小型航海保障工作船主推进及定位系统分析
2018-05-08 08:49于全虎
造船技术 2018年2期
于全虎
(江苏省船舶设计研究所有限公司, 江苏 镇江 212003)
0 引 言
目前国内航标监管、维护巡检和应急反应任务主要依靠小型航海保障工作船来完成,比较先进的船型有航标夹持船、电磁吸盘航标船等,航标抛设、撤除等作业一般由大、中型航标船承担。连云港港30万吨级航道配套新型航海保障工作船(以下简称新型航保船)是一型多用途小型航海保障工作船(见图1),其主要作业能力覆盖中、小型航标船,造价却低于中标船。对该船主推进和定位系统设计中的一些考虑进行阐述分析,希望对该型航标船的推广应用及后续优化提供一些基础研究。

图1 连云港港30万吨级航道配套新型航海保障工作船
1 小型航海保障工作船主推进和定位功能需求分析
小型航海保障工作船主要承担航标监管、维护巡检和应急反应任务,因此需要较高的航速,以满足快速反应的要求;作业时船舶必须在低航速下逐渐接近航标,这个过程中船与航标都存在独立的升沉、摇摆运动,所以船舶必须具有良好的操纵性和一定的稳定定位能力。
2 船舶推进系统形式特点分析
2.1 固定螺距螺旋桨推进系统
船舶最常规的主推进系统组成架构为主机、齿轮箱(包括离合器)、艉轴和固定螺距螺旋桨(Fixed Pitch Propeller,FPP,以下简称定距桨),其主要特点:
(1) 螺旋桨的最佳设计工况点只能有一个,即在主机额定转速下的最佳船、机、桨匹配点,螺旋桨的推进特性曲线与主机的负荷特性曲线不能完全吻合,往往依据船舶的主要用途来设计螺旋桨的水动力学特性。在船舶其他工况和轴系—螺旋桨转速下,机、桨匹配性均较差,螺旋桨不能充分发挥出主机的最佳功率,反而导致主机能耗增大。
(2) 组成结构简单,可靠性高,成本低,易于维护。
(3) 由于桨叶螺距是固定的,船舶的航行速度由螺旋桨的转速确定,桨的转速变化调节靠调整主机油门控制主机转速实现。船舶倒车需要通过主机换向或齿轮箱换向来改变艉轴—螺旋桨的旋转方向,大部分齿轮箱只能在低传动效率下维持短时间倒车状态。
(4) 柴油机存在最低稳定转速(即怠速),导致定距螺旋桨推进船舶的低速航行性能普遍不佳。
2.2 可调螺距螺旋桨推进系统
可调螺距螺旋桨(Controllable Pitch Propeller,CPP,以下简称可调桨)是通过在桨毂中设计一套操纵机构,操纵桨叶相对于桨毂转动从而进行螺距调节的螺旋桨。桨的推力和扭矩同时随转速和螺距比的变化而改变,从而改变船舶的航速并实现正车、倒车工况。可调桨装置主要由轴系、桨毂操纵机构、桨叶、配油器、液压操纵动力系统和电子控制系统等构成(图2为杭齿马森公司的可调桨推进系统),其主要特点[1]:
(1) 可调桨几乎可在船用柴油机上限曲线、最低稳定转速、最大转速线区域内任意搭配转速和螺距比,从而得到给定的航速、推力。
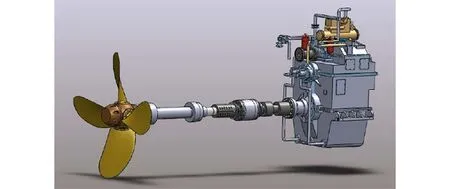
图2 可调桨推进系统
(2) 可调桨通过调节螺距,可以实现在任何工况下桨均能吸收主机全功率。重载时减小桨的螺距,轻载则增大螺距,可使主机保持不变的扭距和转速,配合相应的螺距比,主机能始终运行在额定功率下,对于需要多种航行工况的船舶,可发出较大的推力,保持较高的航速。
(3) 通过螺距角的正、负调节可操控船舶的前进和后退,与定距桨相比,可提供更大的反向推力;与定距桨反转须通过主机或齿轮箱换向相比,正车转倒车的时间更短;主机在高稳定转速时通过改变螺旋桨的螺距角可使船舶具有极慢的航速,极大地改善船舶的操纵避碰性能。
(4) 螺旋桨保持转速不变时,通过改变螺距进而改变推力、扭矩。船舶具有不同的航速,实现正车最大航速到倒车最大航速之间无级变速,能实现船舶超低速甚至微速航行,同时减少主机启动与停车次数,延长主机寿命。
(5) 可调桨通过调节螺距改变推力和方向,可使主机恒定转速运行。在船舶航行时将主机功率全部用于驱动船舶全速前进;在到达目的地作业时,主机的大部分功率可用于驱动作业设备。
(6) 桨的不同螺距对应不同的效率曲线,每一效率曲线上都有最大效率值,其效率比螺距不变的定距桨要高,经济性佳。
(7) 更便于集中遥控,顺应船舶自动化程度以及未来智能船舶的发展趋势。
2.3 全回转舵桨推进系统
全回转舵桨(以下简称全回转)推进系统的推进器实现舵和桨的一体化,同时具有螺旋桨的推进能力及舵的操纵性能,因而船舶的操纵灵活性有了极大提高。由于螺旋桨能够绕垂直于水平面方向的轴线做360°的旋转,因此可提供任意航向角度上的最大推力,船舶的操纵性特别灵敏,可实现进车、倒车、横向移动、急停和原地转动。全回转推进系统特别适合需要几乎原地转向的特种工程船。
全回转推进系统主要由驱动动力机、轴系和舵桨推进器构成,根据驱动动力方式的不同,分为船用发动机驱动、电力驱动及液压驱动。全回转推进系统典型架构如图3所示。
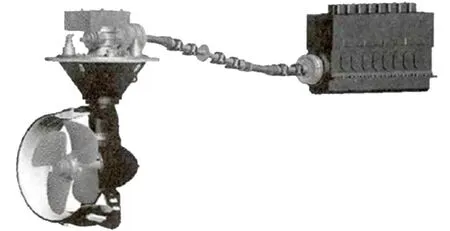
图3 全回转推进系统
2.4 全回转可调螺距舵桨推进系统
全回转可调螺距舵桨(以下简称全回转可调桨)推进系统的推进器一般由上齿轮箱、井箱、中立轴、下齿轮箱、螺旋桨、导流管、舵角反馈装置、液压系统等组成。可变螺距螺旋桨包括桨叶、桨榖和调距机构。导流管用于包覆舵桨装置的螺旋桨,可以增强螺旋桨的水动力性能,提高效率。全回转可调螺距舵桨推进系统典型构成如图4所示[2]。
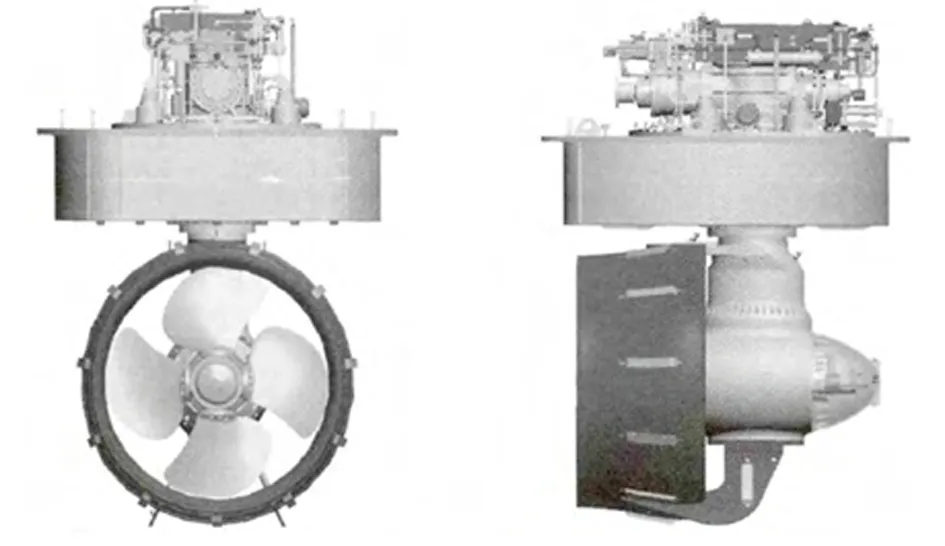
图4 全回转可调螺距舵桨推进系统
全回转可调螺距舵桨推进系统结合了全回转和可调桨两种推进方式的优点,其缺点是价格远远高于上述两者,结构极其复杂,维修保养需要较高的技能,后续使用费用昂贵,目前实用案例较少。
2.5 电力推进系统
船舶电力推进系统主要由发电模块、配电模块、推进模块、推进器模块、能量控制管理模块(Power Management System,PMS)等构成,其主要特点[3]:
(1) 电机在各种正、反转速下都能提供恒定转矩,推进系统可得到最佳工况特性,同时操纵控制简单,起动加速性能、制动性能、正反转切换性能以及船舶的操纵性能优良。
(2) 可根据用电设备的总需求功率确定在网发电机数量,因而发电机都能工作在理想负荷状态,提高原动机的燃烧效率,减少机器的尾气排放,推进系统更加绿色环保。
(3) 与机械轴系直接连接推进相比,电力推进有发动机—发电机能量转换环节,因而比机械推进效率更低,尤其是采用中小功率推进常用的交-直-交变频调速,中间经历两次电能转换,效率会更低。
(4) 发电机可安装于整体弹性座上,以额定状态运行,与机械轴系及船体结构无连接,极大地降低了振动和噪声,非常有利于控制船舶的噪声和振动。
(5) 电力推进比常规机械推进初始投资成本更高,导致船舶建造成本高25%左右。
(6) 无需传统推进系统的机械轴系,仅需要动力和控制电缆连接,机电设备布置的灵活性大幅提高。
(7) 电力推进含有较多的电气、电力电子设备以及自动控制系统等,对船舶设计人员及船电维修技术人员的技能要求更高。
船舶电力推进系统的主要类型有推进电机通过轴系驱动螺旋桨的形式和吊舱式电力推进系统(Electric Propulsion System,以下简称POD)。POD系统费用很高,需要一定的安装空间,小型船舶船体较小,不适宜安装吊舱推进系统。未来电力推进还可与LNG燃气发电机结合使用,进一步提高其环保经济性。此外,带超级电容或高效能锂电单元的混合电力推进系统可通过储能单元回收多余电能的方式进一步提高船舶节能率,同时解决电站供给功率与推进功率提升的时间差问题,可进一步提高船舶中央电网供电的可靠性和稳定性,也是船舶电力推进系统的发展方向之一。
2.6 小型航海保障工作船主推进系统分析
可调桨、全回转系统的操纵机构复杂,安装、保养及修理需要专业人员,且费用远高于定距桨系统。全回转可调桨推进系统结合了两者的优点,但系统的复杂性、价格高的缺点更加明显,目前还鲜有使用的例子。系统复杂必然带来可靠性较差,并且可调桨由于桨毂较大,桨叶根部容易产生空泡,效率较定距桨低3%~4%,全回转系统机械传动结构复杂,效率也低于定距桨。
3 小型航海保障工作船定位系统分析
海洋作业船舶的定位系统主要有锚泊定位、动力定位(Dynamic Positioning,DP)、锚泊+动力定位等3种主流形式。
3.1 锚泊定位
一般船舶上都必备锚泊定位系统,设置多个抛锚装置,通过多点抛锚的方法控制船舶在水上的位置。这种定位方法的突出特点是设备结构简单、工作可靠性高,应用经济性好,常用于浅水区域作业。水深的增加会导致锚的抓底力减小,而且抛锚作业也越发困难,锚链长度、强度和重量也要同步增加,水上的布链作业也会变得愈加复杂,导致锚泊定位系统布置困难,造价增加较大。
3.2 DP系统
DP系统的基本工作原理是系统的中央处理器将船舶的预估位置、船首方向等与设定点进行对比分析,通过预设的控制策略,给推进器发出指令,推进器推动船舶调整位置,保持船舶在设定点上的动态稳定。DP系统具备自动采集风、浪、流和其他环境因素数据并进行补偿的能力,定位精度高、不破坏海床结构、不受水深影响、成本不随水深增加而提高,特别适用于海洋工程作业领域。国际海事组织(International Maritime Organization,IMO)和各大船级社都对DP系统提出相应规范要求[4-8],主要考虑可靠性和冗余度设计将DP系统分为3个等级:DP1为单故障下可能发生定位失常;DP2为有源组件或发电机、推进器、配电盘、遥控阀门等单故障时不会发生定位失常,但电缆、管道、手控阀等静态元件发生故障时可能会发生定位失常; DP3为任何单故障都不会导致定位失常。
3.3 锚泊+动力定位
在1 500 m左右的水深范围内锚泊辅助动力定位效果较为理想,锚泊辅助动力定位结合锚泊定位和动力定位的优点,是较为理想的海上固定作业结构物的定位方式。
3.4 小型航海保障工作船定位系统分析
根据航海保障工作船的作业特点,DP系统不需要船舶首向要求,因而可较大地降低动力系统的功率配置要求,节省初期投资和后期维护费用,DP系统更适合与电力推进系统配合使用,主电力推进装置可兼作DP系统的推力器[9]。此外,侧向推进装置和襟翼舵也是提高船舶低速下操纵性和定位能力的有效途径。
4 结 语
基于小型航海保障工作船主推进和定位功能的需求分析,梳理对比目前主流船舶推进系统和定位系统的特点,确定新型航保船的首制船采用常规定距桨推进及锚泊定位的高性价比方案,符合该型船配备于基层航标管理单位的定位,实现低造价、实用性强、突出的性价比、能广泛推广的研制目标,可作为海事系统的基础标准船型。同时通过对多种推进和定位模式的分析,为今后通过模块化优化设计,选择不同类型的主推进和定位形式,形成系列化船型构建了技术基础。航海保障单位可根据自身需求通过不同的模块搭配进行选择性建造,在以航标作业为主的基础上派生出多用途船型,延长基础船型的技术寿命,形成更大的社会和经济效益,符合当今船舶设计的发展趋势。
[ 1 ] 郁玉峰,梅斌贤,徐高峰,等.大功率海工可调螺距全回转推进系统[J]. 中外船舶科技,2015(4):20-23.
[ 2 ] 李明.船舶调距桨推进装置的数学建模与仿真研究[D].大连:大连海事大学,2009.
[ 3 ] 于全虎.长江车客渡船全电力推进关键技术研究[J].江苏船舶,2016,33(4):1-5.
[ 4 ] 吴德烽,杨国豪.船舶动力定位关键技术研究综述[J].舰船科学技术,2014,36(7):1-6.
[ 5 ] 郑荣才,宋健力,黎琼,等.船舶动力定位系统[J].中国惯性技术学报,2013,21(4):495-499.
[ 6 ] 仲伟东,王飞跃,羊卫.动力定位船总布置设计方法研究[J].船舶,2015(2):37-41.
[ 7 ] 姜玉林. 动力系统在船舶电力推进动力定位中的应用探讨[J].航海,2014(5):63-65.
[ 8 ] 于全虎,刘锡华,常致.内河小型航标船关键技术的研究[J].江苏船舶,2015(5):1-3.
[ 9 ] 中国船级社.国内航行海船建造规范[M].北京:人民交通出版社,2012.
[10] 中国船级社.钢质海船入级规范[M].北京:人民交通出版社,2015.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
珠江水运(2021年20期)2021-12-09
中国水运(2019年2期)2019-02-21
舰船科学技术(2018年8期)2018-09-02
中国建筑金属结构(2018年4期)2018-05-23
制造技术与机床(2017年10期)2017-11-28
中国卫生标准管理(2015年4期)2016-01-14
江苏船舶(2015年1期)2015-05-06
舰船科学技术(2015年10期)2015-03-12
船海工程(2012年4期)2012-01-22