
智能汽车的激光雷达标定
2018-10-21 21:13郭小兰
科学导报·学术 2018年13期
关键词:激光雷达
郭小兰
摘要:智能汽车就是在普通车辆的基础上增加先进的传感器,比如雷达、控制器、执行器等装置,通过车载传感系统和信息终端实现与人、车、路等的智能信息交换使汽车具备智能的环境感知能力。本文概述了激光雷达外部安装参数的标定以及单个激光雷达数据的数据转换,为激光雷达标定的进一步研究提供参考。
关键词:智能汽车,激光雷达,参數标定
【中图分类号】G718.5
【文献标识码】B
【文章编号】2236-1879(2018)13-0185-01
激光雷达与车体为刚性连接,两者间的相对姿态和位移固定不变。为了建立各个激光雷达之间的相对坐标关系。需要对激光雷达的安装进行简单的标定,并将激光雷达数据从激光雷达坐标系统转换至车体坐标系上。
1.激光雷达外部安装参数的标定
激光雷达外部安装参数的标定通常采用等腰直角三角标定板和正方形标定板来完成。需要标定的激光雷达的安装参数为激光雷达的俯仰角与侧倾角。
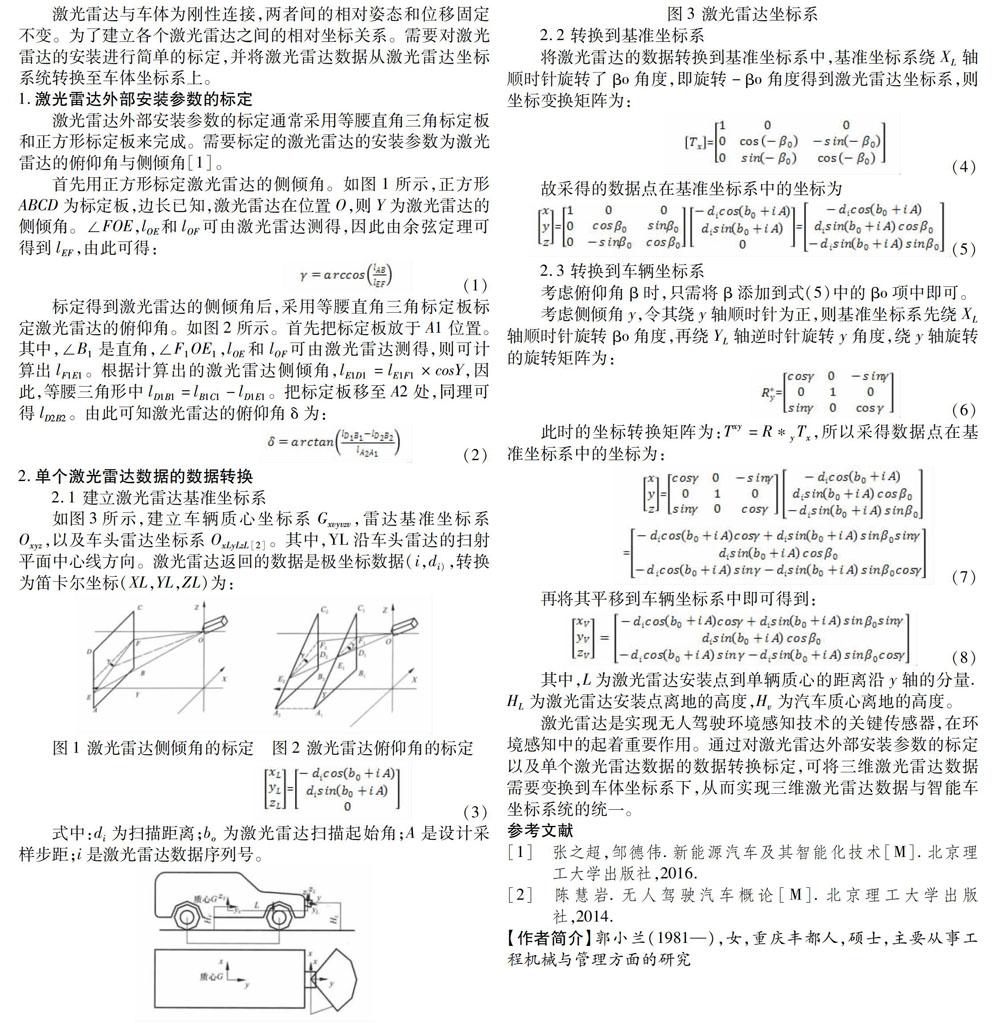
首先用正方形标定激光雷达的侧倾角。如图1所示,正方形ABCD为标定板,边长已知,激光雷达在位置O,则Y为激光雷达的侧倾角。∠FOE,LOE和LOF可由激光雷达测得,因此由余弦定理可得到∠EF,由此可得:
标定得到激光雷达的侧倾角后,采用等腰直角三角标定板标定激光雷达的俯仰角。如图2所示。首先把标定板放于Al位置。其中,∠B1是直角,∠F1OE1,LOE和LOF可由激光雷达测得,则可计算出∠FlEl。根据计算出的激光雷达侧倾角,∠RD1=LEIF1×cosy,因此,等腰三角形中∠DIBl=∠BICl-∠DIE1。把标定板移至42处,同理可得LD282。由此可知激光雷达的俯仰角δ为:
2.单个激光雷达数据的数据转换
2.1建立激光雷达基准坐标系
如图3所示,建立车辆质心坐标系Gxvyvzv,雷达基准坐标系,以及车头雷达坐标系O。其中,YL沿车头雷达的扫射平面中心线方向。激光雷达返回的数据是极坐标数据(i,d、转换为笛卡尔坐标(X,YL,ZL)为:
图1激光雷达侧倾角的标定图2激光雷达俯仰角的标定
式中:di为扫描距离;bn为激光雷达扫描起始角;A是设计采样步距;i是激光雷达数据序列号。
2.2转换到基准坐标系
将激光雷达的数据转换到基准坐标系中,基准坐标系绕X轴顺时针旋转了Bo角度,即旋转-Bo角度得到激光雷达坐标系,则坐标变换矩阵为:
故采得的数据点在基准坐标系中的坐标为
2.3转换到车辆坐标系
考虑俯仰角B时,只需将B添加到式(5)中的Bo项中即可。
考虑侧倾角y,令其绕y轴顺时针为正,则基准坐标系先绕XL轴顺时针旋转Bo角度,再绕YL轴逆时针旋转y角度,绕y轴旋转的旋转矩阵为:
此时的坐标转换矩阵为:TWY=R*YTx,所以采得数据点在基准坐标系中的坐标为:
再将其平移到车辆坐标系中即可得到:
其中,L为激光雷达安装点到单辆质心的距离沿y轴的分量.HL为激光雷达安装点离地的高度,Hn为汽车质心离地的高度。
激光雷达是实现无人驾驶环境感知技术的关键传感器,在环境感知中的起着重要作用。通过对激光雷达外部安装参数的标定以及单个激光雷达数据的数据转换标定,可将三维激光雷达数据需要变换到车体坐标系下,从而实现三维激光雷达数据与智能车坐标系统的统一。
参考文献
[1]张之超,邹德伟.新能源汽车及其智能化技术[M].北京理工大学出版社,2016.
[2]陈慧岩.无人驾驶汽车概论[M].北京理工大学出版社,2014.
猜你喜欢
汽车观察(2022年6期)2022-07-03
股市动态分析(2022年1期)2022-01-12
计算机应用文摘·触控(2021年22期)2021-12-13
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
财经(2021年2期)2021-02-07
计算机与网络(2020年19期)2020-12-04
中国计算机报(2020年33期)2020-09-13
中国电子报(2020年3期)2020-03-26
汽车观察(2019年6期)2019-07-30
