基于滑模观测器的永磁同步电机无传感器控制
2019-08-17 03:04赵仙花刘豪睿高兴超
时代农机 2019年5期
赵仙花,刘豪睿,高兴超
(德州学院 汽车工程学院,山东 德州253023)
1 引言
永磁同步电动机(PermanentMagnetSynchronousMotor,PMSM)具有结构简单、运行可靠、体积小、质量轻、损耗少、效率和功率密度高等优点,被广泛用于高性能调速系统中。目前实现高动态性能永磁同步电机控制的两种主流控制策略是矢量控制和直接转矩控制,在采用磁场定向的矢量控制时,为了实现高性能的三相PMSM控制系统,一般需要获得准确的转子位置和转速信息,但机械传感器的安装使用会增加系统成本、尺寸和重量,并对使用环境有比较严格的要求。而无传感器控制技术则通过检测电机绕组中的有关电信号,采用一定的控制算法即可实现转子位置和速度估算,代表了PMSM无传感器控制系统的发展方向。目前常用的控制算法有滑模观测器算法、模型参考自适应控制算法、扩展卡尔曼滤波器算法等。其中滑模观测器的方法由于滑动模态可进行设计,并且与被控制系统参数和外部扰动无关,对内部参数摄动和外部干扰具有较强的鲁棒性和较高的控制精度,具有结构简单,易于实现等优点。因此,滑模控制技术受到各国学者关注而得到了广泛应用,在电机控制领域应用研究越来越受到重视,是一种发展前景较好的无位置传感器电机控制方法。
我们采用一种连续函数υ(x)代替符号函数sign(x)设计滑模观测器的方法与传统的设计方法相似,仅仅是改变了传统的切换函数,但与传统滑模观测器相比,这种新方法不仅有效抑制了抖振的影响,而且可以省略低通滤波器和相角补偿,提高了滑模SMO的控制性能。
2 永磁同步电机数学模型
永磁同步电机在静止坐标系α—β下的电流方程
其中反电动势方程:

式中:
iα、iβ—定子电流 α-β轴分量
uα、uβ—定子电压 α-β 轴分量
eα、eβ—反电动势 α-β轴分量
Ls、Rs—定子电感和电阻
ψf—永磁体磁链
ω—电机电角速度
θ—电机转子角位置
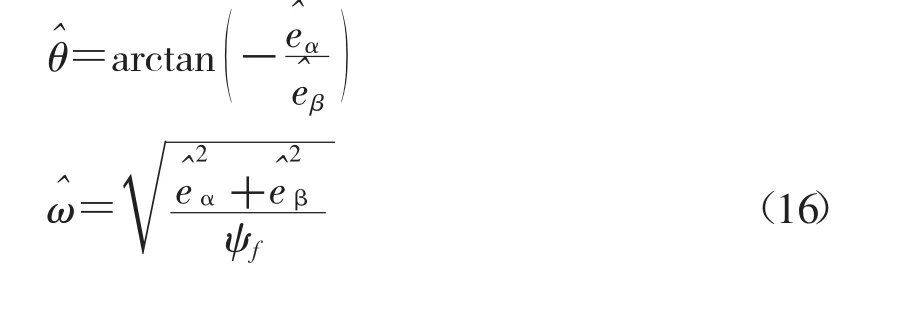
由式(2)可得电机转子位置和转速,其表达式为:

由式(3)和(4)可知,永磁同步电机的转子位置和转速与其反电动势有关,因此可以通过滑模观测器估算反电动势信号就能获得所需的转子位置和转速,从而实现电机的无传感器控制。
3 滑模观测器的设计
永磁同步电机传统的滑模电流观测器在α-β坐标系下的方程:
式中:
uα、uβ—α-β 轴观测器的控制输入量
由(5)式减去(1)式得定子电流偏差方程:
式中:
通常滑模控制器的设计分为两部分:(1)选择合理的滑模面;(2)设计控制律。使得系统轨迹在控制律的作用下趋近滑模面。
根据电机电流方程和滑模变结构理论,定义滑模面为:

定义滑模切换面为:

滑模控制函数采用连续函数υ(x)代替符号函数sign(x):

其中:δ为很小的正常数。
设计控制律为:
稳定性证明:
对(10)求导得:.

得到滑模存在的条件:

将(12)带入(9)进一步推到可得滑模存在的条件:
k>max(|eα|,|eβ|) (13)
在一定时间内运动点到达滑模面饼在滑模面上运动时,滑模面上的点满足条件:

将(14)带入(6)得:

由反电动势表达式(15)可计算出转子的位置和速度:
4 仿真实验与分析
基于SMO的三相PMSM无传感器控制框图如图1所示。
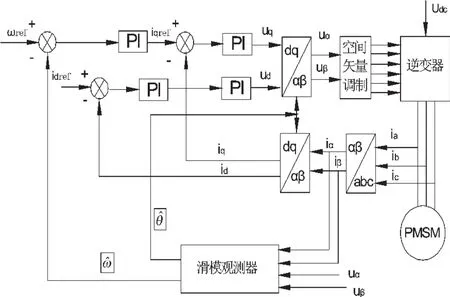
图1 基于滑模观测器的永磁同步电机无传感器矢量控制框图
为验证滑模观测器的可行性和有效性,根据图1所示的基于SMO的三相PMSM无传感器控制框图,在Matlab/Simulink环境下搭建其仿真模型。永磁同步电机无传感器矢量控制的控制方式采用idref=0的控制策略。仿真时电机模型参数设置如表1所示。
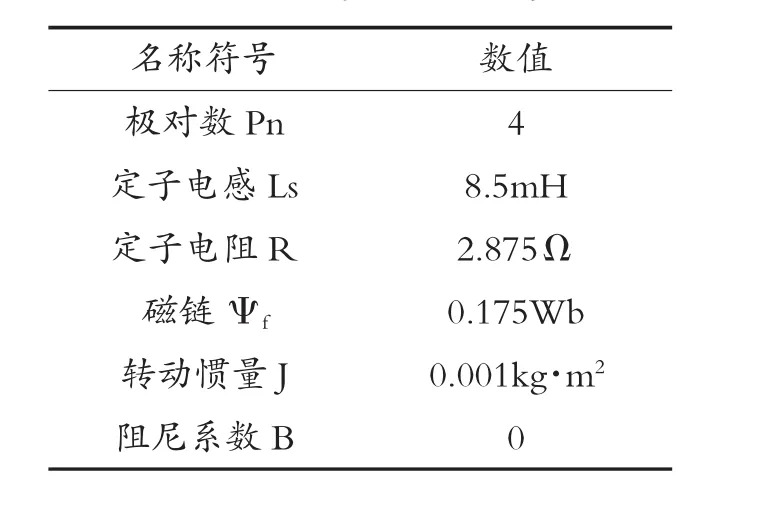
表1 永磁同步电机仿真参数
仿真条件设置为:直流侧电压Uab=311V,PWM开关频率fpwm=10kHz,仿真时间t=0.15s。由于搭建的模型相对复杂,为了能够使仿真速度加快,选用定步长ode3(Bogacki-Shampine)算法,且仿真步长设置为 2×10-7s。
电机的初始转速800r/min,0.04~0.05s突变为1000r/min;空载启动,在 0.07~0.08s时,Te=10Nm 发生阶跃变化。其中图2转速估计值与实际值的变化曲线,图3转速估计误差的变化曲线,图4转子位置估计值与实际值的变化曲线,图5转子位置估计误差的变化曲线,从图中可以看出启动过程平稳,估计值能准确快速跟踪真实值,观测精度高。在稳态运转时,转速误差约为0.05r/min,即使是在转速突变和负载突变时,转速误差也大约在0.3r/min左右,而转子位置最大误差不超过0.8rad,误差非常小,跟踪精度高。验证了此算法鲁棒性好,抗负载干扰能力强,收敛速度快,抖振小,保证了系统具有良好的动静态特性。
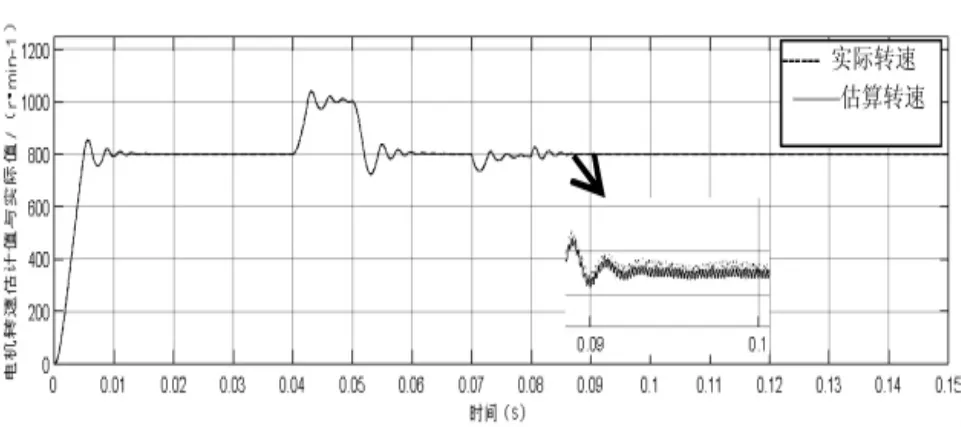
图2 转速估计值与实际值的变化曲线
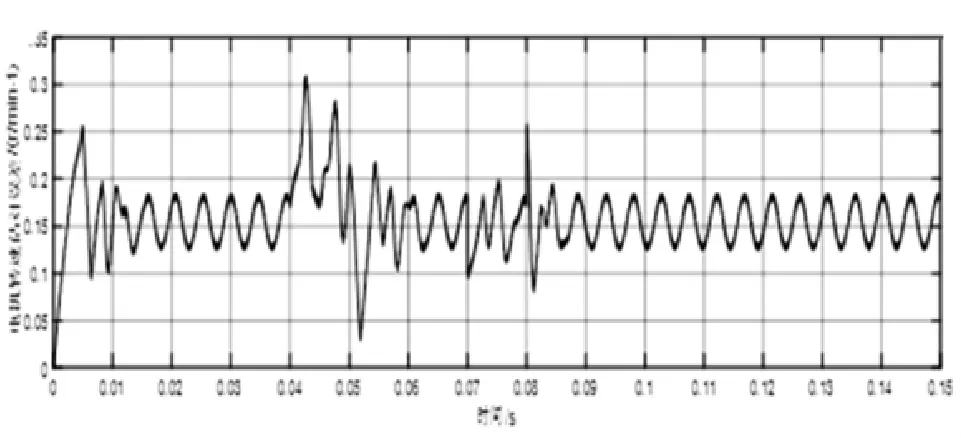
图3 转速估计误差的变化曲线

图4 转子位置估计值与实际值的变化

图5 转子位置估计误差的变化曲线
5 结 语
在分析传统滑模观测器的基础上,采用连续函数v(x)代替符号函数sign(x)设计了永磁同步电机无传感器控制的滑模观测器并对其进行了稳定性证明。通过仿真实验表明:此控制器在减少滤波环节和相位补偿环节的同时有效抑制了抖振,并能够实现电机转子位置和转速的精确估计,结果表明该滑模观测器可行有效。
猜你喜欢
微电机(2022年8期)2022-10-12
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年2期)2021-06-09
郑州大学学报(工学版)(2020年2期)2020-06-16
中学生数理化·高一版(2019年12期)2019-12-31
汽车电器(2019年2期)2019-03-22
中国钢铁业(2018年6期)2018-07-26
太原科技大学学报(2016年4期)2016-07-13
中国钢铁业(2014年4期)2014-08-22