摊铺机摊铺厚度测量系统的测量精度研究
2018-11-29 09:39王友宝
筑路机械与施工机械化 2018年11期
王友宝
(戴纳派克(中国)压实摊铺设备有限公司,天津 301700)
0 引 言
摊铺厚度是路面摊铺施工质量控制的关键指标之一,与摊铺机结构承载力有着很强的相关性[1-2]。现代摊铺机尽管配备了自动找平控制系统,但受找平控制系统的响应滞后特性影响[3-8],所摊铺路面的平整度总是存在一定的偏差。另外,由于摊铺前路基不平整,也导致摊铺厚度是一个变化量,因此对于摊铺厚度进行检测控制极有必要。
传统的摊铺厚度测量方法是采用随机插入钢钎测量,易受样本数量限制和人为因素的影响[4-13]。近年来,一些领先的摊铺设备制造商推出了安装于摊铺机上的可自动测量摊铺厚度的摊铺厚度测量系统,通过安装于摊铺机前、后侧的距离传感器分别测量摊铺前和摊铺后路面的高度并作差得出摊铺厚度,美国专利US92946904和欧洲专利EP11004888就公开了2种典型的摊铺机摊铺厚度测量系统。
本文介绍上述2种典型的摊铺机摊铺厚度测量系统,并分别建立简化测量模型,以标准差为评价指标,分析不平整路基对2种摊铺厚度测量系统测量精度的影响;提出新的摊铺机摊铺厚度测量系统,以消除不平整路基对于摊铺厚度测量精度的影响,改善测量精度。
1 典型摊铺机摊铺厚度测量系统及测量精度分析
2种典型的摊铺机摊铺厚度测量系统的基本原理均是:在摊铺机前侧设置距离传感器测量摊铺前路基到传感器的距离,在摊铺机后侧设置距离传感器测量摊铺后的路面到传感器的距离,然后将2个测量值作差得出摊铺厚度值。然而,由于路基不平整,当摊铺机行走在路基上,其自身的高度以及倾斜角度均会发生变化,导致前、后距离传感器在高度方向上的位置关系不固定,而位置关系的变化量会引起测量偏差,造成测量精度的下降[14-16]。
第1种摊铺厚度测量系统是在摊铺机上固定安装一个延伸至摊铺机前侧和后侧的刚性梁,前、后距离传感器分别固定于刚性梁的前侧和后侧,如图1所示。

图1 第1种摊铺机摊铺厚度测量系统
第2种摊铺厚度测量系统与第1种的区别在于,刚性梁不是固定于摊铺机上,而是铰接于摊铺机上,并通过额外技术措施始终保持水平或者某一固定角度,如图2所示。
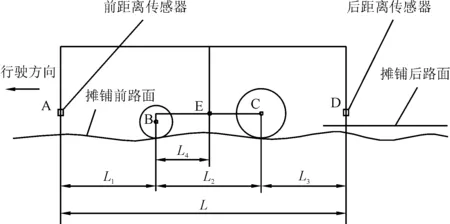
图2 第2种摊铺机摊铺厚度测量系统
当摊铺机行驶于平整的路基上,测量系统测得的摊铺厚度值为理论值,摊铺厚度测量值相对于理论值会产生测量偏差。用于衡量测量系统或测量方法的测量精度最常用的指标是标准差。本文通过对在行驶距离方向上间隔一定步长的若干离散点上的测量误差进行均方差运算以得出标准差。由于测量的理论值已知,标准差
(1)
式中:δi为第i次厚度测量的偏差,i=1…n。
由于只关注测量的偏差,而不关注具体测量值,且此处的测量偏差完全是由前、后距离传感器的相对位置的变化引起的,故设前距离传感器在高度方向上相对于理论位置的偏差为hAi,后距离传感器在高度方向上相对于理论位置的偏差为hDi,则测量偏差
δi=hAi-hDi
(2)
2 摊铺厚度测量系统的简化
为了计算分析方便,本文对摊铺机摊铺厚度测量系统进行简化,并论证其合理性。假设前、后轮中心B、C到路基的高度分别等于前、后轮胎的半径,因此前、后轮中心到路基的高度是固定的。不平整路基在行驶方向上的最大倾斜角度通常较小,因此前、后轮中心到路基的实际高度与轮胎半径之间的差值相对于路面的不平整本身来是可以忽略不计的。如图3所示,以路面最大倾斜角度α=5°为例,设较大的轮胎半径R=500 mm,则轮胎中心到路基的实际高度H与轮胎半径R之间的差值为500×(1/cos 5°-1)≈1.9 mm;而对于5°路面倾斜角度来说,每1 m范围内的路基高度变化值为1 000tan 5°≈87 mm,可见轮胎中心到路基的实际高度与轮胎半径之间的差值与路基本身的高度变化值相比可以忽略。
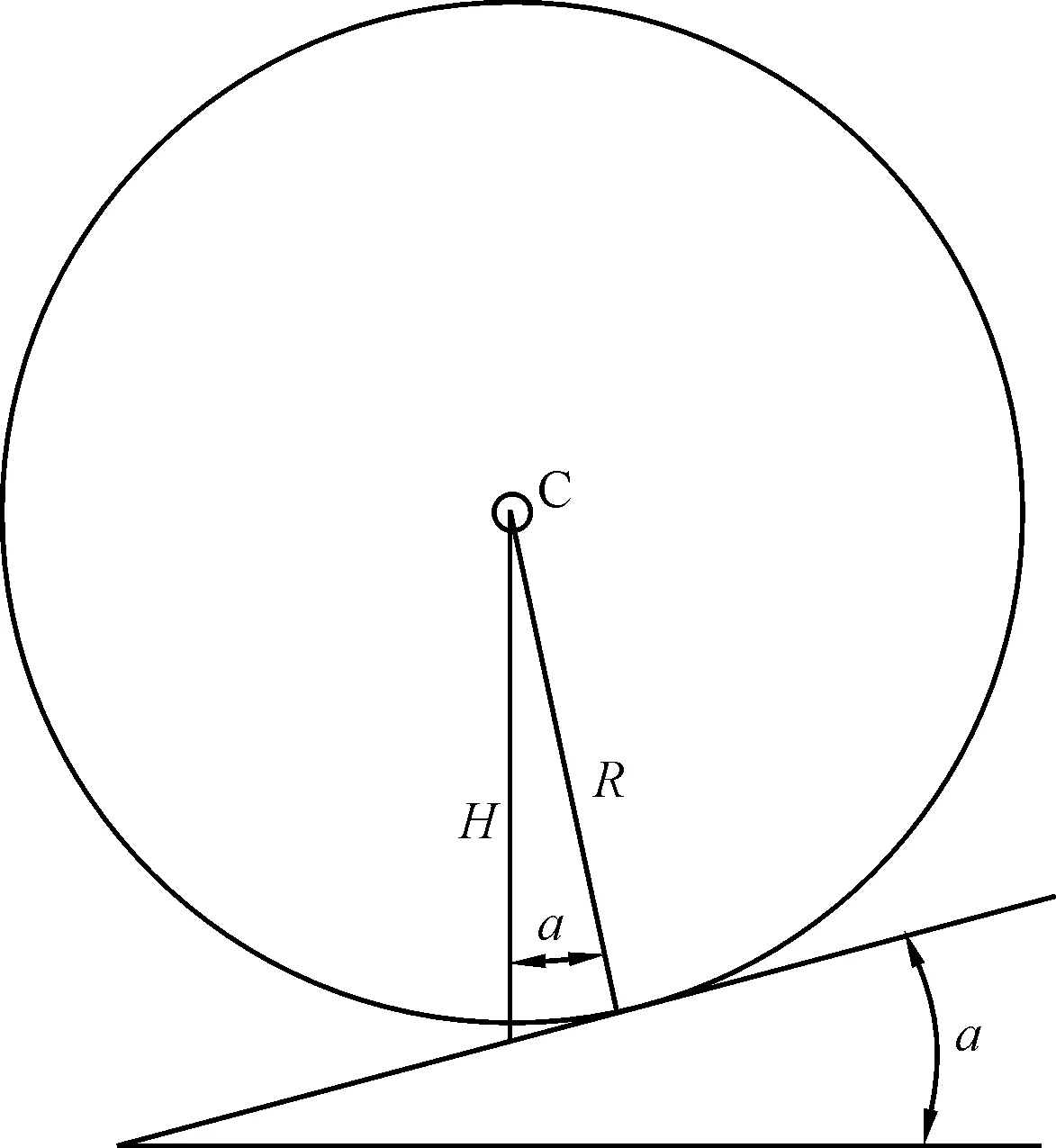
图3 轮胎中心高度简化
假设前传感器A与前轮中心B之间的水平距离为L1,前轮中心B与后轮中心C之间的水平距离为L2,后轮中心C与后距离传感器D之间的水平距离为L3,前轮中心B与刚性架铰接点E之间的水平距离为L4,前距离传感器A与后距离传感器D之间的水平距离为L,且以上水平距离是恒定的。同样以最大倾斜角度5°为例,前、后传感器之间的距离L=6 m,则其水平距离为6cos 5°≈5.977 m,其差值仅为0.023 m,即23 mm,而此差值所引起的高度方向的偏差仅为23tan 5°≈2 mm,与路基本身的高度变化及其引起的前、后距离传感器的高度变化相比可以忽略。
基于以上简化,对于第1种摊铺厚度测量系统,可以得出前距离传感器A第i次高度测量的高度偏差
(3)
式中:hBi和hCi分别为前距离传感器第i次测量时前轮中心B和后轮中心C的高度偏差。
当后距离传感器D到达前距离传感器A之前的测量位置时,摊铺机已经向前行驶了前、后距离传感器之间的距离L。为了计算方便,取步长l=L/a,其中a为正整数,得出第i次厚度测量时后距离传感器D的高度偏差
(4)
式中:hB(i+a)和hC(i+a)分别为前距离传感器第i+a次测量时前轮中心B和后轮中心C的高度偏差。
对于第2种摊铺厚度测量系统,前、后距离传感器的高度偏差就分别是测量时刚性架铰接点E的高度偏差,可以得出
式中:hEi和hE(i+a)分别为前距离传感器第i、i+a次厚度测量时刚性架铰接点E的高度偏差。
设不平整路基偏离理想水平平整路面的偏差函数为
h=f(x)
(7)
式中:x为行驶方向上的位移。
由于仅当前、后轮中心全部进入此不平整路基时,评估不平整路基对于摊铺厚度测量精度的影响才具有意义,因此第1次摊铺厚度测量在后轮中心恰好进入不平整路基时进行,则
而第i次厚度测量时前距离传感器的位置
xAi=L1+L2+l(i-1)
(12)
前、后轮中心的高度偏差分别为
hBi=f(xBi)=f[L2+l(i-1)]
(13)
hCi=f(xCi)=f[l(i-1)]
(14)
hB(i+a)=f(xB(i+a))=f[L+L2+l(i-1)]
(15)
hC(i+a)=f(xC(i+a))=f[L+l(i-1)]
(16)
3 实例分析
对于某一具体摊铺机摊铺厚度测量系统,取L1=2 m、L2=2 m、L3=2 m、L4=1 m,则L=6 m。摊铺厚度测量步长l=0.1 m,则a=60。

可以计算出第1种摊铺厚度测量系统的标准差约为58.1 mm,第2种摊铺机厚度测量系统的标准差约为18.9 mm。
作为比较,同样计算后轮中心的高度偏差,即不平整路基本身的标准差
由于第1种摊铺厚度测量系统的前、后距离传感器之间的相对位置关系不仅受摊铺机高度变化的影响,还受摊铺机角度变化的影响,因此其测量标准差相对于不平整路基本身的标准差具有放大效应;第2种摊铺厚度测量系统的前、后距离传感器之间的相对位置关系仅受摊铺机高度变化的影响,消除了摊铺机角度变化的影响,因此其测量标准差明显小于第1种摊铺厚度测量系统。此外,由于刚性架铰接点的高度偏差为前、后轮中心的高度偏差的折中值,因此第2种摊铺厚度测量系统的测量标准差小于不平整路基本身的标准差。
4 新摊铺机摊铺厚度测量系统
基于前述分析,可以发现不平整路基对摊铺厚度测量系统测量精度造成的不利影响根本上是由于摊铺机本身的高度或者角度的变化影响了前、后距离传感器在高度方向上的相对位置。
因此,本文提出一种新的引入找平基准的摊铺厚度测量系统,如图4所示。新测量系统中,前、后距离传感器可以是与找平基准上下随动的普通距离传感器,其测量值分别就是摊铺前、后的路面到找平基准的距离;也可以是集成传感器,前距离传感器可以同时测量传感器到摊铺前的路面和找平基准的距离,后距离传感器可以同时测量传感器到摊铺后的路面和找平基准的距离。找平基准可以是相邻的已铺设好的路面,或是现有的路缘,或是常见的人工架设的从一个标桩到另一个标桩的钢丝绳。

图4 新摊铺机摊铺厚度测量系统
当前、后距离传感器是在高度方向上与找平基准上下随动的普通距离传感器时,前、后距离传感器在高度方向上的相互位置关系不受不平整路基引起的摊铺机自身的高度或角度变化的影响。
当前、后距离传感器为集成传感器时,固定安装于摊铺机前侧和后侧的前、后距离传感器在高度方向上的相对位置关系虽然会受摊铺机自身的高度或角度变化的影响,但由于其同时测量到找平基准的距离,因此前、后距离传感器本身的高度偏差在计算中可以被补偿消除。
5 结 语
(1)摊铺厚度测量系统的简化测量模型可以较好地用于分析不平整路基对前、后距离传感器的高度偏差以及摊铺厚度测量系统测量精度的影响。
(2)第1种摊铺厚度测量系统会受摊铺机自身的高度变化和角度变化的双重影响,因此其测量的标准差相对于不平整路基本身的标准差具有放大效应,测量精度较差。
(3)第2种摊铺厚度测量系统仅受摊铺机自身高度变化的影响,其测量标准差小于不平整路基本身的标准差,优于第1种摊铺机摊铺厚度测量系统。
(4)本文提出了新摊铺厚度测量系统,引入找平基准作为摊铺厚度测量基准,避免了不平整路基对于测量精度的影响,具有较高的应用推广价值。
猜你喜欢
石材(2022年2期)2022-05-25
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
系统医学(2016年8期)2016-02-20
城市道桥与防洪(2013年8期)2013-03-11
空间控制技术与应用(2010年3期)2010-12-23