
基于车辆异常行为的套牌车并行检测方法
2019-07-01 02:35康晨傲曾献辉
智能计算机与应用 2019年3期
康晨傲 曾献辉

摘 要:面对套牌车问题,当前检测技术误判率居高不下,稽查部门需要消耗大量人力资源审核检测结果。为了降低套牌车检测的误判率和虚警率,提出了一种基于车辆异常行为的套牌车并行检测方法。确立数种与套牌车相关联的车辆异常行为因素,针对海量通行数据,利用分布式架构建立相应异常行为的挖掘算法模型,并对某市高速公路的真实海量交通流数据进行挖掘;利用BP神经网络算法建立模型并对数种异常行为挖掘结果进行训练,从而综合考虑多种异常行为因素得出套牌车检测结果。研究结果表明,该并行检测算法有效地降低套牌车误判率至18%,可大幅度提高稽查人员的工作效率。
关键词: 套牌车检测;车辆异常行为;大数据;并行;Spark;高速公路
文章编号: 2095-2163(2019)03-0011-06 中图分类号: TP391 文献标志码: A
0 引 言
套牌车是指不法分子伪造和非法套取真牌车的号牌,使非法车辆在表面披上了“合法”的外衣。近年来,随着人们生活水平日益增高,机动车的数量日渐普及,为了逃避税费、逃避交通违法或处理查究、走私、拼装、报废和盗抢来的车辆等,套牌车这类违法现象也在不时发生。严重影响了正常的交通秩序,同时更侵犯了他人的合法权益,成为了交通治安管理中的突出问题,难点问题[1-2]。
目前,有关套牌车检测技术方面的主要研究有以下几类:
文献[3]对机动车车牌和牌照框进行了改造,以方便交警辨别套牌车。但这也使得车牌的制造和丢失后的重制成本大大提高。文献[4-5]分别运用RFID和ZigBee技术将车辆信息进行加密存入电子标签中,并将电子标签植入机动车。但这类方法面临着车主的支持、政府的大量资金投资和推广、电子标签的篡改和伪造等诸多问题。文献[6-7]介绍了基于视频图像识别技术的车脸识别套牌车检测技术。但这类方法在识别同色同型号的套牌车、光线不佳、天气恶劣等情况时,识别率的表现不佳。迄至目前,以卡口时间对比法为代表的软件套牌车检测技术因其成本低、且实效性强的优势被广泛使用。文献[8]提出了一种基于网格化监控的套牌车检测系统,按照一辆车不可能“同时”出现在2个地点的原理,自动完成套牌检测。文献[9-10]提出了基于MapReduce的并行式套牌车检测模型,解决大规模数据下的套牌车检测问题。文献[11]提出一种基于历史车牌识别数据集的套牌车并行检测方法TP-Finder。文献[12]提出了动态速度阈值的套牌车检测方法。
而随着图像识别技术、传感器技术、视频监控设备等信息采集、识别技术的发展和普及,使得人们可以通过各类采集设备获得多维的海量交通数据存入到数据库中[13]。据统计,就国内某市高速公路的交通数据采集来说,每月就要存储超过100 G的数据。如何基于这样的大规模车辆通行数据,尽可能准确地检测出套牌车成为了一个关键的挑战,而利用分布式架构的并行计算就成为了首选手段[13-15]。
虽然当前在针对海量交通数据的并行式处理技术方面已有一些研究成果,但在套牌车检测方面仍存在较高的误判率(把正常车辆或者超速车辆等误归为套牌车),稽查部门需要将大量的警力消耗在对于检测结果的人工审核和确认上。针对当前套牌车检测技术误判率、虚警率较高这个问题,本文提出了一种基于车辆异常行为的套牌车并行检测方法。研究时,首先确立数种与套牌车相关联的车辆异常行为因素,利用分布式架构建立相应异常行为的挖掘算法模型,并对海量交通流数据进行挖掘。利用BP神经网络算法建立模型,再对数种异常行为挖掘结果进行训练,从而综合考虑多种异常行为因素得出套牌车检测结果,以达到降低误判率的效果。
1 套牌车相关的车辆异常行为确立
1.1 车辆速度异常
正常车辆在较短的时间内行驶的距离应该在一个合理的阈值范围内,如果在较短时间内车辆行驶了远远超出阈值的距离,即发生了该车辆“同时”出现在了2个地方的时空矛盾现象,则该车辆可能出现套牌现象。
1.2 车辆出入异常
如果车辆在某一时刻出(进入)高速公路,而在该车牌号的车辆未进入(出)高速公路的情况下,又发现相同车牌号的车辆不久后在任意出入站点再次出(进入)高速公路。该车牌号的车辆连续多次出(入)高速公路,则该车辆可能出现套牌现象。
1.3 车辆频繁出现异常
如果车辆被套牌,在一定时间内因其会频繁经过拍摄卡口,其车牌号被记录在车流量大数据中的概率必然增加。因此可以针对某段时间内在车辆流大数据中出现频率较高的车牌号进行挖掘。
2 车辆异常行为挖掘模型建立
本文在Spark分布式计算框架上,进行车辆异常行为挖掘模型的搭建。并选取某市高速公路的车流量数据作为数据集,车流量数据记录了车辆每次经过各拍摄卡口时所被记录下的车辆信息,包括:车牌号(license)、拍摄时间(time)、拍摄卡口ID(id)、车辆行驶方向(direction)。对此拟展開研究论述如下。
2.1 Spark分布式计算框架
Spark是一种通用而且高效的分布式内存计算框架,这是基于内存的计算方式,能有效提高在大数据环境下的计算效率,同时保证高容错性和高可伸缩性。Spark采用master-slave结构,主节点上运行名称为Master的守护进程,负责对整个集群的监控和任务分配,从节点上运行名称为Worker的守护进程,接收来自主节点的任务并交由该结点上的 Executor执行该任务。
弹性分布式数据集(RDD)是Spark的核心数据结构,RDD内部的数据集合在逻辑和物理上都被划分成多个子集合,这样的每一个子集合将其称为分区(partitions),每一个分区数值的计算都是在一个单独的任务中进行,因此并行任务的个数,也是由RDD分区的个数所决定。
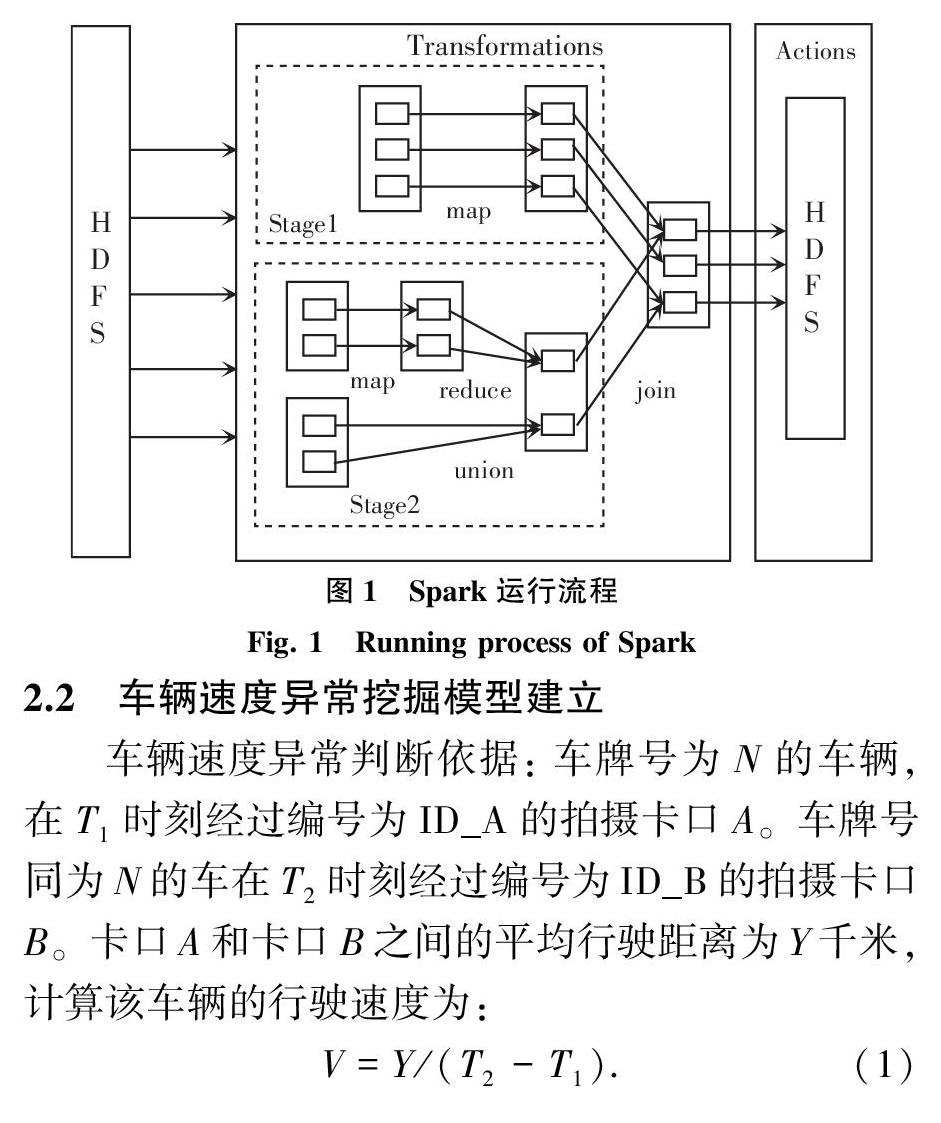
Spark程序是由对RDD的操作构成的,如读取文件是一个RDD,对文件计算是一个RDD,结果集也是一个RDD。程序先通过输入数据创建出一系列RDD;再使用转化(Transformation)操作对一个RDD进行计算后,将其转化成另外一个RDD,然后这个RDD又可以进行下一次转化;最后使用行动操作(Action)对RDD计算出一个结果,并把结果存储到外部存储系统(比如HDFS、ORACLE等)中,运行流程如图1所示。
2.2 车辆速度异常挖掘模型建立
车辆速度异常判断依據:车牌号为N的车辆,在T1时刻经过编号为ID_A的拍摄卡口A。车牌号同为N的车在T2时刻经过编号为ID_B的拍摄卡口B。卡口A和卡口B之间的平均行驶距离为Y千米,计算该车辆的行驶速度为:
设置车辆速度最大阈值为Vmax。若V≤Vmax,则说明该车辆从A卡口行驶到B卡口是符合正常情况的;但若V≥Vmax,车速已超过最大阈值,则说明该车辆不可能在T2 -T1的时间内从卡口A行驶到卡口B。
例如,车牌号为浙AB1234车辆的部分车辆行驶记录如图2所示,该车辆于08点00分经过拍摄卡口1011处,又于08点15分经过拍摄卡口1018处,经查询得两拍摄卡口之间的平均行驶距离为50 km,设置的阈值速度Vmax为140 km/h。根据公式(1)计算得该车辆的行驶速度V=200 km/h,超出阈值速度,则该车辆出现车辆速度异常现象。
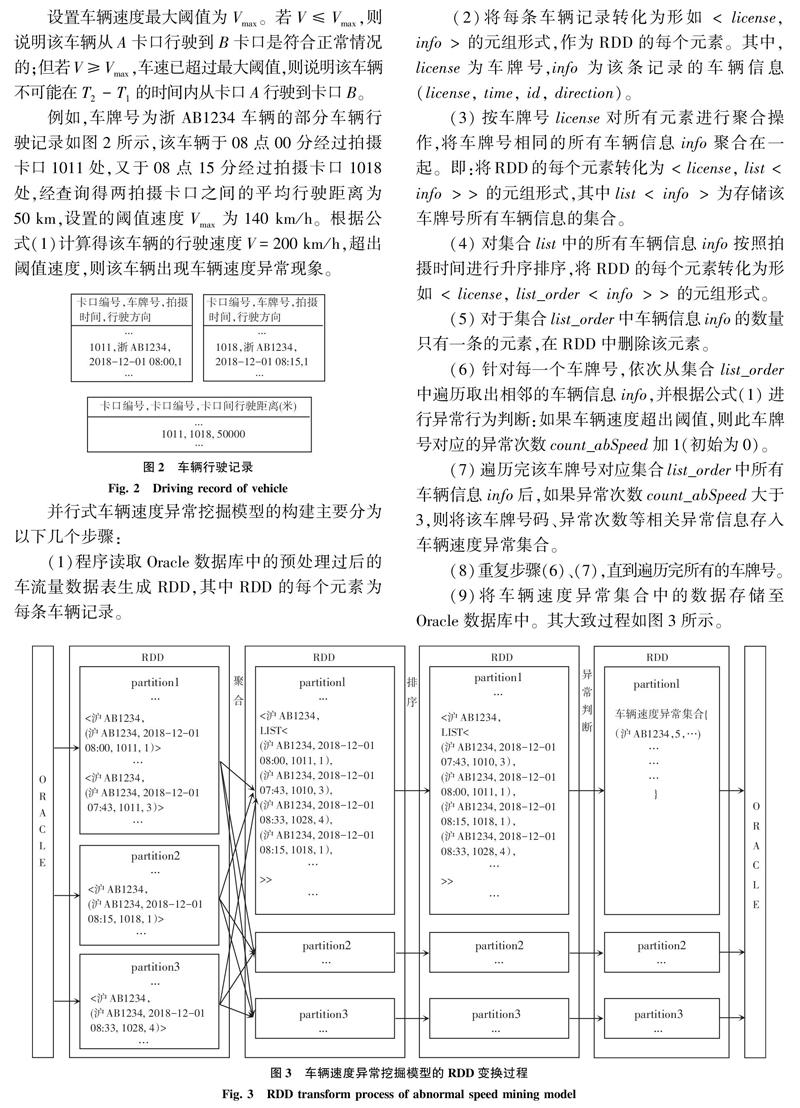
并行式车辆速度异常挖掘模型的构建主要分为以下几个步骤:
(1)程序读取Oracle数据库中的预处理过后的车流量数据表生成RDD,其中RDD的每个元素为每条车辆记录。
(2)将每条车辆记录转化为形如
(3)按车牌号license对所有元素进行聚合操作,将车牌号相同的所有车辆信息info聚合在一起。即:将RDD的每个元素转化为
(4)对集合list中的所有车辆信息info按照拍摄时间进行升序排序,将RDD的每个元素转化为形如
(5)对于集合list_order中车辆信息info的数量只有一条的元素,在RDD中删除该元素。
(6)针对每一个车牌号,依次从集合list_order中遍历取出相邻的车辆信息info,并根据公式(1)进行异常行为判断:如果车辆速度超出阈值,则此车牌号对应的异常次数count_abSpeed加1(初始为0)。
(7)遍历完该车牌号对应集合list_order中所有车辆信息info后,如果异常次数count_abSpeed大于3,则将该车牌号码、异常次数等相关异常信息存入车辆速度异常集合。
(8)重复步骤(6)、(7),直到遍历完所有的车牌号。
(9)将车辆速度异常集合中的数据存储至Oracle数据库中。其大致过程如图3所示。
2.3 车辆出入异常挖掘模型建立
并行式车辆出入异常挖掘模型的构建主要分为以下几个步骤:
步骤(1)~步骤(5)与2.2节相同。
(6)删除车辆信息info中车辆行驶方向为1或者2的info,仅保留为3和4的info。车辆行驶方向的含义见表1。
(7)针对每一个车牌号license,依次从集合list_order中遍历取出相邻车辆信息info中车辆行驶方向direction和拍摄时间time。当相邻车辆信息中车辆行驶方向同为3或者4,且时间差在1 h内时,将此车牌号对应的异常次数count_abInout加1。
(8)遍历完该车牌号对应集合list_order中所有车辆信息info后,如果异常次数count_abInout大于5,将该车牌号码、异常次数等相关异常信息存入车辆出入异常集合。
(9)重复步骤(7)、(8),直到遍历完所有的车牌号。
(10)将车辆出入异常集合中的数据存储至Oracle数据库中。
2.4 车辆频繁出现异常挖掘模型建立
并行式车辆频繁出现异常挖掘模型的构建主要分为以下几个步骤:
(1)程序读取Oracle数据库中的预处理过后的车流量数据表,生成RDD。
(2)将每条车辆记录转换为
(3)按车牌号license和拍摄日期date对所有元素进行聚合等操作,将RDD的每个元素转化为
(4)将RDD的元素按frequency进行降序排序,并选取frequency排名前10%的车牌号,即一天内出现频率最高的10%的车辆。
(5)将步骤(4)中选出的车牌号的各天出现次数进行累加,得到
3 结果与分析
3.1 实验环境与数据集
本文的实验环境部署在由4台4核8 GB内存的服务器组成的Spark集群环境上。选取其中一台作为Master节点,其他三台作为Work节点。各节点的软件部署见表2。
3.2 数据集预处理
本文研究采用实验数据集为,某市高速公路2018年12月约800个拍摄卡口所录入的真实车辆流数据以及各拍摄卡口信息。数据已经过脱敏处理,车辆流数据规模约在9 000W条。
各拍摄卡口传输的数据通常含有属性冗余特征,各种天气因素环境因素、车速过快等,也会引起拍摄时的数据缺失、数据异常、属性不完整等问题。因此在使用数据前,需要进行冗余属性剪枝、异常数据剔除、缺失属性补全等操作。预处理过后的数据集存入Oracle数据库中。
车流量数据记录了车辆每次经过各拍摄卡口时被记录下的车辆信息,选取12月1日~15日的数据集,经过预处理过后得到的部分车流量数据表P1见表3。通过拍摄卡口信息可以查询到各个拍摄卡口之间的行驶距离等信息,经过预处理过后得到的部分拍摄卡口距离索引表P2见表4。
3.3 预测结果分析
本文采用第2节建立的3种车辆异常行为挖掘模型,在Spark分布式计算框架上对数据集P1进行数据挖掘。将高速公路12月警方真实稽查到的套牌车名单作为标签属性,与异常挖掘结果构成数据集P3,部分数据集见表5。
使用Spark的MLlib组件构建BP神经网络模型,设置模型的输入层节点数为3,中间层节点数为4,输出层节点数为2,传递函数为ReLU函数。选取数据集P3作为模型的数据集,并将数据集P3进行归一化操作。为了增强模型的泛化能力,选取数据集中70%作为训练集,15%作为验证集,15%作为测试集。
待模型经训练完成后,选取P3测试集和P3全量数据集进行测试。为了提高稽查部门的效率,每半个月向稽查部门提交200名最可疑的套牌车辆名单,即分别选取测试结果中归类为套牌车的前30位、140位进行验证(按车辆速度异常次数的降序排序),对于全量集准确率约为93%,测试集准确率约为81%。
为了进一步验证算法性能,本文选取传统的卡口时间对比法进行对比实验,该方法认为同一个车牌不能在短时间内出现在2个距离较远的位置,运用最大速度不可达算法对卡口历史监测数据进行处理,从而检测套牌车。选取12月15日~30日的车流量数据集,采用2种方法分别对5天、10天、15天的数据量进行测试,选取测试结果中归为套牌车的前70位、130位、200位(按车辆速度异常次数的降序排序)作为最终结果,对比试验结果见表6。
由此可见,与仅用卡口时间对比这单一手段检测套牌车相比,本文方法考虑了多种异常因素,将误判率降至约18%左右,能更有效地降低套牌车检测的虚警率。另外,高速公路上大部分套牌车辆一般为有目的性的长期作案,随着数据量的增多也能更好地提高检测效果。而有效的学习能力使本文方法具有较好的适应性,对提升高速公路稽查水平具有很大帮助。
4 结束语
针对当前对于海量交通数据的套牌车检测技术误判率高的问题,本文提出了一种基于车辆异常行为的套牌车并行检测方法。与传统方法相比,本文提出的方法借助分布式架构,实现了对海量数据的挖掘。并建立多种相应异常行为挖掘模型,考虑多种异常行为因素,以求达到降低误判率的效果。最后通过实际数据验证方法的有效性,从预测结果中得出,本文所提出的算法对于套牌车检测的误判率降低有着不错的效果,对于降低了稽查部门工作强度,减少了大量人力审核资源方面,取得了令人满意的效果。
不过,本文提出的方法还有一定欠缺。在套牌车判定过程中,对于阈值(速度阈值、各异常次数阈值等)的选择可能会对结果造成不小的影响,在后续研究中,将考虑采用机器学习方面的算法来解决动态阈值方面的问题,提高算法的适应性能力。
参考文献
[1]徐鑫华. 浅谈“套牌车”产生的原因、危害及对策[J]. 安全与健康,2007(10):22-23.
[2] 陈媛媛. 浅析套牌车辆的危害及整治对策[J]. 安全生产与监督,2010(3):44-45.
[3]唐晓东. 套牌机动车辆检测方法分析[J]. 中国人民公安大学学报(自然科学版), 2013, 19(2):76-79.
[4] 黄银龙,王占斌,徐旭,等. 基于ISO/IEC18000-6B标准的RFID车卡防伪问题研究[J]. 中国电子商情(RFID技术与应用),2008(5):39-42.
[5] 杨博. 物联网ZigBee技术在套牌车监管中的应用研究[J]. 制造业自动化,2012,34(17):41-43.
[6] 黄小龙. 基于卡口车辆特征信息表达方法及其在车辆图像智能分析系统中的应用实现[D]. 广州:中山大学,2016.
[7] 笪东旭. 基于车脸识别的套牌车检测方法研究[D]. 西安:西安电子科技大学,2013.
[8] 卢晓春,周欣,蒋欣荣,等. 基于网格化监控的套牌车检测系统[J]. 计算机应用,2009,29(10):2847-2848.
[9] 俞东进, 平利强, 李万清,等. 一种基于 Hadoop 的套牌车识别方法:中国 CN104035954A[P]. 2014-09-10.
[10]王涛,王顺,沈益民. 交通流大数据中的套牌车并行检测算法[J]. 湖北工程学院学报,2014,34(6): 29-32.
[11]李悅. 大规模数据集关联关系并行发现与优化方法研究[D]. 北京:北方工业大学,2016.
[12]莫迪. 基于大数据分析的套牌实时检测系统研究与实现[D]. 上海: 东华大学,2017.
[13]姬倩倩. 公共交通大数据平台架构服务模式研究[D]. 西安:西安电子科技大学,2014.
[14]ITS. National intelligent transportation systems program plan: A ten-year vision[Z]. USA: The Intelligent Transportation Society of America and U.S. Department of Transportation,2002.
[15]SUNDERAM V S. Current trends in high performance parallel and distributed computing[C]// 7th International Parallel and Distributed Processing Symposium (IPDPS 2003). Nice, France:dblp, 2003:1.
[16]ZHU Tongyu, YU Jianjun, DU Bowen. RTIC-C: A cloud computing platform for history data mining of traffic information[C]// 2012 International Conference on Connected Vehicles and Expo (ICCVE). Beijing,China:IEEE, 2012:282-283.
猜你喜欢
西部交通科技(2022年2期)2022-04-27
散文诗世界(2022年1期)2022-01-13
小学阅读指南·低年级版(2017年11期)2017-12-06
新闻世界(2016年10期)2016-10-11
科技视界(2016年20期)2016-09-29
中国记者(2016年6期)2016-08-26
文学少年(小学版)(2009年1期)2009-01-22
