
基于无人机图像分割的环太湖绿道景观空间视觉吸引特性研究
2019-06-18 06:03范榕
中国园林 2019年5期
范 榕
李卫正*
乌日汗
绿道是线性景观空间类型中的一种,其贯穿了多种景观空间形式和景观空间节点[1-2]。对于绿道的内涵,每个人的理解大相径庭。可从形式、内容、含义、地域性、时代性和不同使用人群需求的差异性方面进行理解[3],因此会出现各种类型的绿道形式。环湖绿道拥有更多的景观设计要素[4]并肩负使用功能,如各种形式的景观桥、堤岸、水生植物、船舫、水中艺术喷泉、建筑构筑物及其倒影等,都更加丰富了环湖绿道的内容。近几十年来,城镇规模不断扩大,围湖养殖和围湖造田等各种人类活动都对太湖区域的自然环境造成很大压力,冲击了生态系统的稳定性和完整性。同时,对太湖区域景观视觉资源也造成了严重的破坏,太湖因其规模、地理区位、独特的性状和对周边辐射范围较广,成为各学科选取研究的典型案例。本研究从风景园林学科特性出发,基于景观空间视觉吸引机制分析实践成果[5],针对环太湖绿道景观空间视觉吸引对人视觉及心理产生的影响[6]进行深入分析。以期解决环太湖绿道景观空间视觉资源日益遭受破坏和如何从视觉特性角度出发,解决环太湖绿道视觉资源有效提升等问题,为后期环太湖绿道的规划与建设提供依据。同时,环太湖绿道网络[7]的视觉管理建设也能促进环湖风景资源和旅游资源[8]整合,打造环太湖美丽城乡风貌区,满足环太湖区域居民生产、生活和游客休闲游憩、旅游观光、健身养生的需求[9-10]。
1 绿道景观视觉资源面临的问题
1.1 绿道景观空间视觉资源日益遭受破坏
绿道对改善城市形态、保护生态环境与景观品质具有非常重要的作用,也是生态城市建设领域的热点研究课题之一[11],因其具有廊道状特征,对于加强物种空间运动、维护生态系统平衡具有重要作用[12],同时由于绿道拥有极高的边缘/中心比率,较其他形态空间更易与周边产生密切关系。只有通过对空间格局的优化,才可以使同样面积大小的绿地空间产生更大的生态效益,提供更适宜、更多样的游憩、社会和景观价值。面对中国城市日益快速发展的现状,针对绿道景观空间格局发展不均衡以及特色风貌缺失等问题,迫切需要对绿道景观视觉资源进行理论研究。
1.2 绿道景观空间视觉吸引力不断衰减
绿道景观空间视觉吸引要素纷繁复杂,不同的视觉吸引要素相互组合都会呈现形态迥异的景观效果。目前各类绿道景观空间要素主要为植物,且种植形式和搭配模式缺乏有效的科学方法。随着绿道不断快速发展,视觉吸引要素也随之发生变化,许多自然环境型绿道正向建成环境型绿道方向发展。使得各地绿道景观空间特色逐渐缺失,越来越向程式化、模式化方向发展,产生视觉吸引力不断衰减的问题。只有在深入解析绿道景观空间吸引特性的基础上,才能有的放矢地在不同绿道段落空间中优化视觉吸引要素,针对性地提出提升视觉吸引力的研究方法,对绿道景观空间的规划与设计、视觉资源管理和视觉吸引力提升等方面有重要的实际意义。
2 研究工具及方法
2.1 研究工具
研究采用无人机航空摄影作为获取研究样本的工具。以环太湖绿道景观空间中各种类型的绿道空间为研究载体,课题研究人员于2017年1月22—23日携带2架DJI PHANTOM 4 PRO进行环太湖宜兴和无锡段无人机航空摄影与摄像,飞行海拔高度约100m。该无人机可承受的风速为8m/s,具有前视视觉系统水平60°,垂直±27°,后视视觉系统水平60°,垂直±27°,下视视觉系统前后70°,左右50°等功能,航拍使用GPS/GLONASS双模定位。无人机对每个分段进行抽样调查,每段选择2个典型区域,进行照片和视频信息的采集。拍摄每幅照片大小约2 000万像素,获取单张拍摄、多张连拍有效照片共计582张,进行后续的环湖绿道景观空间视觉效果比对分析。
2.2 研究方法
研究选用eCognition智能化影像分析作为课题研究的方法,目的是通过调配设定多种参数尺度来分割典型实验图像样本,以便从不同角度对实验图像样本进行深入理解。通过使用EXIF元数据编辑器软件提取出每幅照片的地理位置信息,借助面向对象的图像分割与分类软件eCognition进行图像景观要素的分割与提取。eCognition智能化影像分析是一种基于目标信息的遥感信息提取软件,主要采用决策专家系统支持的模糊分类算法,突破了单纯基于光谱信息进行影像分类的局限性,有效提高了高空间分辨率数据的自动识别精度,提出了面向对象的分类技术方法[13]。在对图像进行多尺度分割的基础上,针对不同图像的不同色彩、色调、形状、纹理和层次进行比对分析,遴选并归纳出具有不同特性[14]的环太湖绿道景观空间视觉吸引特性[15]。
3 研究实验分析
研究采用无人机作为获取航空摄影样本图像的工具,飞行高度设定约在100m,能从更高、更大的角度拍摄到人眼无法直接捕捉到的景观场景图像,是对人眼视角获取图像样本的有效补充手段。实验分析聚焦在对通过无人机获取的航空摄影图像的理解上,这和通过人视角捕捉到的图像具有相同的图像理解内涵。因此,在对景观空间的视觉感知方面,都是人作为研究主体对测试图像样本进行分析理解,而非无人机的视觉感知。
3.1 显著视觉吸引要素识别
绿道景观空间中特殊形体、色彩和显著要素[16]的提取是视觉吸引特性处理与解译的重要研究内容。首先,通过无人机对环太湖绿道沿线景观空间飞行摄影,对著名风景名胜区、景区和特殊景观空间进行有针对性的多角度重复拍摄,在复杂背景的景观空间底图下有效提取目标区域,用于高分辨率影像场景的快速视觉捕捉分析。然后采用图像分割法对采集样本进行视觉吸引要素的分割与提取,获得相似度高的视觉吸引要素图像区域。以重复率高和相似度近的区域来分析其显著性强弱,实验提取太湖贡山岛上的Club Med国际高端度假村作为视觉吸引目标,图片拍摄高度59.676m,纬度31°22′16.204″,经度120°19′29.666″。采用eCognition软件进行分析,发现在分割尺度250(图1),色彩0.7和平滑度0.5的参数下,图像背景中的大面积树林、红色标志物和前景中的建筑物都能具体清晰地分割出来,相对分割尺度500(图2),色彩0.7和平滑度0.5的参数图像分割的内容更为精细准确,通过图像分析法得出的结果与人眼对鲜艳色彩、大体量物体和具体实体物有相同的捕捉结果,表明在不同尺度下[17],这些显著的绿道景观空间视觉吸引要素不受尺度变化的影响,能将其自身具有的显著特征表现出来,所具备的突出特性就是视觉吸引要素显著性。
由于视觉对象和周围环境产生的明显对比和差异,刺激了人类视觉系统,形成了强烈的视觉反差。这通常是由于图像中不同的视觉要素而引起的变化,各要素之间对比反差越大,越容易吸引人眼的注意。如远离太湖绿道位于湖中贡山岛上的Club Med国际高端度假村,其凸显的红色标志物在绿树丛林的掩映中依然清晰可见,达到了宣传度假村吸引更多游客前来度假的目的,这个色彩吸引要素所在的区域被称之为显著区域。锁定显著区域,可以有效地提高人们搜索目标景物和处理各种视觉信息的效率。
3.2 不同视觉吸引要素本能捕捉

图1 250分割尺度下的图像分析

图2 500分割尺度下的图像分析
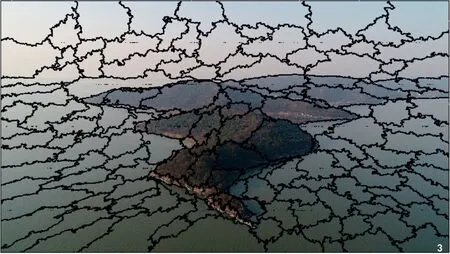
图3 300分割尺度下的图像分析

图4 950分割尺度下的图像分析
人们通常会对事先没有准备而突然映入眼帘的景观要素有着较为强烈的视觉刺激[18],尤其是对具有特殊形体、造型奇特、瞬间变幻或消逝、运动中的生物和闪烁的色彩会有本能的应激反应,同时将捕捉到的视觉吸引要素通过视觉系统传递给大脑进行选择性地筛选。无人机在环太湖绿道无锡段飞行时发现龙头渚风景区具有特殊形态的地形地貌,其具象的造型引起人们的视觉注意。实验在大量的拍摄照片中也选定该景观空间视觉吸引要素作为研究对象,在色彩0.7和平滑度0.5的相同参数下,分别选定分割尺度参数为300和950作为实验比对,发现在分割尺度300的参数下(图3),分割斑块较多,不仅包含对深入湖面中的尖形地形、山脊分成的两侧山体和蜿蜒曲折的外轮廓线的分析,还包括对阳光照射下水天一色的湖面和天空的色彩差别的详细分割。其精确的分割内容与人眼对绿道景观空间视觉吸引要素的细节感知有具体的定位选择对象。在分割尺度为950的参数下(图4),视觉吸引选择的内容相较于分割尺度为300的参数图像分析内容完整宏观。eCognition软件对深入湖面的尖形地形进行完整分割,天空和湖面的分界线也精准地分割出来,远处的山体依据阳光的光影变化独立分块。实验表明,在不同的分割尺度参数下所得出的绿道景观空间视觉吸引要素精细度与吸引物本身的形状轮廓边界、色彩变化和光影差异因素有着密切联系,当分割尺度值越高,相应地图像分割斑块内容也较为整体。当分割尺度值越低时,图像斑块随上述因素的影响分割更为具体、精确和细腻。
太湖绿道边视觉捕捉到的落日夕阳照应在湖面上,放出夺目光辉,成为人们视觉选择的对象。这时人们能迅速地将注意力聚焦在不断下落瞬逝变化的太阳要素上并进行分析和优先处理,感受湖边落日余晖的意境美,这种视觉吸引特性就是“选择性”。同样在太湖绿道边航拍到的龙头渚风景区,其地形地貌形似一条鳄鱼蜿蜒曲折地伸入湖中,独特的形状给不同的观赏者以多样的视觉形态联想,并成为视觉吸引的选择对象。选择性属于视觉吸引机制中的“由外而内”的“刺激应变”的吸引机制类型。
3.3 带有观赏任务的主动意识

图5 500分割尺度下的图像分析

图6 800分割尺度下的图像分析

图7 350分割尺度下的图像分析

图8 700分割尺度下的图像分析
在环太湖绿道无锡段的景观空间中,人们对灵山大佛风景区有着慕名前往观赏的心理,这一想法的产生主要来自灵山大佛风景区的宣传照片、人们的口口相传和对佛教文化的虔诚心理等,尤其是直观的视觉形象感知,这些都能使人们产生前往游赏的主动意识。同样,研究者在实验测试中也将这一著名景点作为典型的研究对象,摄影角度选取以大佛为中轴线的宏观尺度和聚焦大佛本身的中观尺度。由于灵山大佛通高88m,为能获得较好的视觉效果,全貌瞻仰或观赏时都必须保持一定的距离。在参数色彩0.7和平滑度0.5不变的条件下,选定分割尺度为500的参数对完整的风景区进行图像分析(图5),实验发现分割的要素能准确地将中轴线上的前景圆形广场、中景方形广场和红色区域的建筑物以及远景的佛像分割出来,同时也依据色彩、光影和平滑度将轴线两侧的各类建筑物等附属设施分割出来。在分割尺度为800的参数下(图6),能精确地对佛像台基、佛身和背景进行图像分割。实验表明,500和800分割参数的选取符合带有视觉吸引任务的观赏目标,和人们在不同视域尺度下对积极主动观赏的景观空间视觉吸引要素对象具有相同性。
人们对环太湖绿道无锡段中滨湖区马山国家风景名胜区山水之间里的灵山大佛及其造型有着深刻的记忆。灵山大佛佛体坐落于无锡马山秦履峰南侧,是世界著名景点,也是无锡的城市标志之一,对当地的社会文化和经济发展具有重大意义。人们对大佛的建造过程、悠久的历史、文化价值、大佛的特点、保护和特色景点等都有或多或少的认识,这些都是在人们脑海中已形成的视觉感知,人们带有这些初步的感知后会产生积极向往游赏的动机,这就是灵山大佛景区作为环太湖绿道景观空间中典型的具有视觉吸引积极主动性的景观空间类型。
3.4 高品质空间多次重游
环太湖绿道景观空间是连接城市与城市、城市与乡村之间重要的组成部分,其品质的高低不仅对生态环境质量有着巨大影响,同时也对使用者的行为意识、出行方式、公共健康、生活质量以及城市名片的打造也起到积极的促进作用。高品质的绿道景观空间可吸引观赏者长时间停留,还可以给人们留下深刻的印象,增强多次重游的意识,提高绿道的反复观赏性和使用率。
无人机在无锡段进行航空摄影时对环太湖绿道一段湿地景观空间进行多次拍摄,拍摄按照车行道路的前进方向进行摄影,但由于该地段湿地景观空间品质较高,有丰富的可游可赏的价值内容,无人机又按照指令反向调头进行多角度重复拍摄。研究对采集到的图片数据首先进行视觉吸引的初级特征提取,每种类型的特征通过视觉捕捉后传递给大脑进行加工融合,形成具有综合性的视觉吸引特征内容,其综合性越强融合度越高,相对该景观空间具有高品质的视觉吸引质量。实验图7、8在同一视角下将分割图像参数均设为色彩0.7和平滑度0.5,在分割尺度为350的图像里近景中的外露水面的水草斑块和浅水草斑块都能分割出来,中景处连绵的湿地斑块划分较细,而分割尺度为700的各类景观区域则相对完整。表明视觉吸引对高品质绿道景观空间关注的细节更多,有更多的内容去欣赏,从而产生再次重游的概率相应更高。
4 绿道景观空间视觉吸引特性
4.1 绿道景观空间视觉吸引特性模型
在环太湖绿道景观空间中,首先呈现在人们面前的是绿道景观空间中的各类植被、线性空间形式、绿道铺装材质、色彩、方向、距离、构筑物的形状和大小等景观要素,然后人类的视觉系统开始对这些景观要素发生视觉吸引行为,对被人眼视觉系统所吸引到的景观视觉吸引要素进行提取、传输、加工和处理,在这一过程中,视觉吸引特性才开始工作。将4种特性根据不同景观空间景象和不同人群的视觉感受偏好进行多种形式的排列重组搭配[19]。如人身处某些景观空间中既对该景观空间具有的显著性有视觉吸引特性偏好,同时又有积极性的视觉吸引特性偏好,甚至同时具有3种甚至4种视觉吸引特性。这些视觉吸引特性相互作用都成为视觉系统中的视觉吸引焦点所在,进而将视觉系统将筛选过的信息传输给大脑视觉中枢,进行更进一步的细节分析,有助于人们对景观空间视觉吸引要素细节的关注和体会,对环湖绿道景观空间里呈现的景观景象有更为深刻的视觉记忆。
4.2 绿道景观空间视觉吸引特性分析
4.2.1 显著性
在一个空间场景内,场景中的一些内容引起了人们的注意,这就是显著现象。当人们身处一个未知的自然环境中,视觉系统在扫描自然环境的同时,注意力会本能地倾向并聚焦于一些与周围环境有明显差异的区域,对这些区域有突出的反应,这种特性就是显著性[20]。心理学研究表明,人类在观察周围环境时,往往由于个体行为的需求或局部景象包含的信息线索,会将注意力有选择地集中在某个或某些景物上,尤其该场景内容能给人们的视觉带来特异或强烈刺激的事物时,更容易引发视觉吸引行为。从而选择一定的点或者区域作为景观的“标识”,并在大脑视觉中枢里对视觉信息进行加工处理,这是在视觉环境中感知突兀区域的一种能力。
4.2.2 选择性
视觉吸引的选择性是人类视觉最显著的特点之一,也是处理景观空间中各种信息的关键步骤。人眼对外界信息的接收、提取、加工和重组都是基于人眼对信息的选择[21]。它在一个时间段内会选择相关内容和刺激信号进行集中处理,具有排除其他无用信号的调节能力,是人类视觉系统中非常重要的一项技能,称为视觉选择性。视觉所注视的内容则是选择的焦点,视觉吸引的选择性是基于对景观要素视觉感知过程中重要的一步,也是人对各类景观空间视觉吸引的重要组成部分,人不能对所感受到的景观空间内要素进行选择性地提取,就不能感受到该景观空间给人们带来美的享受。因为视觉美感是主观的,也是因人而异的。

表1 绿道景观空间视觉吸引特性
4.2.3 积极性
人们在不同类型的绿道景观空间中,或多或少地带有欣赏目的去找寻一些著名景点和自己感兴趣的景观要素,这是典型的由大脑控制的带有视觉搜索任务的视觉吸引机制类型,即“由内而外”的“目标追踪”,这依赖于大脑指令的视觉吸引任务,具有主观意识的能动性。人们在前往太湖景区旅游度假前,往往会对环太湖区域的著名景点做足游赏攻略,对某些标志性建筑物、构筑物、特色景点风貌和显著性地标记于心中,当到达该景观空间后会积极主动地去寻找这些景点进行观赏留念,这就是绿道景观空间视觉吸引特性中的主动性。
4.2.4 反复性
人们对自己偏好的绿道景观空间视觉吸引要素会发生选择、快速捕捉、凝视、主观性强等积极反应行为,同时还会伴随反复观赏的行为。人们会从多角度进行观赏,即将离开时也会多次回头张望,甚至在离开该景观空间后仍会产生再次或多次前往重游的反复心理。其产生的反复心理和发生的行为频率越多,表明该绿道景观空间环境质量越高,吸引力越大,反复游览线越强,不断呈正向循环发展。反复性是景观空间视觉吸引机制中“由内而外”的“目标追踪”和“内外融合”的“记忆再现”2种机制类型(表1)。
5 结语
本文对环太湖绿道景观空间视觉吸引要素特性进行了实验分析。使用无人机航拍工具采集图像样本,在研究方法上采用eCognition智能化影像分析样本。通过对不同分割尺度下的图像所分割的内容进行比对发现,在环湖绿道景观空间中,人类视觉感受和使用软件图片分析结果具有高度的相似性。研究选用的无人机航空摄影图像分割分析结果不能完全代替人视角捕捉到的景观空间视觉感受,但将无人机航空摄影到人眼视角不能触及的区域和角度获取研究图像,是辅助研究者对大尺度景观空间的图像理解、对景观空间规划与设计的思考和解决视觉资源管理上现存问题的手段之一。这犹如虚拟VR现实技术一样,不能完全替代真实的现实场景,但在视觉感知方面存在一定的研究价值,并将一步步深入推进探究。
绿道景观空间视觉吸引特性模型的构建可以更为直观地表现出人的大脑中呈现的景观景象是通过视觉中枢系统与外界客观景物的综合作用的过程,并产生与景观空间视觉吸引机制紧密相连的显著性、选择性、积极性和反复性。影响人们视觉感受偏好的因素较为复杂,但所讨论的环太湖绿道景观空间视觉吸引所具有的4种特性仍能为提升环湖绿道景观视觉质量之用,是评定及鉴赏景观品质的一种方法载体。
由于景观欣赏具有较强的艺术性和主观性,又较为明显地受到个体差异的影响,所以景观空间视觉质量评价要运用到实际的项目客体上,除了对欣赏者进行调研访谈外,还需要深入剖析人类视觉系统工作的基本原理和具有的生理、心理特性来共同认识和理解景观内涵。本文提出的特性是在已有的景观空间视觉吸引概念的提出、吸引机制类型、工作原理和吸引模式等研究基础上的继续深入,目的是更为科学、客观地进行景观审美评价,并为后期的环湖绿道景观空间视觉资源管理提供指导原则。
注:文中图片均由作者拍摄或绘制。
猜你喜欢
湖州师范学院学报(2022年9期)2022-11-09
华人时刊(2022年13期)2022-10-27
少儿美术(2021年2期)2021-04-26
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
先锋(2019年3期)2019-04-12
动漫星空(兴趣百科)(2018年11期)2018-10-29
四川党的建设(2018年8期)2018-04-25
太空探索(2016年5期)2016-07-12
体育科技(2016年2期)2016-02-28
金融经济(2015年16期)2015-08-21
