序结构所包含的信息相当于从多次不同参数设置范围内获取的多个基于密度的聚类结果的簇,从而形成具有树型结构的聚类。
3.3.2.2 多粒度航行风险计算
在不同粒度的观测空间内对航行态势的偏重各有不同。在微观粒度空间内,若观测对象为单个船舶,则航行态势计算更侧重于该船与其他船舶的碰撞风险及该船自身的异常航行风险;在更大的粒度空间内,更侧重于对整体交通流态势的观测。
① 单船航行风险。单船船舶碰撞事故的实时风险可表示为
R=PC
(1)
式(1)中:R为繁忙水域船舶碰撞事故的风险;P为船舶碰撞和搁浅事故发生的概率;C为事故的后果。
对于P的计算:首先依据船舶预测运动矢量与他船的动态船舶领域的几何关系判断船舶会遇的概率;然后通过动态风险建模和贝叶斯网络概率推理计算各类致因因素作用下的碰撞概率。
对于C的计算:根据《船舶交通事故调查》报告,将事故相关信息分为环境类信息、船舶类信息和结果类信息等3类;根据数据实际情况,选择能见度、遇险月、日时间段和遇险区域等4类环境信息,选择船舶种类、船龄、总吨位、装载和船舶所有人等5类船舶信息及事故等级信息(即事故的后果信息)进行建模。同时,采用置信规则库专家系统建立船舶碰撞类事故后果实时预测模型,并对各类信息进行状态划分,对船舶碰撞类事故后果实时预测模型进行训练,以得到优化参数,提高预测效率。
在事故后果计算中,采用先验概率分布的方法对这些不确定数据进行处理。即当出现不确定数据时,利用几个基本置信结构代替该数据,各状态的信度则利用所有已知数据的分布来表示。
② 船舶交通簇风险。对于高粒度,将一片区域内的船舶划分成一个交通簇序列。交通簇的风险侧重于整体交通态势的风险及交通簇的内部风险。交通簇速度因子及交通簇整体密度是构成交通簇风险的2个重要因素。
3.3.2.3 VTS监管繁忙水域船舶交通航行风险预测模型
在交通态势评估及粒度计算的基础上,利用云模型建立针对VTS监管水域内的船舶交通航行风险的微观风险预测模型和宏观风险预测模型。
① 基于云模型的微观风险预测模型。以微观船舶行为(主要指避碰行为)为研究对象,度量本船周围的态势及通航状态对本船的影响,利用云模型中云发生器的概念构建对应的风险分布函数,生成相应的风险云函数,进而对其风险进行预测。[17]
基于单船航行风险的计算方法,计算得到每艘单船对应的风险值及相应的特征参数,记为p={x,t1,t2,t3},其中,x为其风险评价值,{t1,t2,t3}为其特征序列。利用云模型中的云变换方法得到每个x值的隶属云函数,通过云模型中隶属度判别的方式对其风险进行预测。
② 宏观风险预测模型。在不同粒度层级的交通风险计算中,采用云模型中的云综合方法对粒度层级进行综合及提升,构建通航区域整体的宏观交通流风险预测模型。云模型的定义及云综合的方法如下:
设论域U={u};A1(Ex1,En1,He1)和A2(Ex2,En2,He2)为论域U上的2个云模型。设U是一个用数值表示的定量论域,C是U上的定性概念。若定量值x属于U是定性概念C的一次随机实现,则x对C的确定度μ(x)∈[0,1]是有稳定倾向的随机数。
μ:U→[0,1],∨x∈U,x→μ(x)
(2)
期望Ex是云滴在论域空间分布的期望,是最能代表定性概念的点,是这个概念量化的最典型样本。将x看作是一个云滴,若Ex1 A3=A1∪A2 (3) Ex3=(Ex2+Ex1)/2+(En2+En1)/4 (4) En3=(Ex2-Ex1)/4+(En2+En1)/2 (5) He3=max(He1+He2) (6) 3.4.1基于态势感知模式的多层次信息可视化模型 依据态势感知中的感知层、理解层和预测层等3层模型建立不同的信息可视化模型,从而实现对船舶航行态势多层次、系统化的信息可视化。 (1)感知层可视化主要负责对通航环境要素及区域内船舶交通流总体特征进行可视化,例如对环境的状态、属性及船舶的静态特征和动态特征进行可视化。不同特征可采用不同的可视化方法。 (2)理解层可视化主要负责对当前水域内各要素之间的关联及水域态势特征信息进行可视化。对感知层可视化结果进行筛选缩放,形成VTS区域态势与通航要素的初步关联;采取散点图矩阵展示感兴趣的属性关联,加深对当前航行态势的理解。 (3)预测层可视化主要对水域内需预测的航行态势进行可视化展示,利用欧氏距离函数的OPTICS算法,采取渐进式聚类可视化方式并结合基于粒子系统的动画可视化方法,展示不同粒度下航行态势的动态变化。 3.4.2VTS监管水域船舶航行风险可视化 3.4.2.1 基于不确定性可视化的船舶航行风险多变量多维度展示方法 由于船舶航行风险是一种时变、多变量的集合模拟数据集,因此在对船舶航行风险进行可视化时借鉴集合数据的不确定性可视化方法,根据不同参数、不同分辨率下的输出研究风险模型参数敏感度,展示当前区域风险的不确定性。 首先利用核密度估计方法重构风险数据集合对象的高维分布;然后结合集合均值与集合分布差异描述不同集合数据对象之间的不相似性关系;最后利用基于拉普拉斯的不确定性感知降维投影方法将多维度、多变量的繁忙水域船舶航行风险信息投影至二维的可视化视图中,从而探索风险的分布模式等,并在多粒度计算的基础上结合人机交互技术展现不同粒度的风险值。 3.4.2.2 人机交互技术 在风险可视化系统中,除了视觉呈现以外,人机交互技术也是整个系统中的重要组成部分。由于大面积的监视水域和大规模的船舶交通集使人无法从有限的可视化空间中得到所有的启示,因此需加入人机交互技术,允许用户操作可视化视图对风险信息进行深层次的探索。采用概览、缩放、过滤、关联、记录及细节提取等交互技术。[18] 本文针对VTS管理决策与人机交互存在的不足,基于平行控制的原理,提出内河繁忙水域船舶航行风险管控系统的设计方法。研究了该平行控制系统的框架结构和关键技术,总结了船舶行为模式与异常识别理论,阐述了交通态势演化模型,提出了VTS监管繁忙水域船舶航行风险预测方法和VTS监管繁忙水域船舶交通管理多维参数可视化方法。该研究对减少内河繁忙水域船舶航行风险、提高安全监管人员的工作效率具有重要意义。此外,基于可视分析技术的船舶航行态势评估、航行安全风险计算和船舶航行决策等研究成果有助于海事人员提取海量数据背后的有用信息,提升监管业务能力,从而保障船舶安全航行。 然而,海事监管是一项复杂、庞大的任务,通常需将监管水域划分为多片小区域,由多名工作人员相互配合来完成。因此,如何建立多用户协作的VTS监管水域船舶航行风险态势可视分析方法、多屏幕监管区域边界信息共享机制等还有待研究。 [1] LEE G, KIM S Y, LEE M K. Economic Evaluation of Vessel Traffic Service (VTS): A Contingent Valuation Study[J]. Marine Policy, 2015, 61: 149-154. [2] 徐武雄,初秀民,刘兴龙. 水上交通信息可视化技术研究进展[J]. 中国航海,2015,38(1):41-46. [3] 王飞跃. 平行控制: 数据驱动的计算控制方法[J]. 自动化学报, 2013, 39(4): 293-302. [4] 王飞跃, 刘德荣, 熊刚,等.复杂系统的平行控制理论及应用[J]. 复杂系统与复杂性科学, 2012, 9(3): 1-12. [5] 梁吉业,冯晨娇,宋鹏. 大数据相关分析综述[J].计算机学报,2016(1):1-16. [6] 宁滨, 王飞跃, 董海荣, 等.基于ACP方法的城市轨道交通平行系统体系研究[J]. 交通运输系统工程与信息, 2010, 10(6): 22-28. [7] 唐少虎, 刘小明, 陈兆盟,等.基于计算实验的城市道路行程时间预测与建模[J]. 自动化学报, 2015, 41(8):1516-1527. [8] 杨柳青,王飞跃,张艳丽, 等.基于ACP方法的城市平行停车系统[J]. 指挥与控制学报, 2015, 1(4): 384-390. [9] 李伟卫, 李梅, 张阳, 等. 基于分布式数据仓库的分类分析研究[J]. 计算机应用研究, 2013, 30(10): 2936-2939. [10] 王世水, 王元元, 高应波. 基于ETL的数据集成优化研究与实现[J]. 天津工业大学学报, 2013, 32(3): 78-81. [11] 李智广, 付枫, 孙鑫, 等. 基于联盟博弈的Filter特征选择算法[J]. 计算机工程, 2013, 39(4): 230-233. [12] 向柳明, 周渭博, 钟勇. 基于高斯过程的CLIQUE改进算法[J]. 计算机应用, 2015, 35(2): 85-87. [13] 朱飞祥, 张英俊, 高宗江. 基于数据挖掘的船舶行为研究[J]. 中国航海, 2012, 35(2): 50-54. [14] ENDSLEY M R. Toward a Theory of Situation Awareness in Dynamic Systems[J]. Human Factors, 1995, 37(1): 32-64. [15] BRADY P W, WHEELER D S, MUETHING S E, et al. Situation Awareness: A New Model for Predicting and Preventing Patient Deterioration[J]. Hospital Pediatrics, 2014, 4(3): 143-146. [16] 陈玉明, 吴克寿, 孙金华. 基于知识粒度的异常数据挖掘算法[J]. 计算机工程与应用, 2012, 48(4): 118-120. [17] 张仕斌, 许春香, 安宇俊. 基于云模型的风险评估方法研究[J]. 电子科技大学学报, 2013, 42(1): 92-104. [18] 徐武雄,初秀民,刘兴龙. 船舶行为可视分析关键技术研究[J]. 武汉理工大学学报(信息与管理工程版),2015(5):451-454. Parallel-Control-BasedNavigationRiskManagementSystemforBusyInlandWaters XUWuxiong1,2,CHUXiumin2,LEIJinyu2 (1. School of Electronic and Information Engineering, Hubei University of Science and Technology, Xianning 437100, China; 2. National Engineering Research Center for Water Transport Safety, Wuhan University of Technology, Wuhan 430063, China) The structure and the key technology of the navigation risk management system of parallel control type are studied. After the principle of system design is briefly introduced, the framework of the system and the function design is described. The system for busy waters is studied in particular. The system will make contribution to navigation safety by reducing human errors, which otherwise might occur because of fatigue. busy waterway; navigation risk; parallel control; visual analytics 2017-11-20 国家自然科学基金(61273234;51479155) 徐武雄(1971—),男,湖北咸宁人,副教授,博士生,研究方向为交通流仿真及可视化。E-mail: xwxiong@qq.com 雷进宇(1989—),男,福建福州人,博士生,研究方向为船舶交通流可视分析。E-mail: jylei@whut.edu.cn 1000-4653(2018)01-0064-06 U676.1 A3.4 平行管控系统多维参数可视化技术
4 结束语
猜你喜欢
佳木斯大学学报(自然科学版)(2022年3期)2022-06-27
社会科学战线(2022年4期)2022-06-15
水上消防(2021年3期)2021-08-21
粉末冶金技术(2021年3期)2021-07-28
水上消防(2020年4期)2021-01-04
水上消防(2020年5期)2020-12-14
小型微型计算机系统(2020年10期)2020-10-21
汽车与安全(2020年1期)2020-05-14
文史春秋(2019年11期)2020-01-15
中国外汇(2019年19期)2019-11-26