半挂牵引车制动主挂协调性计算分析与优化
2018-05-14 01:05张军陈宇超杨长伟郭冬妮马明武
汽车零部件 2018年1期
张军,陈宇超,杨长伟,郭冬妮,马明武
(中国第一汽车股份有限公司技术中心,吉林长春 130011)
0 引言
重型半挂车的牵引车和挂车之间存在复杂的耦合关系,具有后部放大的特点,导致行驶过程中极易发生侧翻、蛇形摆振和折叠等危险事故。所以制动主挂协调性对汽车列车制动安全性影响巨大,是汽车安全的重要保证,汽车列车制动时一旦出现失稳或者制动力不足会造成重大事故。国内卡车普遍存在空载时制动主挂协调性差的问题,这是由于半挂牵引车和半挂车分别由不同的生产厂家制造,形成汽车列车后,这就存在制动时序和制动强度的匹配问题。而且由于挂车的生产厂家众多,用户选择挂车存在很大地域性和随机性,因此很难控制挂车制动性能。某重卡道路试验中发现空载时制动主挂协调性差的问题,存在挂车推主车的现象。这是由于大部分半挂牵引车缺乏感载阀等空满载制动压力调节装置,导致空载时,很小的制动踏板行程会产生很大的制动强度,主挂协调性曲线不满足法规要求,空载时半挂牵引车制动强度偏大。
1 制动主挂协调性差问题
制动响应时间和制动力分配是汽车列车制动性能的重要指标,分别影响半挂牵引车的制动时序的好坏和制动强度的大小。只有当汽车列车在制动延迟时间和相应制动压力非常接近的情况下,才能保持良好的平衡,否则,制动力会根据各桥载荷不同产生差异。
半挂牵引车前轮距离挂车后轮大约12 m,中间制动管路气压建立和传输需要一定的时间,同时经过挂车阀、挂车紧急继动阀、挂车ABS等阀总成,也有一定的延迟,一般通过挂车阀的越前量和紧急继动阀的比例输出能解决主挂车的响应时间差。但是由于挂车的随机性,不同厂家挂车的制动性能差异较大,因此文中仅针对半挂牵引车的主挂协调性进行研究。
1.1 问题描述
某半挂牵引车按照GB12676-2014《商用车辆和挂车制动系统技术要求及试验方法》进行制动性能试验时发现空载时主挂协调性曲线偏出法规曲线范围,如图1所示。
由图1可以看出:满载满足法规要求,而空载时很小的制动气压就会导致整车很高的制动强度,主挂协调性曲线超出法规范围,主观评价存在挂车推主车的现象。

图1 某半挂牵引车制动主挂协调性曲线
1.2 问题分析
从制动时序和制动强度的匹配两个方面来分析主挂车制动协调性差的原因。
1.2.1 制动时序分析
按GB12676-2014进行半挂牵引车制动响应时间试验,结果如图2所示。

图2 半挂牵引车制动响应时间
GB12676-2014对挂车控制管路压力响应时间有明确的要求,如表1所示。试验结果表明半挂牵引车满足制动时序要求。

表1 挂车控制管路压力响应时间
1.2.2 制动强度分析
半挂牵引车受力示意图如图3所示。通常将6×4车型也等效为4×2分析。
根据GB12676-2014,对于空载汽车列车,半挂车施于牵引车的动载荷可用一个等于鞍座最大承载力15%的静止力作用于牵引销上代替。

图3 半挂牵引车受力分析示意图
Ps=15%Pmax
(1)
式中:Pmax为半挂牵引车鞍座最大承载力(N)。
对于满载汽车列车,半挂车施于牵引车的动载荷可用一个作用在牵引销座上的静止力Ps代替,Ps由下式计算:
Ps=Ps0(1+0.45×z)
(2)
式中:Ps0为牵引车满载时最大总重力与空载时最大总重力之差(N)。
等效质心高度h由下式计算:
(3)
式中:h0为牵引车的重心高度(m);hs为鞍座高度(m);P0为牵引车单车空载重力(N)。
P=P0+Ps
(4)
式中:P为半挂牵引车总重力(N)。
根据半挂牵引车受力分析情况,等效前轴载荷Pfs由下式计算:
(5)
式中:Pf为半挂牵引车前轴静态载荷(N)。
考虑制动强度为z时的轴荷转移,前轴附着力矩Mf由下式计算:
Mf=(Pfs+P×z×h/L)×φ×R×g
(6)
式中:L为半挂牵引车整车轴距(m);φ为路面附着系数,一般取0.7;R为轮胎滚动半径(m)。
后桥附着力矩Mr由下式计算:
Mr=(P-Pfs-P×z×h/L)×φ×R×g
(7)
对于装配鼓式制动器的半挂牵引车,前轴制动力矩M1由下式计算:
M1=2×Bef1×p1×A1×l1×η1
(8)
式中:Bef1为前轴制动器制动效能因数;p1为半挂牵引车前轴制动气室压力(kPa);A1为半挂牵引车前轴制动气室有效面积(m2);l1为前轴制动调整臂长度(m);η1为前轴制动器效率。
后桥制动力矩M2由下式计算:
M2=2×Bef2×p2×A2×l2×η2
(9)
式中:Bef2为后桥制动器制动效能因数;p2为半挂牵引车后桥制动气室压力(kPa);A2为半挂牵引车后桥制动气室有效面积(m2);l2为后桥制动调整臂长度(m);η2为后桥制动器效率。
其中Bef1、Bef2、A1、A2、l1、l2、η1、η2均由制动器本身结构决定,Bef1、Bef2的计算方法在文献[1]中有详细的说明;η1、η2由多次试验确定,一般取0.75~0.85;p1、p2一般由制动阀和继动阀的输出气压确定,且存在压差关系,这里取p2=p1+50。
挂车阀控制管路压力是由制动阀21口的输出压力与挂车阀曲线决定的,即挂车阀的越前量。某重卡挂车制动控制管路接头处压力p4由下式计算:
p4=1.06×p2+20
(10)
根据GB12676-2014,整车制动强度z可由下式计算:
z=Tm/Pm=[(M1+M2)/R]/P
(11)
考虑前轴或后桥抱死情况,前轴和后桥的附着力矩分别等于它们的制动力矩时,可计算前轴和后桥的抱死气压pf、pr,分别由下式计算:
pf=Mf/(2×Bef1×A1×l1×η1)
(12)
pr=Mr/(2×Bef2×A2×l2×η2)
(13)
前轴先抱死时制动强度zf为
zf=Tm/Pm=[(Mf+M2)/R]/P
(14)
后桥先抱死时制动强度zr为
zr=Tm/Pm=[(M1+Mr)/R]/P
(15)
前轴和后桥都抱死时制动强度zm为
zm=Tm/Pm=[(Mf+Mr)/R]/P
(16)
根据以上公式,可得制动强度z与挂车制动管接头处压力p4分别在z≤min (zf,zr)、min (zf,zr)≤z≤zm、zm≤z三种情况时的关系,从而可以得到制动强度z与挂车制动管接头处压力p4曲线,即主挂制动协调性曲线。
某重卡主挂制动协调性理论计算及道路试验曲线如图4所示。可以看出:满载时,曲线满足法规要求;空载时,曲线超出了法规规定的范围。

图4 某重卡主挂制动协调性曲线
2 主挂制动协调性优化
经以上计算分析结合道路试验数据可知:某重卡空载时主挂制动协调性差是由于整车空、满载制动强度匹配不能调节引起的。设计半挂牵引车制动力分配时通常按照满载计算整车制动性能,在没有空、满载调节装置的半挂牵引车上,空载几乎不可能满足要求。 因此,改善空载时主挂制动协调性可考虑在前制动回路增加适配阀和后制动回路采用感载阀两种方案。
2.1 前制动回路增加适配阀方案
如图5所示,在制动阀22口到前轴ABS之间增加适配阀(原理图中元件23),减小空、满载小行程制动时前制动回路输出压力,从而减小整车制动力矩,减少挂车对牵引车的冲击,提高空载时牵引车与挂车的同步性。适配阀静特性曲线如图6所示。
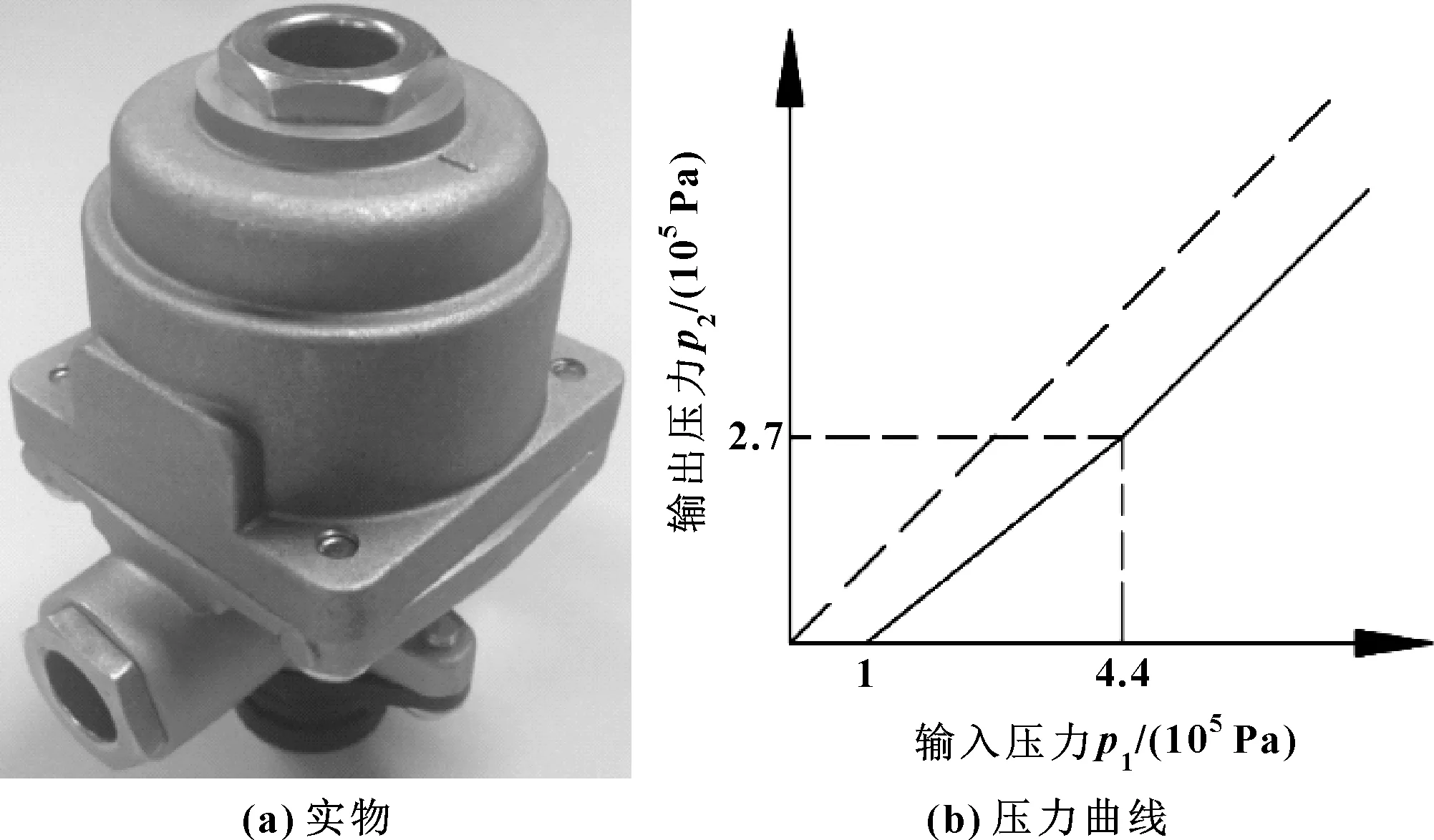
图6 适配阀及静特性曲线
如图7所示,前制动回路增加适配阀方案主挂制动协调性理论计算曲线满足法规要求。此时,空、满载小行程制动时制动强度降低,但整车制动减速度和制动距离均满足法规要求。

图7 适配阀方案主挂制动协调性理论计算曲线
2.2 后制动回路采用感载阀方案
如图8所示,将后桥继动阀改为气压式感载阀(原理图中元件10,实物见图9),空载时减小制动时后制动回路输出压力,从而减小整车制动力矩,减少挂车对牵引车的冲击,提高空载时牵引车与挂车的同步性。感载阀静特性曲线如图10所示。其中p41=p42=4.9×105Pa为满载制动时曲线;p41=p42=0.6×105Pa为空载制动时曲线;p41=p42=0为失效制动时曲线。

图8 后制动回路采用感载阀方案原理图

图9 气压式感载阀
如图11所示,后制动回路采用感载阀方案主挂制动协调性曲线满足法规要求。满载制动时曲线与原后桥继动阀时相同;空载制动时制动强度降低,但整车制动减速度和制动距离均满足法规要求。
两种方案的主挂制动协调性曲线,空、满载均满足法规要求,达到设计要求。感载阀方案的效果明显更好一些,但是成本稍高一些。

图11 感载阀方案主挂制动协调性理论计算曲线
3 结束语
针对半挂牵引车空载时主挂制动协调性差、主挂协调性曲线超出了法规要求范围的问题,通过对问题产生的原因进行理论计算与分析,结合道路试验及主观评价,提出了两种优化方案。通过采用可改变输出压力的装置,改善了牵引车空载主挂制动协调性,为半挂牵引车制动系统设计提供了依据。
参考文献:
[1]余志生等.汽车理论[M].北京:机械工业出版社,2006.
[2]于俊峰,李广庭,刘明杰,等.半挂牵引列车制动协调性探讨[J].重型汽车,2013(4):12-15.
[3]全国汽车标准化技术委员会.商用车辆和挂车制动系统技术要求及试验方法:GB 12676-2014[S].北京:中国标准出版社,2015.
猜你喜欢
商用汽车(2022年7期)2022-10-11
新视线·建筑与电力(2021年2期)2021-09-10
教育·校长参考(2021年5期)2021-07-08
北京汽车(2021年2期)2021-05-07
直升机技术(2020年2期)2020-06-16
兵器装备工程学报(2020年1期)2020-03-05
专用汽车(2018年10期)2018-11-02
山东青年(2016年12期)2017-03-02
时代金融(2016年23期)2016-10-31
中学生数理化·八年级物理人教版(2014年2期)2014-04-02