基于RSSI的隧道人员定位系统
2018-11-29 09:39梁壮,李晖
筑路机械与施工机械化 2018年11期
梁 壮,李 晖
(沈阳工业大学 信息科学与工程学院,辽宁 沈阳 110870)
0 引 言
近年来,国家对交通基础设施的重视程度越来越高,公路和铁路的修建也开始延伸到地质情况复杂的山区,从而导致桥隧比例在逐渐变大,隧道项目的建设因此显得非常重要,交通行业内人员必须重视隧道建设及洞内的作业安全[1]。
孙迎春[2]从ZigBee的小成本、小功耗及高稳定性等优点出发,开发出以ZigBee技术为基础的井下人员定位系统。闫航[3]提出了基于ZigBee的隧道车辆定位系统,实现了车辆的追踪定位。徐婷等[4]提出基于物联网的隧道作业人员定位系统,提升了当前隧道工程建设过程中的信息管理水平。何金鑫等[5]为了解决矿井中通讯成本高的问题,开发了以Android和ZigBee为基础的井下作业人员定位系统。
本文采用ZigBee无线传感器和基于RSSI的隧道人员定位算法设计隧道人员定位系统,使其不仅能够对隧道内作业人员进行定位跟踪,而且隧道外的管理人员能实时了解隧道内施工人员的相关情况,这样既能保障生产人员的人身安全,又能加强当前隧道工程建设中的信息化管理。
1 系统总体方案设计
1.1 ZigBee技术
ZigBee属于无线传感器网络中的一种, 其数传模块与移动网络基站相似,是一种近距离、小功耗、高容量的无线通信技术,基于IEEE 802.15.4局域网协议,使用2.4 GHz波段[6-8]。在无线网络覆盖的地方,每个ZigBee网络节点可以互相通信,网络节点之间可以从标准的75 m无限扩展。ZigBee技术不仅能应用于近距离、小功耗、低传输速率的设备间的信息传播,还可用于周期性、间断性以及低响应时间的信息传送。
1.2 系统组成
基于RSSI(信号接收强度)的隧道人员定位系统是由前端定位层、中间传输层和后端用户层构成,其整体结构如图1所示[9]。隧道人员定位系统的定位层主要包括隧道内的定位节点、参考节点及协调器节点,主要作用是以协调器节点为核心组建ZigBee无线通信网络,在隧道中建立无线信号覆盖区域[10]。传输层主要是由交换机、无线网桥及网线等组成,它可以将定位层作业人员的相关信息远程传输到后端的监控中心。后端用户层可以根据用户要求对隧道内的人员位置及其他信息进行处理,当发生事故时,管理人员可以通过监控软件进行决策并发送相关指令,便于救援工作的顺利展开。

图1 ZigBee隧道人员定位系统
2 定位算法设计
2.1 定位算法的提出
为了提高隧道人员定位精度,本文采用基于RSSI值优化的加权质心算法实现隧道人员定位。
RSSI测距是通过测量发射端与接收端之间的功率损耗来获得不同节点之间的距离。发射端的发射功率是确定的,接收端可以在收到信号时测出接收功率,且能够求解出传输过程中的功率损耗,使用信号传播的数学模型可以将传输中的功率损耗转变为节点之间的距离。依据无线信号传输的数学模型(式1),可以求出节点间距d[11]。
(1)
式中:P(d)为发射端与接收端的距离为d时接收端获取的RSSI值;P(d0)为离发射端的距离为d0时接收端获取的RSSI值;n为路径损耗指数,n的值一般需要在实际环境中测得(巷道中n的取值为2.1~3.3);ξ为传播过程中的路径损耗随间距增大的速率,其均值是0。
发射端的发射功率是确定的,将发射端的功率代入式(1)中,且用-A表示P(d0),由于ξ是高斯随机变量,均值为0,故将ξ取0,因此式(1)可以写成
P(d)=-(A+10nlgd)
(2)
式中:d为接收端与发送端节点的距离。
由式(2)可以推出距离d的公式
(3)
由式(3)可知,若P(d)已知,则可求出d的值。
为了提高传统三边定位算法的精度,可从三方面入手:一是对RSSI值进行优化,二是引入质心算法,三是引入加权因子。
2.1.1 RSSI值优化
RSSI值不恒定产生的误差会随接收端离发射端距离的减小而降低。在定位系统中,定位节点可接收到m个参考节点发来的RSSI值,但由于复杂环境的影响,导致接收的RSSI值变化较大,从而对距离的计算产生了较大的误差。因此,在求解距离前,首先需要对RSSI值进行滤波。本文采用高斯模型对RSSI值实行滤波处理。在概率较大的发生区,选概率高于0.6的范围,然后再经过高斯滤波,可得到RSSI值在[0.15σ+μ,3.09σ+μ]范围内,并且有
式中:Pi为第i个参考节点发来的RSSI值;μ为RSSI值的数学期望;σ为RSSI值的方差。
2.1.2 引入质心算法
RSSI值优化后,便可求出修正的节点间距,在此基础上引入质心算法,构成三边质心算法,如图2所示,A、B、C都是参考节点,其坐标位置分别是(xa,ya)、(xb,yb)、(xc,yc)。A、B、C到未知节点的测量距离分别是r1、r2、r3。首先利用三边测量法作圆,三圆交点为R、S、T,设其坐标分别为(xr,yr)、(xs,ys)、(xt,yt)。

图2 三边质心测量法
根据式(7)可求得R的坐标。
(7)
同理,可求解出S、T的坐标。未知节点坐标可看作是ΔRST质心的坐标。
(8)
为了保证定位精度,本文取RSSI值位于前四的参考节点求解未知节点坐标,每次选4个中的3个按上述方法计算坐标,总共求出4个坐标,分别为:O1(x1,y1)、O2(x2,y2)、O3(x3,y3),O4(x4,y4)。然后用式(8)求均值,即可算出目标节点O的坐标。
(9)
2.1.3 引入加权因子
在RSSI测距中,参考节点与未知节点的间距越小,受周围环境因素的干扰越小,定位误差会越小。为了降低定位误差,本文引入加权思想。由于节点之间的距离d对定位误差的影响较大,故采用节点间距d建立加权因子。具体的实现方法为:对于n个不同的参考节点A1(x1,y1),…,An(xn,yn),未知节点U(x,y)到各个参考节点的距离值分别为d1,d2,…,dn。起初只研究2个参考节点A1,A2,设这2个参考节点的质心为A12,坐标为(x12,y12),A12与A1的间距为d1,A12与A2的间距为d2,显然有
(10)
由此可得
(11)
选取1/di作为加权因子,最后得出n个参考节点进行定位的加权质心的求解公式,即
(12)
本文采用参加定位的3个圆的半径和的倒数作为加权因子,如果参加定位的参考节点为C1(x1,y1)、C2(x2,y2)、C3(x3,y3)、C4(x4,y4),定位节点O(x,y)到各参考节点的间距分别是d1、d2、d3、d4,利用C1、C2、C3得到O1点的坐标O1(x1,y1),利用C1、C2、C4得到O2点的坐标O2(x2,y2),利用C1、C3、C4得到O3点的坐标O3(x3,y3),利用C2、C3、C4得到O4点的坐标O4(x4,y4),则采用加权质心算法求出O的坐标为
(13)
2.2 质心算法与RSSI值优化的加权质心算法仿真对比及结果分析
采用MATLAB软件对质心算法和RSSI值优化的加权质心算法进行仿真研究,观察分析RSSI值优化的加权质心算法在节点定位中的优势。2种算法对比仿真场景参数如表2表示。

表2 两种算法对比场景参数

图3 两种算法对比节点位置误差
从图中可以看出质心算法的定位结果离节点的真实位置相对要远些。
质心算法和RSSI值优化的加权质心算法仿真对比节点误差与位置的关系曲线如图4所示。由图4可知,质心算法在不同位置的定位误差均高于RSSI值优化的加权质心算法,且质心算法对不同位置节点进行定位的误差起伏较大。因此,在同等条件下,RSSI值优化的加权质心算法在节点定位方面要优于质心算法。
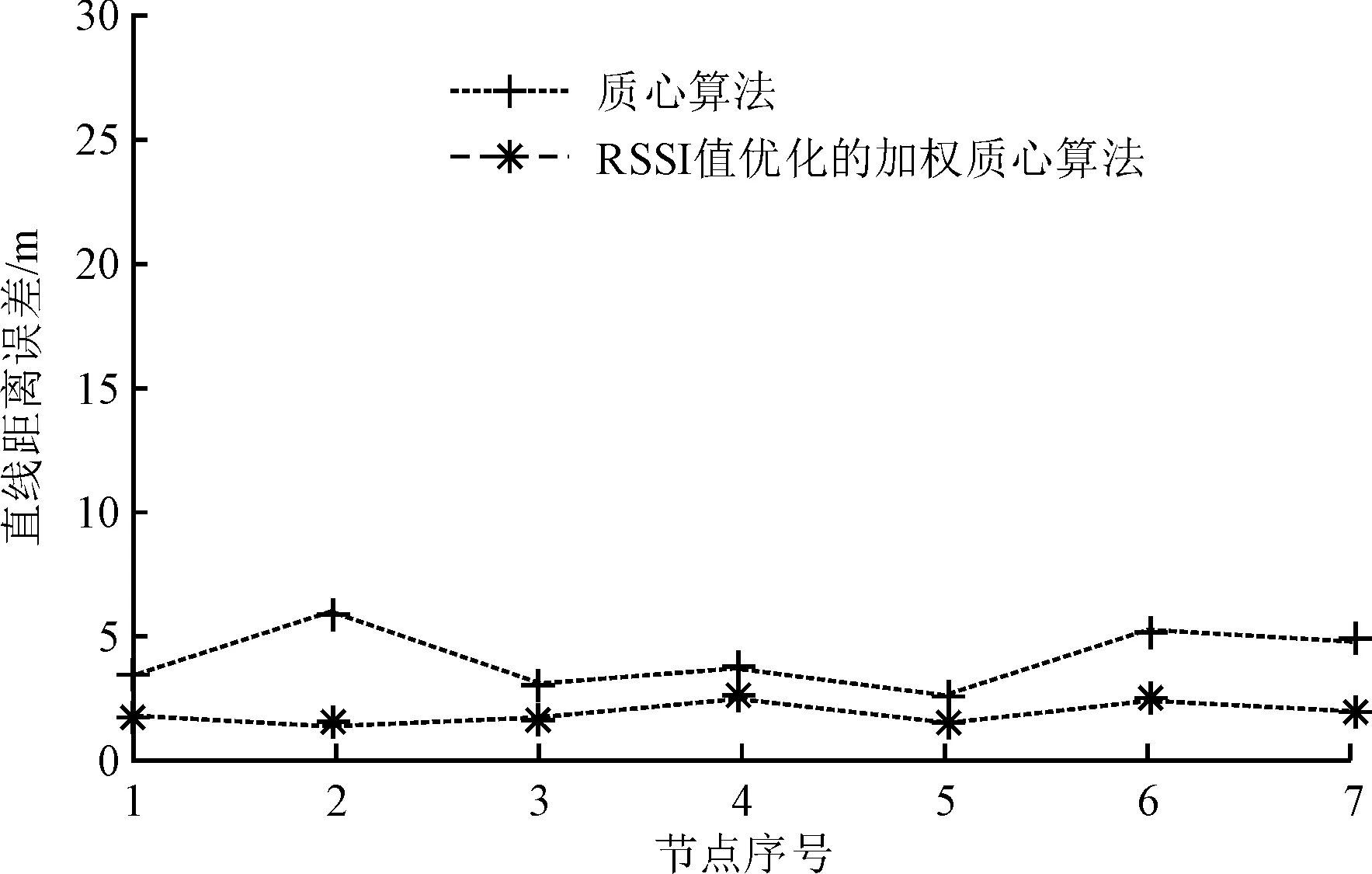
图4 两种算法对比节点误差与位置关系
3 结 语
本文通过研究RSSI加权质心算法并进行理论推理,以及MATLAB试验仿真,验证了该算法的优越性。在实际应用中,选取了某在建高速公路隧道为试验对象,设计了基于RSSI技术的隧道人员定位系统。结果表明,本系统可以对隧道内施工人员进行定位和跟踪,采用RSSI值优化的加权质心算法的定位精度提高,管理人员可实时掌握隧道内施工人员的位置和人身安全等信息。当隧道突发事故时,监控中心可以精准地显示事故发生处施工人员的位置,有利于救援人员在最短时间内找到施工人员,提高救援效率。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年5期)2022-04-02
北京航空航天大学学报(2021年4期)2021-11-24
石家庄铁路职业技术学院学报(2021年1期)2021-06-09
新能源科技(2021年6期)2021-04-02
科学技术创新(2021年7期)2021-03-23
小学生导刊(2018年34期)2018-12-18
航天器工程(2014年5期)2014-03-11
延河(下半月)(2014年3期)2014-02-28
物理与工程(2010年1期)2010-03-25