自适应尾灯关键技术研究
2018-07-04 07:25李祥兵
汽车电器 2018年6期
李祥兵
(神龙汽车有限公司,湖北 武汉 430050)
LED的许多优势使其在汽车尾灯开发中得到广泛应用,例如反应速度快(<1 ms)、安全性能高、使用寿命长(大于车辆使用年限)、更高的照明系统可靠性、低功率、体积小、可减小车辆尾灯的体积、可实现自由光学设计等。车辆的尾部信号系统包括转向灯、倒车灯、制动灯、高位制动灯、后雾灯等多种信号灯,它们在车辆行驶时提供了非常重要的有关驾驶行为的信息。为了增加汽车在道路上行驶的安全性,无论是在白天还是夜晚,尾灯的功能信号都应该被清楚地识别,并且要避免产生眩目。许多研究表明尾灯在近距离时更加容易产生眩光,比如在车辆等待红灯时或者道路拥堵时,因此对自适应尾灯如何进行光照强度调节的研究具有重大意义。
本文研究的对象为LED自适应尾灯。查阅欧标法规,能够找到关于尾灯允许的发光强度范围的信息,但无法了解到尾灯与其他信号灯应如何关联,同样也无法找到关于其他因素对尾灯产生影响的规定,比如前面提到的距离对尾灯眩光的影响。而目前对自适应尾灯研究的基本方向是通过传感器测量当前的能见度条件,调节尾灯信号功能的强度。本文基于目前现有的技术和法规,对自适应尾灯进行初步探讨。
1 自适应尾灯的法规差异
关于自适应尾灯,目前存在欧标和国标两种不同的法规状态。根据即将颁布的国标GB4785—XXXX,其中4.9.2章节关于自适应车灯的法规描述如下。车灯光学特性(照度)允许变化的情况:①随外界环境光变化;②随其他灯具开启而进行的变化;③当灯具切换为另一个功能。即所有上述光学特性变化应符合灯具相关的技术规定。
GB4785—XXXX 4.26中对后转向灯、后位灯、制动灯(除S4制动灯)以及后雾灯允许可变光强。上述可变光强控制可对下列至少一种外界影响同时产生反应:环境照明、雾、降雪、降雨、喷雾、沙尘、透光面污染,且应保证其光强关系在变化过渡期间维持不变。在过渡期间不应出现可察觉的强烈变化。S4类制动灯可以独立于其他灯具产生光强变化。驾驶员应可将上述灯具的光强调至其稳定光强状态,也可将其恢复到自动可变状态。这些条款的描述与ECE R48-06§5.26 & 5.9.2基本一致。但是两者还是存在一些差异,主要是GB4785—XXXX目前仍然处于修订阶段,何时颁布未知。这就导致了后续在自适应尾灯的照度方案,还有可能因中国客户实际需求的变化而出现技术演变导致存在差异。另外,欧洲ECE对自适应尾灯的要求更加明确,规定了尾灯各个功能在点亮状态的实际照度范围要求。图1为自适应尾灯的法规差异。
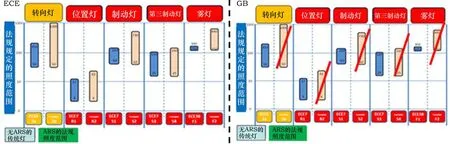
图1 自适应尾灯的法规差异
根据ECE的最新要求,车灯的信号功能,比如后转向灯、制动灯、位置灯和雾灯等,其亮度能随着周围环境照度的变化而发生变化,并且对各个功能的亮度变化范围提供了参照值。开发出这种自适应尾灯,需要采用新的传感器来与之匹配。这种自适应尾灯的好处在于能够为其他道路使用者在不同的天气条件下提供更好的信号指示,防止眩目(信号功能照度太大)和无法分清(信号功能照度太弱)的问题。
2 自适应尾灯的控制策略
2.1 自适应前照灯和自适应尾灯的差异
自适应前照灯(AFS)与自适应尾灯(ARS)的控制策略有明显的差异。前者主要是要求前照灯光在车身各种姿态下能进行调整,以便提供适应城市道路、乡村路面、高速路面、交叉路口、弯道等路况下的照明,同时避免给对方来车驾驶员造成眩目,引起交通事故。自适应前照灯控制策略的输入来自转向盘转角、车速传感器以及车身前后高度传感器,通过步进电机实现水平和垂直方向的灯光调节,使得驾驶员具有更好的视角范围。
而自适应尾灯主要与环境照度有关,它需要对自身的亮度进行优化,以便其他道路使用者能更加清晰地看到该车的工作状态。自适应前照灯和自适应尾灯的功能相似点在于都是为了防止给其他道路使用者产生眩目,减少交通事故。
2.2 自适应尾灯的控制原理
通常而言,基础型自适应尾灯的原理框图如图2所示。
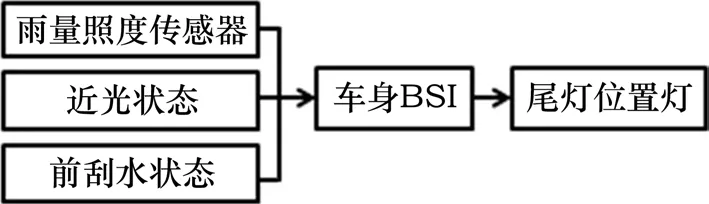
图2 位置灯的自适应照明控制模块
雨量照度传感器是自适应尾灯的重要部件,主要感知黎明、黄昏、桥梁和隧道、树林等情况下的环境照度,这些信息一般是处于白天状态的信息。而近光开启一般发生在晚上,近光的开启一般伴随着位置灯的开启。因此近光的状态除了提示BSI系统处于夜间工作模式,同时也是为了开启位置灯。前刮水的状态主要有两层含义:开启或关闭状态,刮水挡位状态。开启或关闭状态信息主要提醒BSI车辆是否处于雨雪天气。而挡位状态主要是提供雨量大小的信息,BSI根据这些信息来判断是否需要将尾灯亮度调高或调低,以便让其他道路使用者能更清楚地识别该车的运行状态。
雨量照度传感器(图3)的功能之一就是感知亮度。在目前的传感器中,照度感知一般基于2个方向:垂直向上的照度感知和水平向前的照度感知。前者主要用来判断天空的照度情况,继而来判断是白天还是黑夜时刻。水平向前的照度感知主要用来感知车辆周围的环境照度(以向前方向为例),该环境照度也将作为系统BSI输入和计算的重要基础。

图3 雨量照度传感器
为保证自适应尾灯能根据环境照度来实现亮度调节,在照度的阈值定义方面,一般会将照度分为4个等级:非常亮的白天、中间状态(激活状态的门槛值)、一般亮度的白天和一般亮度的夜间。如果自适应尾灯的控制信号由车身给定,则这些信号将通过车身控制器处理后直接给尾灯供电。
对于更为先进的自适应尾灯系统,在自适应尾灯激活后的整个过程中,除了根据环境照度、驾驶状态和前刮水状态来设定特定的尾灯亮度外,还会根据道路车辆的周围环境来进行识别,比如车辆离后方跟随车辆很远时、后方车辆逐渐靠近时、离后方跟随车辆很近时或者后方车辆逐渐超车并远离时。这4种状态时后方驾驶员通常所处的4种状态,是一种快速动态且较为复杂的信息,都需要在先进自适应尾灯上加以考虑。
3 自适应尾灯照度范围定义
除了上述技术上的要求,自适应尾灯最重要的是对视觉能见度进行定义,以便既能让道路使用者能很清晰地看到前方车辆的工作状态,同时又不会因眩目而产生不舒适感,导致驾驶疲劳或交通事故。目前的研究缺乏统一有效的评价能见度的光学标准,因此在照度范围方面的研究一直存在难度。本文通过模拟试验,进行了试验研究。
3.1 试验描述
在如图4所示室外试车跑道上静止的两车相距一定的距离,后面车辆中的被试对前面车辆尾灯的光强进行1~9分的评价。试验设置了2个变量:一是前车尾灯的光强,总共设置了5种光强(最大光强173 cd的3%,11%,28%,57%和100%);二是两车的距离,共设置了4种距离(5 m,20 m,50 m,100 m)。
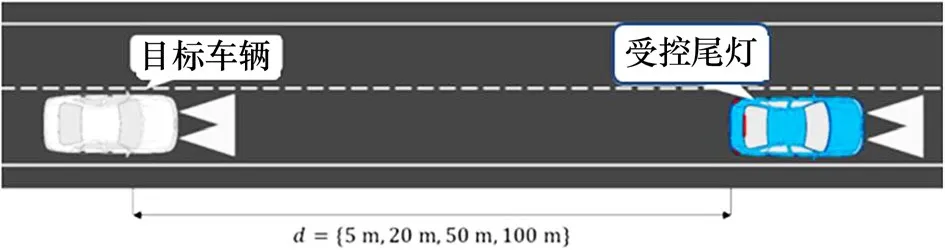
图4 测试中车辆的相对位置
该试验在室外进行,以便能完全模拟真实的驾驶环境。该试验将可能影响尾灯亮度的因素降低到最低。 在模拟过程中,道路上没有其他道路使用者(行人或其他车辆),每条道路的宽度大约为3.75 m. 该试验主要采用静态评价的方式,2台车之间保持一定的距离,车内有驾驶员。
为了调节尾灯的亮度,开发了2个电控单元。其核心控制部分在图5中有描述。图5中前一个单元安装在车辆的前部,通过提供占空比信号给尾灯供电。通过无线电模块接收到占空比信号后,对尾灯的亮度进行调节。第2个模块放置在车内用于测试。这个模块包含2个部分,分别连接计算机和无线电发射器。整个测试由操作员通过软件设置来完成,该软件主要用于产生占空比,并通过无线电模块发送给其他车辆。采用输入装置,将尾灯的亮度进行调节。系统所有的数据(包括驾驶员的数据、2台车辆之间的距离以及占空比)都通过软件来设置和保存。
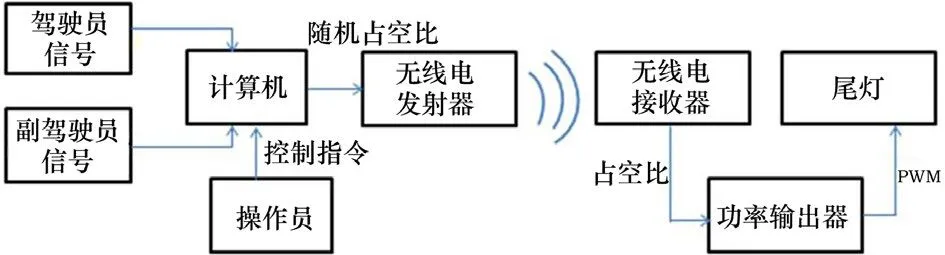
图5 试验设备原理框图
3.2 测试流程
在测试过程中,2台车的近光均打开,以便模拟在夜间驾驶的环境状态。主驾驶员和副驾驶员同时进行测试和观察。在试验中,2个驾驶员都需要观察前方的尾灯,其中主驾驶员观察左尾灯,副驾驶员观察右尾灯。
整个过程需要完成车距为5 m、20 m、50 m和100 m的测试。在每个测试车距里,需要测试5个照度水平:最大照度(173cd)的3%、11%、28%、57%以及100%。每个照度都要随机测试3次。5 s后制动灯会自动关闭,然后测试人员采用9个等级的打分方法给制动灯打分。表1展示了9个等级的打分方法。

表1 9个等级的打分方法
3.3 测试结果
1)测试对象 总共有22个测试人员参加了持续11天的评价试验,其中男性5人,9人戴眼镜。图6展示了测试对象的年龄分布。在每个测试开始之前,所有测试人员都知晓如何判断亮度以及如何操纵设备。
2)关于照度的相关性 评价比值由照度和相对应的距离相比较得到。图7是基于照度的曲线。很显然,高位制动灯亮度不仅跟照度有关,也跟距离有关。
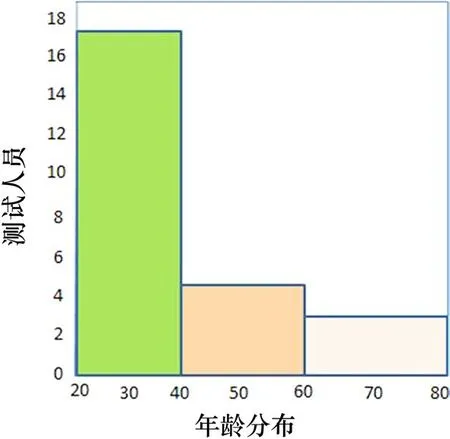
图6 试验对象的年龄分布
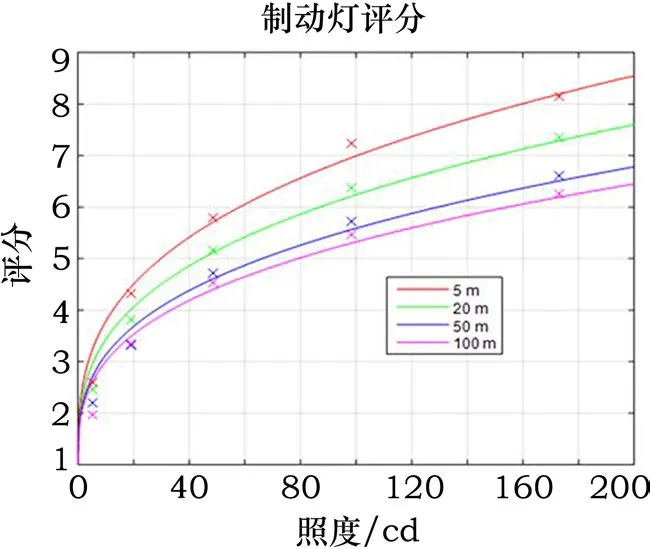
图7 制动灯亮度与照度的关系
3)与距离的相关性 评分量表中5分表示最理想的光强,4分和6分表示较理想的光强。图8中显示不同距离下,观测尾灯在最理想光强范围内时实际尾灯光强和车辆距离的关系。欧标法规规定的最小光强值是60 cd,从图8中可以看到,特别是在车辆距离较小时,理想的尾灯光强是在60 cd的范围内,而这是欧标UNECE所允许的最小值。
对于自适应尾灯而言,希望相关的因素都能够通过试验模拟,并且这些因素对其他的道路使用者的影响是一致的,比如在亮度、可视角度、道路状况、交通密度、驾驶环境等发生变化的情况。通过照度来衡量尾灯所有功能的亮度状态是一种很有效的手段,因为在亮度方面的增加将直接被观察者感知为距离的缩短。人类通过空间感知的规律将对照度与距离之间的关系确定提供理论保证。为了确保对尾灯更好的感知,下一步也将着手研究太阳光对驾驶员的感知的影响。
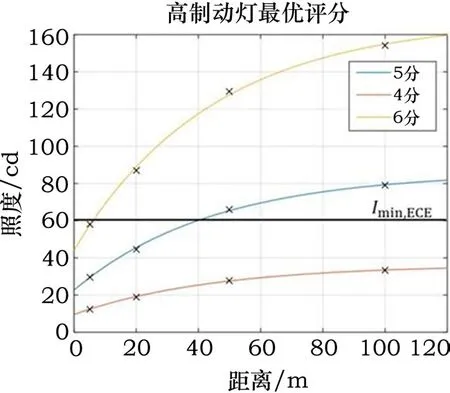
图8 亮度与距离之间的关联
4 结论与展望
由上述结果可以得出结论:根据环境条件进行自动调节的自适应尾灯系统非常有必要。在车距较小时,比如红灯或堵车的情况下,尾灯的发光强度可以减小至法规允许的最小发光强度60cd,这样既保证了道路中车辆行驶的安全性,能使后方车辆清晰地识别尾灯的信号;同时保证了后方车辆驾驶员的视觉舒适度,不会产生眩光影响正常驾驶。另外,由于光强的降低,能耗也可以相应地减小,计算可得降低光强可降低约66%的能耗。由此可见此项研究的意义和重要性。在进一步的研究中,将在两车都运动时对光强进行更准确的评价,并且结合实际天气、道路状况进行综合考虑。由于自适应尾灯需要确保信号的准确传递,而光强的增加一般被认为是距离的减少,因此,考虑改变光强传递制动等尾灯的功能信号是一种高效传递信号的方式,具有非常深远的实际应用价值。
如梅赛德斯奔驰全新E级所搭载的全新尾灯,不仅造型更为动感,在实用性方面也做出了革命性的提升。全新设计的尾灯能够根据环境不同自行调节亮度。正常状态下,尾灯亮度可达100%,而车辆在夜间行驶时可将亮度弱化至80%,若在昏暗环境下开启尾灯,其亮度最低可削弱至60%。
[1] 李礼夫,邓前.汽车自适应前照灯的夜间转弯特性研究[J].照明工程学报,2010(4):32-36,44.
[2] GB/T30036—2013,汽车用自适应前照灯系统[S].
猜你喜欢
航天返回与遥感(2022年4期)2022-09-03
金山(2022年2期)2022-03-15
汽车零部件(2021年9期)2021-09-29
科学与生活(2021年14期)2021-09-10
家庭影院技术(2021年6期)2021-07-28
汽车电器(2020年4期)2020-04-23
电脑知识与技术·经验技巧(2018年2期)2018-05-21
小天使·六年级语数英综合(2017年5期)2017-05-27
青春(2017年1期)2017-02-09