低耦合度且部分解耦的3T1R并联机构设计与分析
2019-03-06 09:07沈惠平许正骁邓嘉鸣杨廷力
农业机械学报 2019年2期
沈惠平 许正骁 许 可 邓嘉鸣 杨廷力
(常州大学现代机构学研究中心, 常州 213016)
0 引言
具有空间三平移一转动(3T1R)功能的并联机器人操作手因其具有工作空间大、易实现高速、成本低等优点,越来越多地应用于电子产品、塑料和食品工业等制造领域。这类少自由度并联机构,一般结构复杂、耦合度高、运动输入-输出不解耦,且易出现奇异位置,因此,四自由度3T1R并联机构新机型的设计和性能研究,一直受到国内外学者的关注和研究[1-14]。已有的3T1R机构中,大部分耦合度(κ=2)大且运动不解耦,给运动控制及轨迹规划带来了困难。本课题组提出了一种非对称结构的低耦合度、运动解耦的3T1R并联操作手,但易发生奇异位置[15-16]。
本文提出一种低耦合度且输入-输出运动解耦、可用冗余支链避免奇异位置的大转动能力4自由度3T1R并联机器人新机构,结构上为部分对称;对此机构进行拓扑特性(POC集、自由度、耦合度、运动耦合性)以及运动学分析(机构位置正逆解求解、工作空间与转动能力、奇异位置,以及速度、加速度),以揭示该并联机构的拓扑结构与运动学特性。
1 3T1R并联机构设计及拓扑分析
1.1 机构设计
根据基于POC方程的并联机构拓扑结构设计理论,为设计低耦合度、输入-输出运动解耦、冗余支链消除奇异位置的并联机构,必须满足以下条件:①支链回路约束度低,以实现低耦合度(κ=0或1)。②要求包含2个以上的基本运动链(BKC),以实现运动部分解耦性。③根据POC集分析、自由度分析,对支链在动静平台之间作特殊布置,以实现冗余支链消除奇异位置。据此,提出一种含冗余支链的、低耦合度(κ=1)、输入-输出具有部分运动解耦的4-DOF 3T1R并联机器人新机构,如图1所示。

图1 低耦合度且部分运动解耦的3T1R并联机构Fig.1 3T1R parallel mechanism with low coupling and partial motion decoupling
具体设计过程如下:
(1)本机构由1条混合支链、2条无约束支链SOC2{R21-S22-S23}和SOC3{R31-S32-S33}组成。
(2)混合支链(Hybrid single-open-chain,HSOC1)为对称结构,它包含4个分支链A、B、C、D。一个由4个球副组成平行四边形(◇S1S2S3S4),其一短边杆3与驱动杆2固接后用转动副R11与静平台0连接,为支链A,记作RPa(4S);其对边的短边杆5的右侧延伸端,与两杆(7、6)三平行轴线转动副组(R41‖R42‖R43)(记支链B)并联连接;短边杆5的左侧延伸端,与另一两杆(7′、6′)三平行轴线转动副(R51‖R52‖R53)(记支链C)也并联连接,这样,支链A与B(或A与C)构成一个子并联机构,记作:RPa(4S)3R;同时,短边杆5的上侧通过与其固接的杆8,与一杆(9)两平行轴线的转动副组(R12‖R13)(记支链D)串联连接,但R12⊥R43。整个混合支链记为(RPa(4S)3R)⊥2R。
(3)静平台0上的各转动副轴线的布置关系为:R11⊥R41,R11⊥R51;而R41与R31的轴线、R51与R21的轴线均重合,其布置整体上对称于x轴(S-S连线)。
1.2节将说明:混合支链子并联机构(RPa(4S)3R)的子平台输出杆5将产生两平移的输出(即等效于P-P);而整个混合支链(RPa(4S)3R)⊥2R的末端(即动平台1的一部分)将产生三平移一转动(绕R13)的输出。
1.2 机构拓扑分析
1.2.1POC集分析
由文献[17-18]可知,串联、并联机构的POC集方程分别为
(1)
(2)
式中MJi——第i个运动副的POC集
Mbi——第i条支链末端的POC集
MPa——机构动平台的POC集
取本机构动平台上任意一点O′为基点,下面依次确定3条支链末端构件、定动平台的POC集。
由1.1节可知,HSOC1包含A、B、C、D 4个支链,它们的构成分别为RPa(4S)(支链A)、R41‖R42‖R43(支链B)、R51‖R52‖R53(支链C),以及R12‖R13(支链D)。因此,由式(1)、(2)可得
MHSOC1=(MA∩MB∩MC)∪MD
其中


由式(2)可得
(3)
由式(3)可知,因支链A、B构成一子并联机构,其输出杆5已得到两平移零转动(2T0R)的输出,且支链C与支链B的拓扑结构完全相同,因此,支链C已属于冗余支链。因此,可取其转动副R51为冗余驱动副。机构正常工作时,支链C处于被动的随动状态;当机构出现奇异时,该冗余驱动副R51产生动作,以消除机构的奇异位置,其理论证明详见4.3节。
由式(1)可得

易知SOC2、SOC3为无约束支链,为
由式(2)可得

因此,当静平台0上的4个转动副R11、R21、R31和R41为主动副时,动平台1即产生3个移动和1个转动(绕转动副R13的轴线)输出。
1.2.2自由度计算
并联机构全周DOF一般公式[15]为
(4)

(5)
v=m-n+1
式中F——机构自由度
fi——第i个运动副自由度
m——运动副数n——构件数
v——独立回路数
ξLj——第j个独立回路的独立位移方程数

Mb(j+1)——j+1条支链末端构件的POC集
由支链A、B组成的第1个回路,记作{R11-P*-P*-R*-R*-R43∥R42∥R41}(其中,4S平行四边形等效于P*-P*-R*-R*),由式(5)得
由第1回路组成的第1个子并联机构的DOF和POC集,由式(4)得
F(A-B)=∑f-ξL1=(5+3)-6=2
由式(3)可得
由第1个子并联机构与支链D、左侧无约束支链SOC2构成第2个回路,记作{R12-R13-S23-S22-R21},由式(5)得

因此,由第2回路组成的第2个子并联机构的DOF、POC集,由式(4)得
F(A-B-D-SOC2)=∑f-(ξL1+ξL2)=
(8+8)-(6+6)=4
由式(1)、(2)得

由第2个子并联机构与右侧无约束支链SOC3构成第3个回路,记作{S33-S32-R31},由式(5)得
因此,由式(4)得机构自由度
1.2.3耦合度计算
由基于单开链(SOC)单元的机构组成原理[15,17-18]知,任一机构可分解为一系列单开链,第j个单开链(SOC)的约束度为
(6)
式中mj——第j个SOC的运动副数
Ij——第j个SOC的驱动副数
进一步,一组有序的v个SOC可构成一个独立回路数为v的基本运动链(Basic kinematics chain,BKC),对一个BKC而言,须
因此,耦合度为
(7)
BKC分解为v个SOC(Δj),可有多种分配方案,取(∑|Δj|)为最小者。κ揭示了机构基本回路变量之间的关联、依赖程度;κ越大,机构的运动学、动力学分析越复杂。
1.2.2节自由度计算中,已计算出上述3个回路的独立位移方程数分别为ξL1=ξL2=ξL3=6,因此,第1个回路的约束度Δ1,由式(6)得Δ1=8-2-6=0,表明:第1回路已构成BKC1,其耦合度κ1=0,其运动位置正解可直接求出。

因此,由第2、3回路构成BKC2,表明该BKC的位置正解须由第2、3回路联立求解才能求得,且只须设定一个虚拟变量。
总之,该机构包含BKC1、BKC2,其耦合度分别为κ1=0,κ2=1,且主动副分别分布在这两个不同的BKC内,因此,该机构具有运动部分解耦性,且机构的位置正解,可通过BKC1、BKC2依次逐一求得。
2 位置分析
2.1 基于序单开链的机构位置正解求解原理
由文献[15,18-19]可知,因任一机构可分解为若干个BKC,而每个BKC又可分解出约束度为正值、零、负值3种形式的单开链,因此,机构位置正解的求解,可转换为3种单开链的位置求解,而这3种单开链的约束特性及其建模方法为:

2.2 参数标注
为方便理解,建立图1机构运动学模型,如图2a所示,因冗余支链正常情况下处于随动状态,对机构的正常工作不起作用,因此,机构运动学分析时,可不考虑图2a中的冗余支链(即A5-B5-C5)。
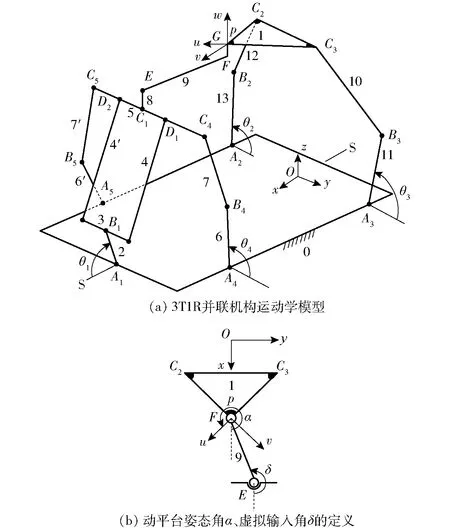
图2 3T1R并联机构运动学建模Fig.2 Kinematic modeling of 3T1R parallel mechanism
该机构静平台0为矩形,A1、A2、A3、A4分别表示位于静平台0上的4个转动副R11、R21、R31和R41的位置。在静平台上建立Oxyz坐标系,坐标系原点O位于A2和A3连线的中点,且x轴与R11的轴线相互垂直,y轴与R11的轴线相互平行,z轴由右手法则确定;而动平台1为等腰直角三角形,在动平台1上建立puvw坐标系,原点p位于直角边的交点上,u轴平行于C3点所在的直角边,v轴平行于C2点所在的直角边,w轴由右手法则确定。
设θ1、θ2、θ3、θ4分别为转动副R11、R21、R31、R41的输入角,其定义如图1所示;动平台姿态角α为u轴与x轴正向的夹角,而在位置正解求解时设定的虚拟输入变量δ(见2.3.2节)为杆9与x轴正向的夹角,如图2b所示。
该机构的结构参数为:动平台1直角边长为l3,主动杆A1B1=A2B2=A3B3=A4B4=l4(l4 正解问题可描述为:已知主动输入角θ1、θ2、θ3、θ4,求动平台1上p点的位置(x,y,z)及姿态角α。 2.3.1BKC1的位置求解 易求得点B1、B2、B3、B4的绝对坐标分别为:(2l1+l4cosθ1,0,l4sinθ1)、(0,-l2+l4cosθ2,l4sinθ2)、(0,l2+l4cosθ3,l4sinθ3)、(l1,l2+l4cosθ4,l4sinθ4)。 因BKC1的κ1=0,因此,输出杆5的位置(xC1,yC1,zC1)计算如下: 由式(3)可知,输出杆5的输出运动为2T,其运动始终位于yOz平面内,因此xC1=l1,即点C4的坐标为(l1,yC1+2l6,zC1)。 由杆长约束B1C1=B4C4=l5,有位置约束方程 (8) 两式相减得 HyC1+MzC1=N 若H=M=0,则N=-(xB1-l1)2=0,但由于l4 当H=0时 (9) 当H≠0时 (10) 其中 H=2(yB4-2l6)M=2(zB4-zB1) 2.3.2BKC2的位置求解 因BKC2的κ2=1,且包含2个回路,须联立求解如下: (1)在Δ2=1的回路{R12-R13-S23-S22-R21}上 设定虚拟输入角δ(图2b),则动平台p点的坐标为 (11) 在动坐标系puvw下,pC2、pC3的坐标分别为(0,-l3,0)、(-l3,0,0)。设动坐标系相对于静坐标系的旋转矩阵为 则可得到C2、C3在静坐标系中的坐标为 C2=R(z,α)pC2+p= (12) C3=R(z,α)pC3+p= (13) 由杆长约束B2C2=l5,建立约束方程 (14) 整理可得 J1sinα+P1cosα+Q1=0 (15) (2)在Δ3=-1<0的SOC3回路上建立约束方程 由{S33-S32-R31}上的杆长约束B3C3=l5,得 (16) 通过不断改变δ的值,可以使f(δ)→0,从而求得真实δ;再将δ的真实值代回式(11)、(15),即可得到动平台1的p点坐标及其姿态角α。 由式(11)知,x=φ(θ1,θ2,θ3,θ4)、y=f(θ1,θ2,θ3,θ4)、z=φ(θ1,θ4)、α=η(θ1,θ2,θ3,θ4),因此,该机构具有输入-输出(I-O)部分运动解耦性。 逆解问题为:已知动平台p的坐标(x,y,z)和姿态角α,求输入角θ1、θ2、θ3、θ4。 由杆长约束EF=l7,整理可得 (17) 因式(12)、(13)已求得点C2、C3的坐标,由杆长约束B1C1=B2C2=B3C3=B4C4=l5,有 (18) 由此可得 (19) 其中 由式(19)可知,输入角θ1、θ2、θ3、θ4均有两组解,通过排列组合,一共可以得到24=16组解,同时,C1点的坐标也存在两组解,所以,该机构一共有2×24=32组逆解。 2.5.1正解算例 设并联机构结构参数为l1=300 mm、l2=300 mm、l3=150 mm、l4=250 mm、l5=800 mm、l6=100 mm、l7=200 mm、l8=25 mm。 设4个输入角分别为θ1=37.23°、θ2=156.22°、θ3=57.18°、θ4=21.43°;θ1=62.83°、θ2=121.77°、θ3=72.43°、θ4=46.78°。 设虚拟输入角δ的范围为(0°,360°),采用一维搜索方法,分别求得两组实数正解,如表1所示。 表1 位置正解数值Tab.1 Numerical values of direct kinematics 2.5.2逆解算例 将表1中第Ⅰ组正解中序号1的数据,代入逆解(19),求得4个输入角分别为θ′1=37.230 8°、θ′2=156.222 7°、θ′3=57.181 2°、θ′4=21.428 6°。 所得数值与求解正解中给定的第Ⅰ组4个输入角一致;用表1中其余3组正解的数据,同样可得相同的输入角,因此,正解、逆解公式推导正确。 并联机构的可达工作空间,是指在考虑运动副转角范围(球副转角为±30°)、杆长不干涉情况下,末端执行器的工作区域,它是衡量并联机器人性能的一个重要指标。本文采用极限边界搜索法对该并联机构的工作空间进行分析,首先,根据杆长来设定工作空间的搜索范围,然后,基于位置逆解式(19),搜索所有满足约束条件的点,由这些点组成的三维图即为该并联机构的工作空间。 确定空间三维搜索范围为:600 mm≤z≤1 000 mm,-π≤θ≤π,0≤ρ≤800 mm,该搜索范围只需要略大于杆件的活动范围即可,通过Matlab软件编程,得到该并联机构的三维工作空间如图3所示;取不同z值时的x-y截面图,如图4所示。 图3 工作空间三维图Fig.3 Three dimensional workspace 由图4可得: (1)在z∈[600 mm,1 000 mm]范围内,工作空间截面连续,且随着z增加,截面面积在逐渐缩小。 (2)工作空间对称于x轴,且对称性好,这与其整体结构关于S-S线对称一致。 (3)由于杆5的运动始终位于yOz平面内,故动平台坐标原点p在x方向上的极限位置,只与杆9的杆长l7有关,故工作空间仅在x∈[100 mm,500 mm]上存在。 动平台转动能力指的是末端执行器在工作区域内的转角范围,是衡量并联机构输出转动灵活性的重要指标。本文仍采用与求解工作空间一样的极限边界搜索法,基于逆解式(19)分析某一固定z处该并联机构的转动能力。现取z=600 mm,通过Matlab软件求得该高度x-y截面内的转角α的范围,如图5所示。由图5可知,动平台在z=600 mm时,转角α的范围很大,能达到[-180°,180°]的区域面积为0.28 m2,约占总区域面积(0.41 m2)的68%,表明在该平面内,动平台具有较大的转动能力;其余不同z时各截面的转动能力求解与此相同,同样表明具有良好的转动能力,不再一一赘述。 图4 工作空间的x-y截面图Fig.4 x-y section of workspace 图5 z=600 mm时并联机构各点转角的分布Fig.5 Distribution of rotation angles of PM at z=600 mm 由图1可知,支链A、B和冗余支链C组成了一个子并联结构,其末端点C1的输出运动为2T且始终位于yOz平面内,所以只需分析支链C是否对点C1的运动范围存在约束,即可判定其是否对机构的工作空间和转动能力产生影响。 分别求解含/不含冗余支链时点C1的运动范围,如图6所示。 由图6可知,在加入冗余支链后,C1点的运动范围没有发生变化,所以该冗余支链对机构的工作空间和转动能力没有影响。 当机构处于奇异位置时,运动会出现分岔现象,此时机构的运动不具有确定性。因此,在并联机构的设计时,有必要对其可能存在的奇异位置进行分析。本文通过对位置逆解公式的求导得出雅可比矩阵,进一步分析矩阵来得到该并联机构可能存在的奇异位置。 JpV=Jqω (20) 其中 (21) 而 当雅可比矩阵的Jp和Jq中只要有一个矩阵的行列式为零,该机构就会出现奇异位置。据此,可将并联机构的奇异位置分为3类:输入奇异、输出奇异、综合奇异。 4.2.1输入奇异 此时,由det(Jq)=0,得Jq矩阵行列式的解的集合为 W=W1∪W2∪W3∪W4 (22) 式(22)包含以下4种情况: (1)W1=(zB1-zC1)l4cosθ1-(xB1-xC1)l4sinθ1=0,即杆2和平行四边形短边中点连线在Oxz面上的投影共线,如图7a所示。 (2)W2=(zB2-zC2)l4cosθ2-(yB2-yC2)l4sinθ2=0,即杆13和杆12在Oyz面上投影共线,如图7b所示。 (3)W3=(zB3-zC3)l4cosθ3-(yB3-yC3)l4sinθ3=0,即杆11和杆10在Oyz面上的投影共线,如图7c所示。 (4)W4=(zB4-zC4)l4cosθ4-(yB4-yC4)l4sinθ4=0,即杆6和杆7在Oyz面上的投影共线,在当前的杆长条件下不会出现这种情况,因此,这一种奇异位置不存在。 图7 输入奇异位置Fig.7 Input singularity 4.2.2输出奇异 为使det(Jp)=0,有以下3种情况: (1)两个向量线性相关 设ke1=e2(即e1、e2线性相关),此情形可导出3种奇异条件,由式(21)可得: 即平行四边形短边中点连线和杆12在Oyz平面上的投影平行,如图8a所示。 ②kv11=v21,即 即杆12和杆9在Oxy平面上的投影平行,如图8b所示。 ③kv14=v24,即 即杆12和动平台上球副S33所处的直角边在Oxy平面上的投影垂直,如图8b所示。 图8 输出奇异位置(1)Fig.8 Output singularity (1) 设ke3=e2(即e2、e3线性相关),此情形可导出两种奇异条件: 即杆12和杆10平行,如图9a所示。 ②kv34=v24,即 v21(sinα-cosα)=v22(sinα+cosα) 即动平台的转角为-45°且动平台斜边与x轴重合,如图9b所示。 图9 输出奇异位置(2)Fig.9 Output singularity(2) 两向量线性相关的其他组合分析与此类似,不再一一赘述。 (2)3个向量线性相关 设e2=k1e1+k2e4(k1k2≠0),则有 即平行四边形短边中点连线、杆12和杆6在Oyz平面上的投影不平行,如图10a所示。 ②k1v11+k2v41=v21,即 即杆12和杆9在Oxy平面上投影平行,如图10b所示。 ③k1v14+k2v44=v24,即 即杆12和动平台上球副S33所处的直角边在Oxy平面上的投影垂直,如图10b所示。 图10 输出奇异位置(3)Fig.10 Output singularity (3) 其余情况分析过程类似,不再一一赘述。 (3)4个向量线性相关 设e2=k1e1+k2e3+k3e4(k1k2k3≠0),结合前面两种情况的分析,此时,k1、k2、k3的值无法解出,此种情况不存在。 4.2.3综合奇异 此时,det(Jp)=det(Jq)=0,即输入奇异和输出奇异同时发生。例如,取输入奇异中的A2=0和输出奇异中的情况(2),就可以同时满足两个矩阵的行列式均为0,出现综合奇异,三维模型如图11所示。 图11 综合奇异位置Fig.11 Comprehensive singularity 从上述奇异位置的分析来看,并联机构的奇异位置,本质上表现为输入-输出关系的雅可比矩阵降秩,使末端执行器的自由度发生了变化。假设雅可比矩阵为一个n×n的方阵,那么当rank(Jp) 设一个非冗余机构的雅可比矩阵为J,当该机构出现奇异时,rank(J)=n-ξ 此时,若增加ξ个驱动支链,得到一个新的矩阵它为一个(n+ξ)×n的矩阵。该矩阵增加了ξ行非零行,此时,rank(J*)=n,即消除了机构的奇异位置。 (23) 一般来讲,增加冗余支链驱动的方法有两种,第1种方法是保持自由度不变,直接在并联机构上增加驱动单元,这种方法简单,但会使机构变得不对称,不利于机构整体的运动;第2种方法是在原并联机构的基础上,增加一条相同的支链,它并不影响自由度变化,这种方法不仅使并联机构对称、刚度和稳定性好,而且可避免奇异位置。本文采用第2种方法,增设一条冗余驱动支链{-R51-R52-R53-},其结构与其右边的{-R41-R42-R43-}完全一致,如图1、图4所示。 该机构原本的雅可比矩阵为一个4×4的方阵,通过上述奇异位置分析可知,当有两向量线性相关时,会发生奇异,使得rank(Jp)=3<4。但当加入这样一条冗余支链后,其雅可比矩阵变为5×4的矩阵,此时rank(Jp)=4,即该矩阵满秩,机构的奇异位置被消除了。因此,该并联机构增设左边的冗余驱动支链,可使机构的奇异位置消除,同时,提高了机构的刚度和稳定性。 式(18)的4个方程,可表示成唯一形式:f(x,y,z,α)=0,全微分后可得 (24) 对式(24)两边同时除以dt得 当机构不存在奇异位置时,Jp可逆,则 (25) 式(25)即为动平台原点p的速度正解公式。 取式(24)对时间t求导,可得 (26) 令 表示式(24)中Jp和Jq内各项元素对时间t的导数。 当机构不存在奇异位置时,Jp可逆,则 (27) 式(27)即为动平台原点p的加速度求解公式。 取4个主动臂的输入角运动规律分别为θ1=10°cost、θ2=-10°cost、θ3=10°cost、θ4=15°cost。 通过Matlab软件编程计算,得到动平台1的速度与加速度,分别如表2、3所示。 表2 动平台速度Tab.2 Velocity of moving platform 表3 动平台加速度Tab.3 Acceleration of moving platform 同时,将该并联机构的三维模型,通过Solid-Works导入到ADAMS软件中进行仿真,得到动平台的速度与加速度曲线,分别如图12、13所示。 图12 动平台速度Fig.12 Velocity curves of moving platform 图13 动平台加速度Fig.13 Acceleration curves of moving platform 通过分别对比表2和图12,以及表3和图13可以发现: (1)运用Matlab对式(24)~(27)进行编程计算得到的数值,与运用ADAMS仿真得到的曲线基本一致,从而验证了所推导的速度与加速度公式的正确性。 (2)该机构动平台的速度、加速度曲线,变化连续平稳、无突变峰值,具有较好的运动稳定性。 (1)揭示了4自由度3T1R并联机构的POC、自由度、耦合度、运动耦合性等主要拓扑特征,简化了其运动学分析过程,建立了该机构基于序单开链的仅含一个虚拟变量的位置正解求解方程,并用一维搜索方法求解了机构的位置正解。 (2)基于导出的逆解公式,得到了该机构的工作空间和转动能力,得知其工作空间连续且具有良好的对称性,且动平台具有较大的转动能力。 (3)得到了该机构可能存在的3种奇异位置及其出现的几何条件。2.3 位置正解求解


(l3sinα+x′,-l3cosα+y′,z′)T
(-l3cosα+x′,-l3sinα+y′,z′)T
2.4 位置逆解求解


2.5 位置正逆解的实例验算

3 工作空间和转动能力分析
3.1 工作空间分析

3.2 转动能力分析


3.3 冗余支链对工作空间和转动能力的影响
4 奇异位置分析
4.1 雅可比矩阵求解

4.2 奇异位置求解










4.3 冗余驱动支链消除奇异位置的说明
5 速度与加速度分析
5.1 速度公式推导

5.2 加速度公式推导
5.3 算例与仿真




6 结论
猜你喜欢
防爆电机(2022年1期)2022-02-16中学生数理化·中考版(2021年10期)2021-11-22农业机械学报(2021年10期)2021-11-09北京航空航天大学学报(2019年3期)2019-04-08电子制作(2019年23期)2019-02-23消费导刊(2018年8期)2018-05-25时代金融(2016年29期)2016-12-05商场现代化(2016年1期)2016-03-18燕山大学学报(2015年4期)2015-12-25中国人口·资源与环境(2015年1期)2015-01-13