独立车轮轻轨车辆集成控制研究
2018-12-07 01:00孙效杰陆正刚杨俊起
铁道科学与工程学报 2018年11期
孙效杰,陆正刚,杨俊起
独立车轮轻轨车辆集成控制研究
孙效杰1,陆正刚2,杨俊起3
(1. 上海应用技术大学 轨道交通学院,上海 201418;2. 同济大学 铁道与城市轨道交通研究院,上海 201804;3. 河南理工大学 电气工程与自动化学院,河南 焦作 454000)
运用轨道车辆信息估计技术,获取轮对状态和未知线路特征信息,其中估计的左右轮转速和线路信息,实现速差反馈导向控制;估计的摇头角,用于稳定性集成控制,替代一系纵向悬挂。最后,使用典型的独立车轮轻轨车辆模型对估计与集成控制技术仿真验证,研究结果表明:基于信息估计的集成控制,轮对导向性能均非常优秀,轮缘不贴靠钢轨,摇头角/冲角小;集成控制系统对电机的功率需求最大不足60 W,电机力矩需求约为牵引电机额定转矩的1/5,实际牵引电机可以 满足。
轻轨车辆;主动导向;稳定性控制;信息估计
轮对主动控制是独立车轮轨道车辆的核心技术,相关研究如基于摇头反馈控制的电机驱动独立车轮主动控制[1−2];采用卡尔曼滤波估计的轮轨间隙作为反馈量的独立车轮导向控制[3];电机单独驱动独立车轮的主动导向与牵引集成控制[4];基于轮毂电机的独立车轮轮对转速差反馈导向技术[5]。这些主动导向控制一般采用车轮转速差、横移量(轮轨间隙)或摇头角等作为反馈量,其中速差反馈控制因易于测量而倍受关注。但速差反馈控制存在2个方面问题:1) 需实时获取线路曲率信息,间接测量因可靠和方便而成为研究热点,MEI等[6−7]利用卡尔曼滤波器和H∞滤波器估计线路信息;王雪梅等[8]在摆式列车中使用陀螺仪和位移传感器检测线路超高和曲率信息,但上述方案使用传感器数目多、费用高;2)一系纵向悬挂对独立车轮速差导向控制和轮对稳定性的作用是彼此矛盾的,“天棚弹簧”理论被提出,通过“弹簧”产生正比于轮对摇头角的约束力矩,抑制轮对的摇头运动,实现稳定性控 制[9]。针对轮对状态及线路信息获取问题,笔者在孙效杰等[10]提出一种使用传感器数量少、估计系统简单的轮对状态估计与线路信息共同估计技术。针对电机独立驱动的独立车轮轻轨车辆,取消一系纵向悬挂而使用稳定性控制替代。基于文献[10]的研究成果,本文探讨一种通过控制左右轮牵引电机的输出转矩以实现速差导向与稳定性的集成控制技术。该技术利用牵引电机作为2种控制方法的作动器,系统集成度高。另外,集成控制系统中,速差控制需要的线路曲率和左右车轮转速差,稳定性控制需要轮对摇头角,都使用观测器估计获得。该基于信息估计的独立车轮集成控制,不仅进一步提升独立轮对导向控制性能,更将增强控制系统的鲁棒性。
1 独立车轮主动导向与稳定性集成控制
1.1 独立车轮轻轨车辆系统建模
本文研究的重点是独立车轮轻轨车辆的主动导向与稳定性集成控制,为了简化建模与降低仿真难度,模型采用轻轨列车中常见的单车型车辆,只包含一个两轴转向架和一个车体。该车辆横向动力学方程如式(1)~(7),其中轮对考虑横移,摇头和左右车轮相对转动3个自由度,而构架和车体只考虑横移和摇头2个自由度。
轮对横移:当=1或2,=1;


轮对摇头:当=1或 2,=1;

左右车轮相对转动:=1或2

转向架横移:


转向架摇头:



车体横移:

车体摇头:


将独立车轮轻轨车辆横向动力学方程写成状态方程形式,且令方程中的状态为:

将车辆模型的轨道输入(包括线路曲率,超高角以及轨道不平顺)作为系统未知输入,则未知输入为:

令补充线路曲线信息的轮对横向速差导向控制力矩为可测输出,则可测输出为:

针对系统状态的估计,因为部分状态已经测得,利用降维观测器估计获得余下未测系统状 态[11];基于降维观测器获取的状态渐近估计后,再使用系统状态重构出系统未知输入,其中可测输出的微分使用高阶、高增益滑模观测器估计[12]。

系数矩阵,和可通过方程获得,限于篇幅不再列出。
1.2 牵引、导向与稳定性集成控制策略
将主动稳定性控制应用到电机独立驱动的独立车轮轻轨车辆,同时使用独立车轮牵引与导向控制技术,最终电机独立驱动的独立车轮实现牵引、速差导向和稳定性的集成控制。左右车轮牵引电机输出转矩方程为[13]:


其中:tract表示电机牵引转矩;和分别表示速差控制和稳定控制函数;表示高通滤波器。式(8)中,牵引控制是通过控制电机转速跟随给定转速实现车辆行驶;速差主动导向控制是以左右车轮转速差与理想速差的偏差作为反馈;稳定性控制是根据轮对摇头角反馈控制电机转矩差。
利用电机转矩的独立轮对牵引、主动导向与稳定集成控制,其关键在于实时获取车辆运行速度,左右车轮转速差,当前线路曲率和轮对摇头角等信息。其中车辆运行速度易于检测,当前车辆信息系统可提供;左右车轮转速差可通过安装转速或位置传感器测得。当传感器故障或者不使用传感器时,使用观测器估计获得。轮对摇头角或冲角信息,使用降维状态观测器进行估计获得;而轨道线路的曲率则基于系统状态和可测输出的微分信号通过重构获得。本文提出的基于观测器的轮对集成控制策略如图1所示。
2 集成控制仿真研究
因重点关注独立车轮车辆导向与稳定性控制问题,所以不考虑电机牵引而让车辆以恒速运行。主动控制策略中,速差控制函数和稳定控制函数均采用经典的比例积分控制方法,其中速差控制函数的比例系数k与积分系数k均为1×106;稳定性控制高通滤波器截止频率为1 Hz,系数k=1.5×107。仿真线路选用典型的低速曲线,曲线半径为200 m,车辆运行速度为20 m/s。
主动控制中需要的轮对状态信息,如稳定性控制中的轮对摇头角或冲角信息,速差导向控制中需要获得左右车轮的转速差,均使用状态观测器估计获得;理想速差计算中的轨道线路的曲率,则基于系统状态和可测输出的微分信号通过重构获得。最终在MATLAB/Simulink环境搭建的基于观测器的独立轮对车辆主动集成控制模型见图2。
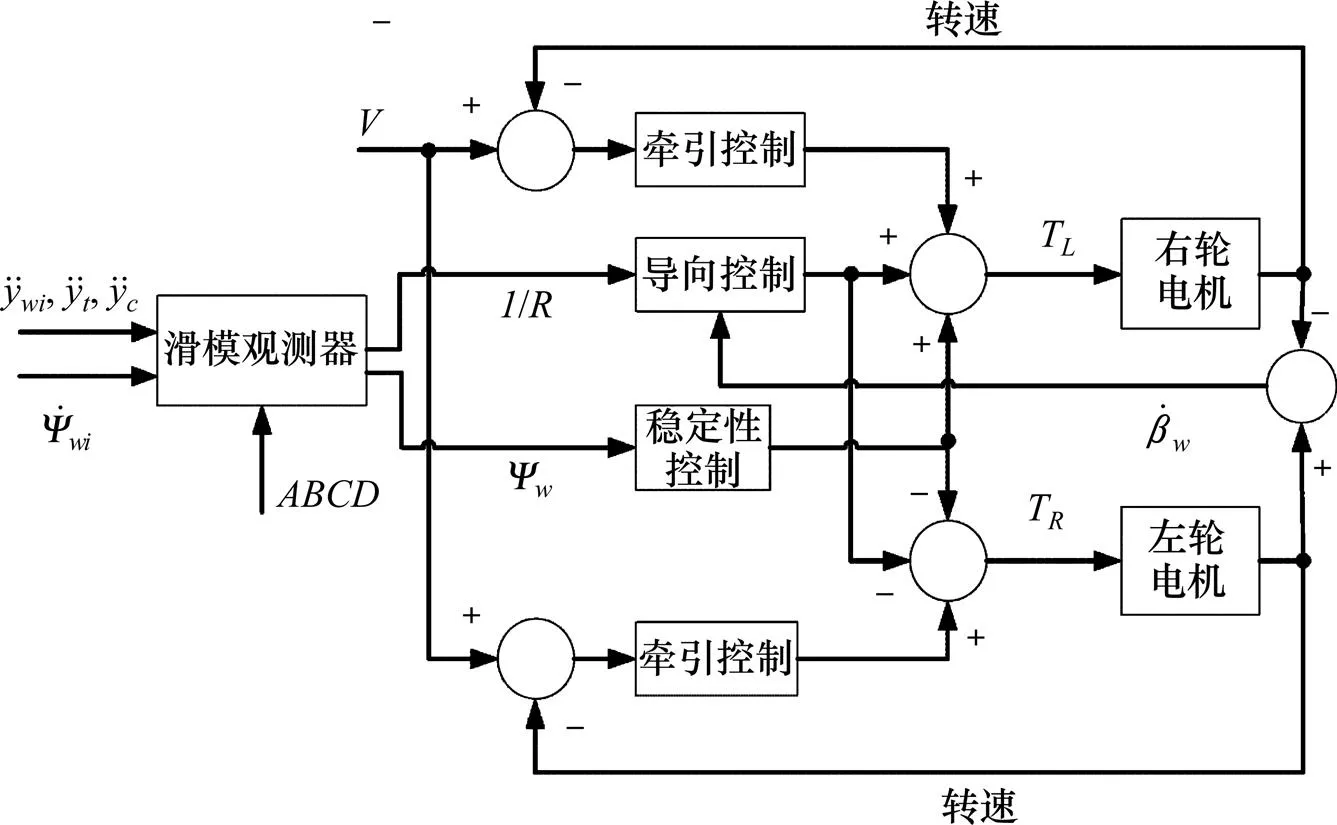
图1 基于观测器的轮对主动集成控制策略
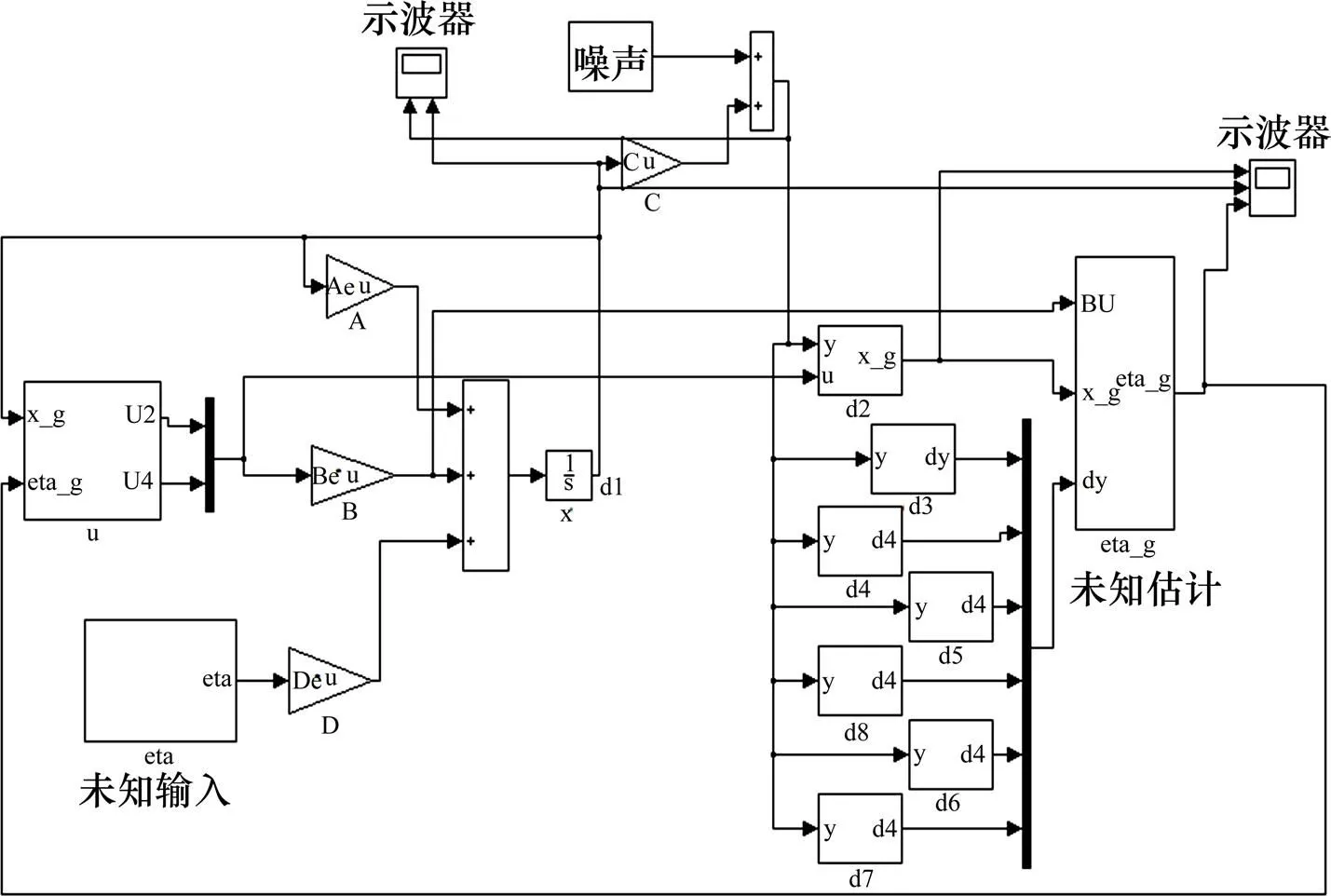
图2 基于观测器的轮对导向与稳定性集成控制
模型中,基于观测器的车辆状态估计与线路特征重构子系统的原理如图3。由于传感器已经测定轮对、构架和车体的横移速度以及轮对的摇头速度共计6个系统状态,状态估计使用降维观测器(维数为−=14)估计14个未测的运动状态。因轮对横移量,轮对摇头角或冲角以及左右车轮相对转速等轮对状态,可直接用于独立轮对的主动导向反馈控制和系统性能评估,所以状态估计中重点考察轮对状态。然后,利用降维观测器估计的车辆状态信息,再根据高阶滑模观测器估计出可测输出(维数为6)的微分信号。在此基础上,根据降维观测器估计的车辆系统状态和高阶滑模观测器估计的可测输出之微分,重构出线路的曲率和超高信息。
一系纵向定位弹簧与轮对曲线导向能力矛盾,纵向刚度越大,过曲线时越容易出现轮缘接触和较大的轮轨噪声。因此取消一系纵向弹簧,基于轮对主动悬挂的稳定性控制被提出来,利用主动悬挂能够灵活地选择悬挂系统的频率特性的优点,可克服被动悬挂对高频的蛇行运动和低频的导向运动具有同样的抑制作用的缺陷。

图3 基于观测器的车辆状态估计与线路特征重构原理图
首先比较取消一系纵向定位刚度的稳定性集成控制和一系被动悬挂2种模式下的导向性能和导向力矩需求。其中轮对摇头刚度在被动悬挂系统中和稳定性控制取值相同,均为15 MN/rad。
稳定性集成控制与被动悬挂的仿真结果如图4所示:稳定性控制和被动悬挂的速差导向车辆,轮对1和2的导向性能均非常优秀,横移量小于0.3 mm,冲角小于0.5 mrad;稳定性控制相对于被动悬挂,轮对的导向性能更优,轮对1和2的冲角和横移量均小于被动悬挂;稳定控制的轮对1和2电机所需导向力矩不足20 N∙m,远小于被动悬挂(特别是轮对2接近600 N∙m)。因此独立轮对稳定性控制具有明显的技术优势。
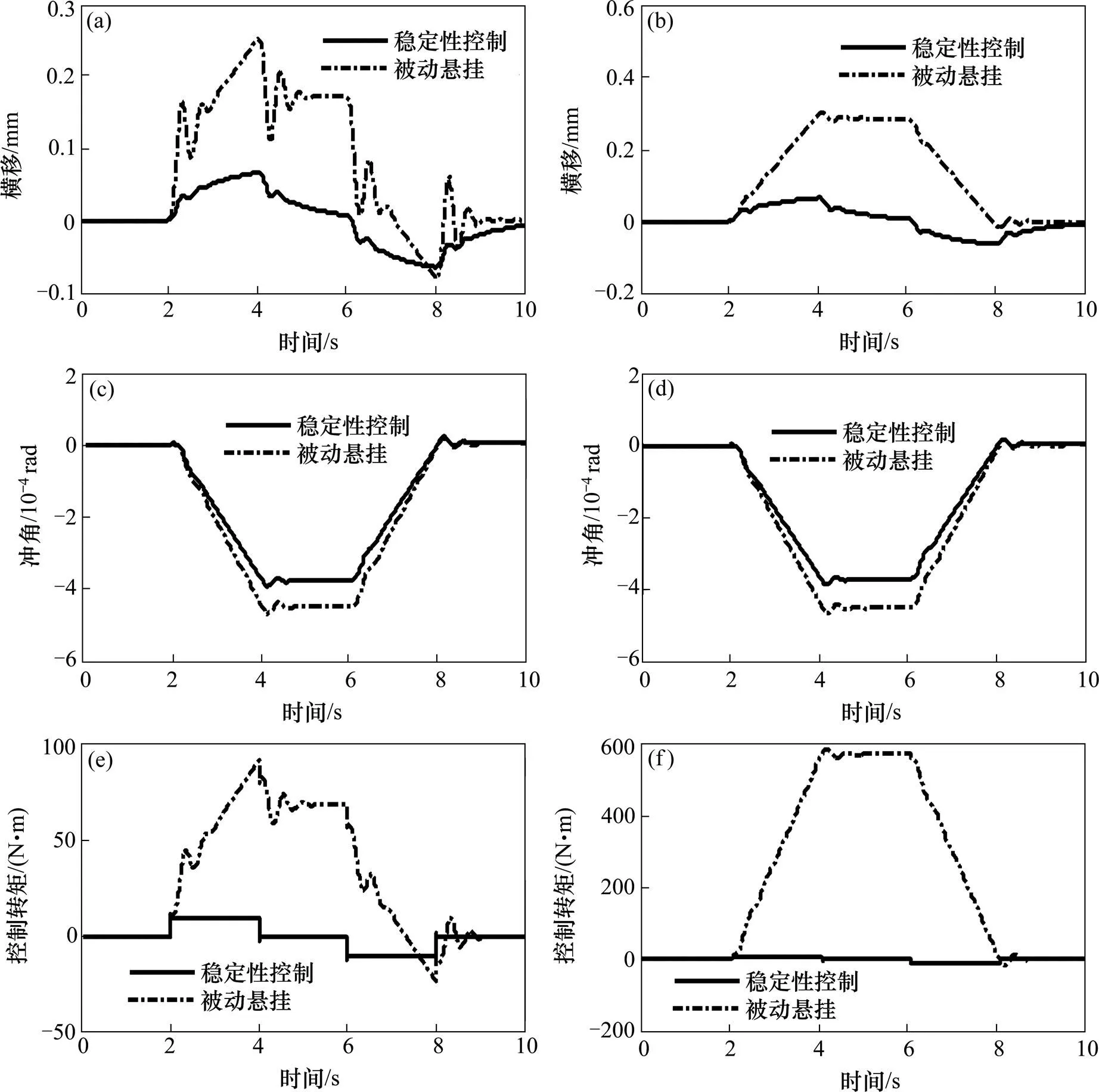
(a), (c), (e) 轮对1;(b), (d), (f) 轮对2
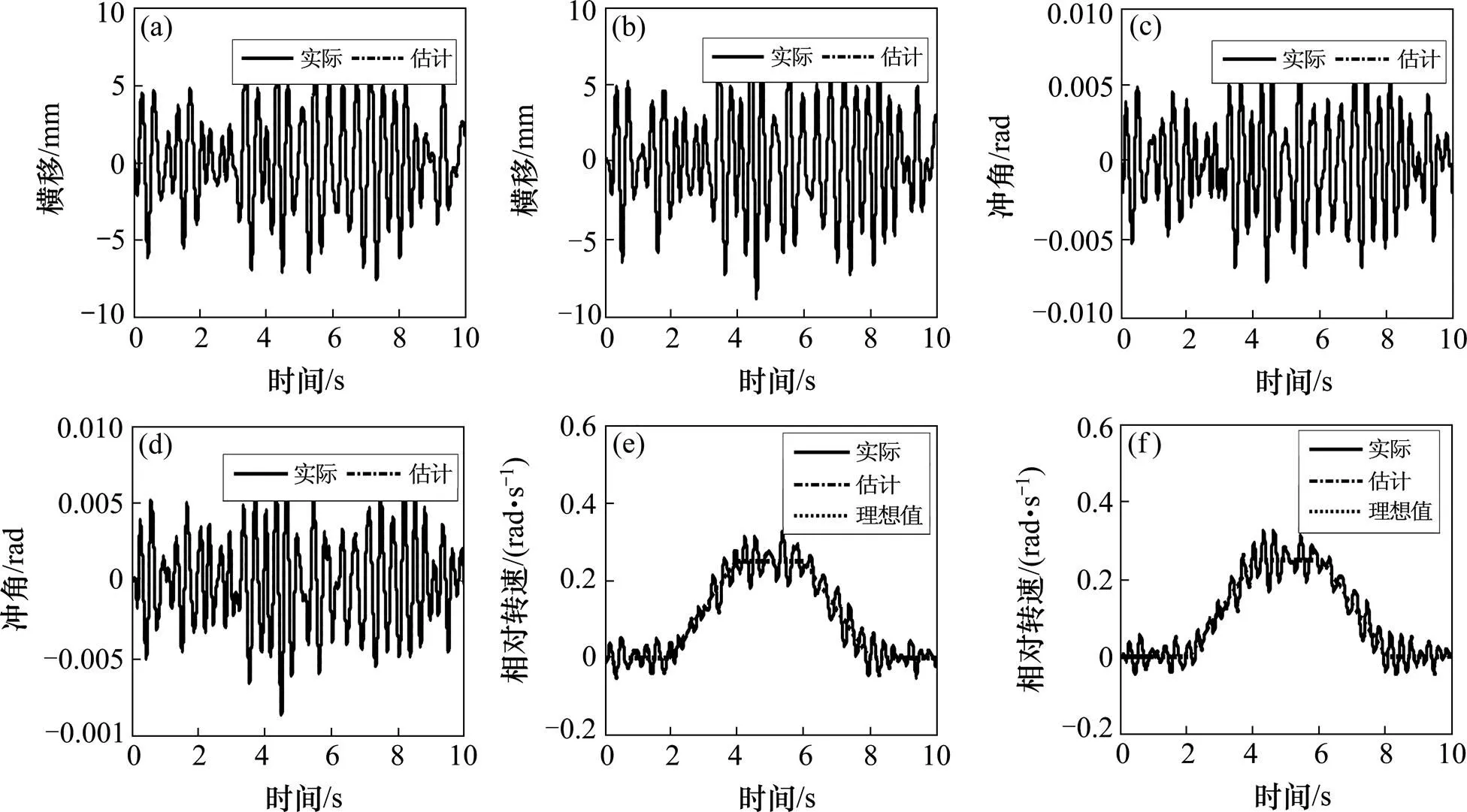
主动导向与稳定性集成控制仿真时,考虑无轨道不平顺和有轨道不平顺(美国六级谱)2种情况,轮对状态估计与主动控制仿真结果如图5和图6。从估计效果来看,无论轨道不平顺是否存在,轮对状态估计结果与实际值均非常接近,偏差极小,观测器效果良好。从主动控制效果来看,无轨道不平顺输入时,轮对横移量最大值仅为0.05 mm,十分接近为0,与理论分析结果一致,轮对沿着轨道中心线运行;轮对冲角最大为0.4 mrad,接近完全径向位置;实际左右相对转速与理论值几乎重合。有轨道不平顺时,集成控制的曲线轮对横移小于6 mm,冲角仍然较小,最大值不足6 mrad,左右车轮相对转速在理论值附近波动。

(a), (c), (e) 轮对1;(b), (d), (f) 轮对2
从主动控制时电机耦合力矩需求和功率需求看(图7),无轨道不平顺时,主动控制下电机最大需求力矩仅为10 N·m,最大功率需求仅为3 W;而有轨道不平顺时,电机瞬时最大需求力矩254 N·m,最大功率为53 W。一般轻轨车辆直接驱动独立车轮的牵引电机,其额定功率在50~60 kW,额定力矩不低于1 200 N∙m。主动控制下的电机功率和力矩需求相对于牵引电机的额定值,在不考虑轨道不平顺时几乎可以忽略;考虑轨道不平顺的影响,电机功率需求依然可忽略,电机力矩需求约为牵引电机额定转矩的1/5,相当于牵引电机过载20%,该技术要求在实际牵引电机上可以满足。
(a), (c), (e) 轮对1;(b), (d), (f) 轮对2

(a1), (a2) 无轨道激扰;(b1), (b2) 考虑轨道激扰
3 结论
1) 集成控制的导向性能优于一系纵向悬挂的速差导向控制,无轨道不平顺时,轮对实现了沿着轨道中心线运行的目标,轮对接近径向位置;考虑轨道不平顺,集成控制下轮对横移量不会造成轮缘贴靠钢轨,轮对冲角仍然很小。
2) 无论是否存在轨道不平顺,集成控制系统对电机的功率需求均不足60 W,相对于牵引电机的额定值几乎可以忽略。考虑轨道不平顺,电机力矩需求约为牵引电机额定转矩的1/5,相当于要求牵引电机最大过载20%,牵引电机可以满足。
3) 集成控制进一步提升主动控制效果,且对控制系统的力矩和功率需求明显下降。
[1] MEI T X, LI H, Goodall R M, et al. Dynamics and control assessment of rail vehicles using permanent magnet wheel motors[J]. Vehicle System Dynamics, 2002, 37(Suppl): 326−337.
[2] LIANG B, Iwnicki S D. An experimental study of independently rotating wheels for railway vehicles[C]// 2007 International Conference on Mechatronics and Automation. Harbin: IEEE, 2007: 2282−2286.
[3] LI H.Measuring systems for active steering of railway vehicles[D]. Loughborough: Loughborough University, 2001.
[4] Perez J, Busturia J M, Mei T X, et al. Combined active steering and traction for mechatronic bogie vehicles with independently rotating wheels[J]. Annual Reviews in Control, 2004, 28(2): 207−217.
[5] 任利惠, 周劲松, 沈钢. 采用轮毂电机的独立车轮轮对的主动导向控制[J]. 中国铁道科学, 2010, 31(5): 77−83. REN Lihui, ZHOU Jinsong, SHEN Gang. The active steering control of the indenpendent wheelsets with the hub motors[J]. Chinese Railway Science, 2010, 31(5): 77−83.
[6] MEI T X, LI H, Goodall R. Kalman filters applied to actively controlled railway vehicle suspensions[J]. Transactions of the Institute of Measurement and Control, 2001, 23(3): 163−181.
[7] ZHOU R, Zolotas A, Goodall R. Robust system state estimation for active suspension control in high-speed tilting trains[J]. Vehicle System Dynamics, 2014, 52(Suppl): 355−369.
[8] 王雪梅, 倪文波, 李芾. 基于陀螺平台的摆式列车线路信息检测系统研究[J]. 中国铁道科学, 2004, 25(1): 41−45. WANG Xuemei, NI Wenbo, LI Fu. Research on gyroscope platform based titling train railway line information inspection system[J]. China Railway Science, 2004, 25(1): 41−45.
[9] MEI T X, Goodall R M. Stability control of railway bogies using absolute stiffness: sky-hook spring approach[J]. Vehicle System Dynamics, 2006, 44(Suppl): 83−92.
[10] 孙效杰, 杨俊起. 轨道车辆轮对状态与线路特征的估计[J]. 西南交通大学学报, 2017, 52(3): 600−606. SUN Xiaojie, YANG Junqi. Information estimation on wheelset state and track features of railway vehicles[J]. Journal of Southwest Jiaotong University, 2017, 52(3): 600−606.
[11] 杨俊起, 朱芳来. 状态估计与未知输入和可测噪声同时重构方法[J]. 控制与决策, 2013, 23(8): 1145−1151. YANG Junqi, ZHU Fanglai. State estimation and simultaneous unknown input and measurement noise reconstruction[J]. Control and Decision, 2013, 23(8): 1145−1151.
[12] 陈滟涛, 杨俊起, 钱伟. 基于降维观测器和超螺旋算法的执行器故障重构方法[J]. 信息与控制, 2013, 42(5): 560−564. CHEN Yantao, YANG Junqi, QIAN Wei. Actuator fault reconstruction method based on reduce-order observer and super-twisting algorithm[J]. Information and Control, 2013, 42(5): 560−564.
[13] 孙效杰. 独立车轮电气耦合转向架关键技术研究[D].上海: 同济大学, 2014. SUN Xiaojie. The key technical research on electrical coupled bogie with independently rotating wheels[D]. Shanghai: Tongji University, 2014.
Combined control research on LRV with independently rotating wheels
SUN Xiaojie1, LU Zhenggang2, YANG Junqi3
(1. School of Railway Transportation, Shanghai Institute of Technology, Shanghai 201418, China;2. Railway and Urban Mass Transit Research Institute, Tongji University, Shanghai 201804, China;3. College of Electrical Engineering and Automation, Henan Polytechnic University, Jiaozuo 454000, China)
An information estimation technique for rail vehicle is used to get the wheelset station and unknown track characteristics. Using the estimated wheel rotating speed and track curvature, the active steering control via the speed differential feedback is realized; based on the estimated yaw angle, the integrated stability control is used to replace the longitudinal suspension. Finally, the typically LRV with independently rotating wheels is applied to verify the proposed methods. The results show that the integrated control technology based on the estimation information are very good in steering performance, flange is not close to rail, yaw /attack angle is small; the maximum power demand is 60 W, and torque demand is about 1/5 of the rated torque for each traction motor. The traction motor can completely satisfy the demand.
LRV; active steering; stability control; information estimation
10.19713/j.cnki.43−1423/u.2018.11.030
TM351;U270.33
A
1672 − 7029(2018)11 − 2972 − 08
2017−09−19
中央财政支持地方高校发展专项资金资助项目(4521ZK160013002);上海高校青年教师培养资助计划项目(ZZZZyyx16023)
陆正刚(1966−),男,江苏新沂人,教授,博士,从事轨道车辆系统集成与控制研究;E−mail:luzhenggang@tongji.edu.cn
(编辑 阳丽霞)
猜你喜欢
作文成功之路(高考冲刺)(2022年8期)2022-11-21
数学大王·低年级(2021年2期)2021-02-21
当代陕西(2020年23期)2021-01-07
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
小读者(2019年24期)2020-01-19
汽车观察(2019年2期)2019-03-15
北京航空航天大学学报(2017年6期)2017-11-23
中国洗涤用品工业(2017年2期)2017-04-16
电子制作(2017年24期)2017-02-02