
基于磁流变阻尼器的6自由度半主动隔振系统
2019-08-27 07:33芮筱亭
噪声与振动控制 2019年4期
廖 勇,朱 炜,江 民,芮筱亭
(南京理工大学 发射动力学研究所,南京 210094)
直升机的振动水平和噪声水平会影响其隐身性和机组成员的舒适性,是现代军用直升机的一项重要战术技术指标,影响直升机的作战效能和战场生存能力。处于非对称、非定常的气动环境中的直升机旋翼成为了直升机的主要振源。旋翼各叶片上产生的激振力传递到桨根处合成激振力和力矩,通过主减速器传递到机身及其他部件,因此在主减速器和机身之间安装隔振装置可以有效减小直升机的振动[1-2]。
Stewart机构作为典型的并联机构,具有承载能力强、精度高、结构稳定紧凑、运动惯量小、动态特性好等优点[3],国内外学者对其进行了许多研究。Stewart机构的动力学建模方法除了常规的拉格朗日法和牛顿-欧拉法外,也有学者提出了一些新的方法,比如G Chen,X Rui[4]等使用多体系统传递矩阵法建立Stewart机构的线性动力学模型,该方法的特点在于计算速度快。钱承[5]等分析了Stewart并联机构的动力学特性,并通过Adams仿真,模拟了Stewart并联机构的工作状况和振动特性。磁流变阻尼器则可以通过控制输入的电流改变其阻尼力的大小,是近年来半主动隔振的主要耗能器件之一,其具有出力大且可控、结构简单、具有失效安全性等优良特点[6]。因此,基于Stewart机构的6自由度磁流变半主动隔振平台将具有承载能力强、可减小6个自由度方向的振动、隔振带宽大等优良特点。Memet Unsal[7]建立基于磁流变阻尼器的6自由度半主动悬架模型并进行了理论仿真,结果表明其设计的隔振平台在X、Y、Z3个平移方向的减振效果良好。王强[8]设计了一个立方体构型的6自由度磁流变隔振平台,仿真和实验的结果表明平台可以有效抑制共振,并在高频区也有良好的减振效果。Jean等[9]设计了一个用于卫星整星微振动隔振的平台,该平台基于Stewart机构,采用磁流变阻尼器作为耗能元件,他们的实验表明该隔振平台效果甚好。
直升机主减-旋翼系统的振动一般在12 Hz~25 Hz,属于低频隔振。传统的主减隔振方式主要有节点梁隔振、聚焦式隔振以及动力反共振隔振,他们都属于被动隔振,只对特定频率有较好的隔振效果,隔振带宽小[11-13]。为解决传统主减隔振的这些缺点,设计了一个采用磁流变阻尼器的基于Stewart机构的主减安装隔振系统,该系统由一个支腿是磁流变阻尼器的六自由度的平台及其半主动控制系统组成。首先使用牛顿-欧拉法建立6自由度隔振平台的动力学模型,分析其动力学行为;其次通过磁流变阻尼器的力学性能实验,建立磁流变阻尼器的动力学模型;最后,通过计算机数值仿真,验证控制方法并分析所设计隔振平台的隔振性能。
1 6自由度隔振平台动力学建模
采用牛顿-欧拉法建立基于Stewart机构的6自由度隔振平台的动力学模型。隔振平台模型如图1所示。
平台由一个上平台(直径小)、一个下平台(直径大)和6根支腿组成。在下平台建立惯性坐标系Odxdydzd,支腿与下平台连接点分别为d1、d2、d3、d4、d5、d6;在上平台几何中心处建立连体坐标系Ouxuyuzu,支腿与上平台连接点分别为u1、u2、u3、u4、u5、u5。
连体系中一点P转换到惯性系中的坐标为

式中,R表示连体系转换到惯性系的旋转矩阵;上标d和u表示点所在坐标系,若无,则默认为惯性系表示连体系原点在惯性系下的位置矢量。
1.1 支腿运动学分析
第i条支腿所在直线的矢量

式中:ru,i和rd,i分别表示上下平台与支腿连接点在惯性系中的位置矢量,该式即为隔振平台的运动反解方程。
第i条支腿单位矢量

式中:Li为第i条支腿长度
将式(2)两边对时间t求导,即可得到平台与第i条支腿连接点的速度与上平台速度关系为

式中:ω为上平台和负载旋转角速度。
n˙i可以分解为沿支腿矢量方向的速度和垂直于支腿方向的速度,设W为支腿旋转的角位移,则

在式(5)两边叉乘ei化简可得到支腿旋转角速度为


图1 平台简化模型
将式(4)对时间t求导,可以得到支腿连接点加速度与平台姿态的关系

同样,连接点的加速度可以分解成沿支腿矢量方向的分量和垂直于支腿矢量旋转的角加速度,即将式(5)对时间求导,得到

在等式两边点乘ei,整理可得到沿支腿方向的加速度为

在式(9)两边叉乘ei,整理可以得到支腿旋转的角加速度为

1.2 支腿动力学分析
考虑整条腿上的力矩平衡,并忽略球铰和虎克铰的摩擦力,可得到腿的欧拉方程

式中:mldrld×ald为支腿下部分加速度引起的力矩;mlurlu×alu为支腿上部分加速度引起的力矩;(Ild+为支腿转动引起的力矩;n×Fs为支腿与上平台接触点的约束力矩;Mlue为支腿下部虎克铰的约束力矩。
令

则式(11)可以写为

式(12)两边叉乘ei以消去未知量Mlu,整理得到

式(13)表示支腿对上平台的作用力。
支腿上部分的力平衡方程为

式中:Fi是第i条支腿阻尼器和弹簧的合力。
将式(13)代入式(14)中,整理得到

式(15)即为阻尼器需要输入的力
1.3 平台动力学分析
上平台的牛顿平衡方程为

式中:a是上平台和负载重心的加速度;M是上平台和负载的质量;Fw是施加在负载和上平台上的外力。
将式(13)代入式(16)得到
根据平台的重心处力矩平衡,列出欧拉方程为

式中:r为负载和上平台重心点到隔振平台重心点的位置矢量;Mw为施加在上平台和负载的外力矩。
式(17)和式(18)给出了 6个方程,包含了x1、x2、x3、x4、x5、x66个未知数。将式(17)和式(18)联立,写成矩阵形式得到

式中:
对于式(19)表示的线性系统,可以求解出x,即ni·Fs,i,再由式(15)即可求得需要阻尼器和弹簧提供的力。
2 磁流变阻尼器建模
磁流变阻尼器通常由活塞、活塞杆、气囊、励磁线圈以及磁流变液组成,如图2所示。

图2 磁流变阻尼器结构
当励磁线圈通电产生磁场,磁流变液通过有磁场的阻尼通道时,黏度变大。通过改变电流大小来控制磁场强弱,可以控制磁流变液的黏度,进而达到控制阻尼力大小的目的。
2.1 阻尼器力学性能测试
采用Lord公司生产的阻尼器作为磁流变阻尼器的样机阻尼器,阻尼器如图3所示。

图3 Lord RD-8040-1磁流变阻尼器
其参数如表1所示。要使阻尼器能够正常工作,需要对其进行力学性能测试。
测试工具为W+B动态疲劳实验机,测试系统如图4所示。
通过测试得到磁流变阻尼器在不同工况下的力-位移曲线和力-速度曲线,图5和图6分别是激励为10 mm、1 Hz和10 mm、2 Hz在不同电流工况下的力-位移曲线和速度-位移曲线。
从图中可以看出,阻尼器的示工曲线饱满,阻尼器最大出力达到1.5 kN,而最小出力仅100 N,阻尼可调系数(库仑力与黏滞阻尼力的比值)将近15,阻尼可调范围极大,阻尼器的动力学性能优秀。
2.2 建立阻尼器力学模型
使用Bouc-Wen模型来模拟磁流变阻尼器的动力学行为。Bouc-Wen模型曲线连续光滑,能够很好地模拟出在低速情况下的阻尼力-速度曲线,尤其能够反映低速情况下的滞回特性。该模型如图7所示。

图4 阻尼器力学性能测试系统
阻尼力表达式为

其中:滞变位移z由式(21)给出

式中:F为磁流变阻尼器总阻尼力;c0为磁流变液屈服后黏性系数;a为滞变力与磁流变阻尼器总阻尼力所占比例的调节参数;Z为滞变位移;x为阻尼器的位移;x˙为阻尼器的速度;A为与最大阻尼力相关的比例系数;β为与滞回环高度相关的调节参数;n为曲线圆滑系数,一般取n=2;γ为与滞回环宽度相关的调节参数;k0为塑性阶段阻尼器滞回环宽度的调节参数。
通过调整模型参数γ、β和A的取值,可以改善模型输出的力-速度回程曲线的线性形状和屈服前后渐变段的光滑性。

图510 mm、1 Hz工况下的力-位移曲线和速度-位移曲线
Bouc-Wen模型的参数需要根据实验数据,通过参数识别获取。本文采用遗传算法进行参数识别。遗传算法的基本步骤包括:编码、初始群体的生成、交换、适应度值的评估检测、优良个体选择、变异、终止等。

图610 mm、2 Hz工况下的力-位移曲线和速度-位移曲线

图7 Bouc-Wen模型
Bouc-Wen模型中有α、c0、k0、γ、β、A、x0等7个参数需要进行识别。从实验图看来,磁流变阻尼器的滞回曲线不存在偏移现象,所以可以取x0=0。取拟合值与实验值的均方根误差作为目标函数,即

式中:i为第i个采样点,F为拟合的阻尼器力输出值,Ft为实验阻尼器力输出值。
通过采用逐步缩小参数范围的方法以提高精度,遗传算法的参数选取如表2所示。除表中所列参数,其余参数均采用遗传算法工具箱的默认值。
Bouc-Wen参数拟合结果为

表2 遗传算法参数

式中,I为磁流变阻尼器的输入电流。
选取部分工况下的数据进行拟合,验证Bouc-Wen模型可靠性。图8是对激励为10 mm、2 Hz、电流为0 A、0.5 A、1 A、1.5 A、2 A的工况下,阻尼器的实验数据与拟合数据的对比图。
从图中可以看出,拟合出的曲线与实验的曲线重合度很高,表明本次识别的磁流变阻尼器的Bouc-Wen模型可以真实反映出磁流变阻尼器实际的力学行为。

图8 拟合曲线与实验曲线对比图
3 隔振系统仿真
3.1 on-off控制
理想的天棚控制是设想将阻尼器安装在负载和虚拟的惯性空间(sky)之间,如图9(a)所示。理想天棚控制的阻尼力为

式中:csky为天棚阻尼器阻尼系数。
天棚阻尼控制的特点是阻尼器只产生与负载运动方向相反的阻尼力Fd,可以有效抑制负载的运动。但在实际工程中,难以将阻尼器安装在负载与“天棚”之间。
Karnopp等提出了on-off控制来近似实现理想的天棚阻尼控制。其原理是将阻尼器安装在负载与基底之间,如图9(b)所示。

图9 理想天棚阻尼控制与等效天棚阻尼器控制
定义vm负载质量的速度,向上为正;vx为负载与基底的相对速度,其为正时,基底与负载距离增大。与理想天棚阻尼控制相比,on-off控制有以下两种情况:当vm·vx> 0时,on-off控制和理想天棚阻尼控制所产生的阻尼力方向相同,两者的作用相同;当vm·vx<0时,on-off控制和理想天棚阻尼控制所产生的阻尼力方向相反,两者的作用相反,on-off控制会恶化隔振效果,需要使阻尼器出力最小。
综上,on-off控制策略可以描述为on-off控制与理想天棚控制作用相同时,给磁流变阻尼器输入最大电流;作用相反时,断开磁流变阻尼器的供电。即

式中:Fd(Imax)和Fd(Imin)分别表示输入最大电流和最小电流时磁流变阻尼器输出的力。
3.1 单腿仿真
首先,使如图9(b)所示的简单模型,即单腿模型,验证on-off控制策略的有效性。
使用Solidworks与SimMechanics联合仿真来搭建单腿的数值仿真模型,如图10所示。
图11是阻尼器与弹簧模块,需要向其输入腿的相对位移、负载绝对速度、腿的相对速度,其输出是图10中的Fd,仿真参数如表3所示,结果见图12。

图10 单腿模型

表3 单腿隔振系统仿真参数

图11 磁流变液阻尼器与弹簧模型
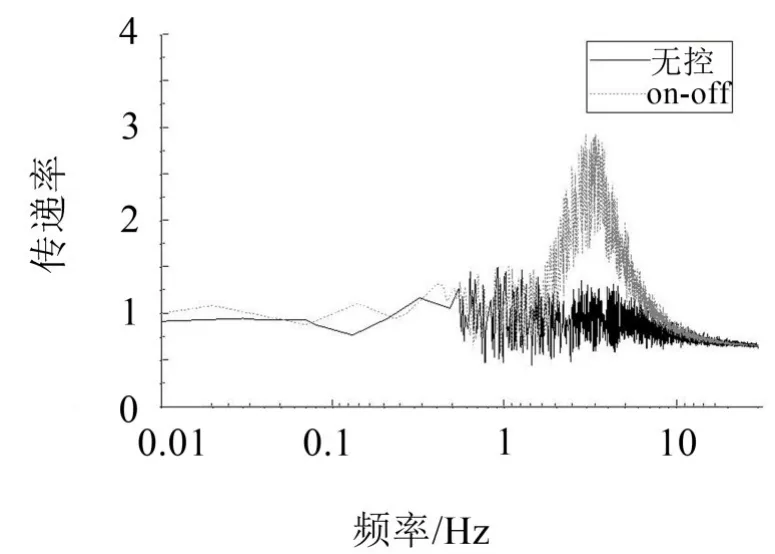
图12 单腿有控制与无控制振动传递率
3.26 自由度隔振系统仿真
同样,6自由度磁流变阻尼器半主动隔振系统的性能仿真采用Solidworks与SimMechanics联合仿真。在Solidworks中绘制如图13所示的隔振平台的三维图形后,根据前文推导的6自由度隔振平台的动力学方程,在SimMechanics中搭建出如图14所示的隔振系统动力学仿真模型。隔振系统的仿真参数见表4。该模型的重力方向为-Y方向。

图13 隔振平台三维图

表4 隔振系统仿真参数
弹簧与磁流变液阻尼器的系统输入是支腿与上下虎克铰链接的点的相对速度和相对位移、负载的绝对速度,输出加载在上下虎克铰之间的力Fd。
在Y轴方向施加加速度正弦扫频激励信号,振幅为1 g,频率为0.1 Hz~30 Hz。无控和有控的仿真结果如图15所示。
从图15可以看出平台共振区为3 Hz~5 Hz,有控制的隔振平台隔振性能优秀,在有效降低共振的同时,在10 Hz~30 Hz的高频段有50%以上的隔振效果。
同样在Z轴施加一个加速度正弦扫频激励信号,幅值为0.1 g,频率范围为0.1 Hz~30 Hz,无控和有控的仿真结果如图16所示。
从图16可以看出平台共振区在0.6 Hz~0.9 Hz,有控制的隔振平台隔振性能优秀,有效降低共振的同时,在10 Hz~30 Hz的高频段有40%以上的隔振效果。由于6自由度隔振平台具有对称性,因此平台在Z轴和X轴方向上的振动效果是一样的,因此在此不再赘述X轴方向的扫频振动。

图146 自由度隔振系统仿真模型
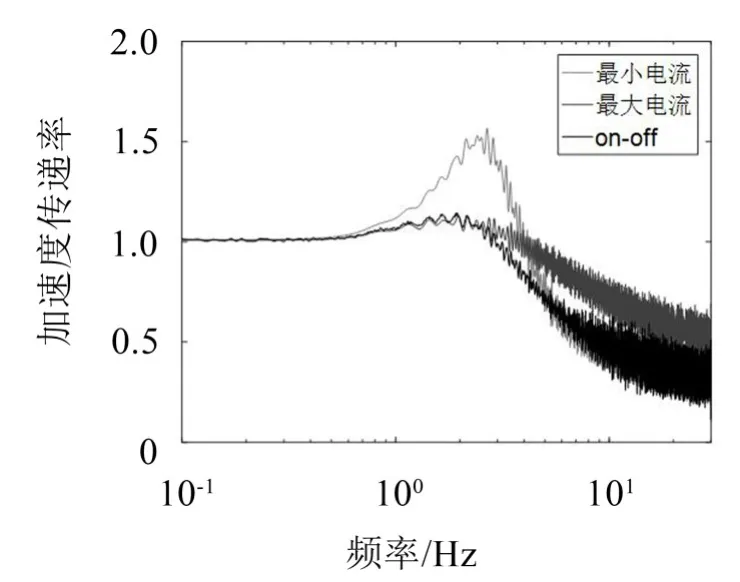
图15 Y方向加速度扫频激励下的振动传递率
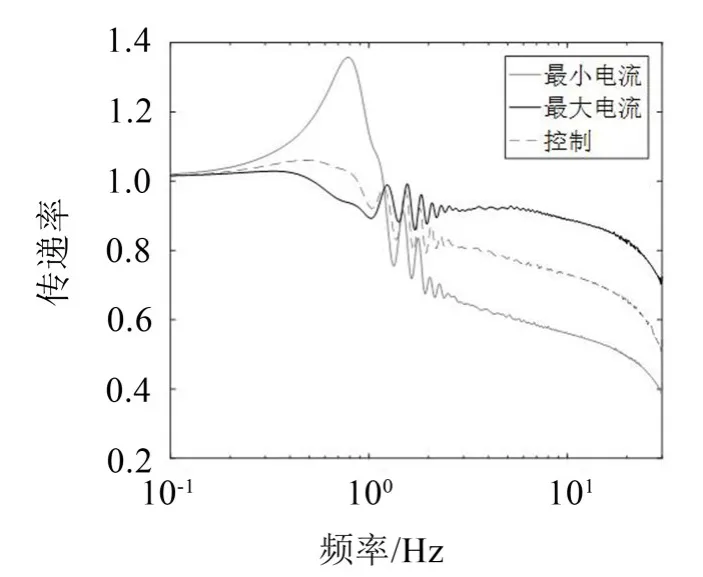
图16 Z方向加速度扫频激励下的振动传递率
由于Stewart机构具有强耦合性,因此为了进一步了解隔振平台的性能,给隔振平台的下平台同时施加X、Y、Z3个方向各自共振频率的位移激励,激励如下


图17 被动与on-off控制下支腿阻尼器的出力

图18 未施加控制与on-off控制下支腿伸缩量
从仿真结果看,各支腿磁流变阻尼器出力和伸缩量均在阻尼器的标定范围内。对比图17和图18中未施加控制和施加控制后腿的出力和伸缩量可以看出,on-off最优控制是有效果的,施加控制后,阻尼器的出力和伸缩量都有一个明显的跳跃变化,与式(23)的描述相一致。
在无旋转激励的情况下,隔振平台产生了绕X轴和Z轴的角位移,而基本无绕Y轴的转动,这表明隔振平台具有一定的耦合性。表5列出了各方向上振动的均方根值。

表5 各方向的位移/角位移均方根

图19 负载在X、Y、Z方向上的位移
从表5中可以清楚看出在施加控制后,耦合强度减弱,与被动相比,振动幅度都有减小。在X、Y、Z方向的平移以及绕X轴、绕Z轴转动的共振频率上,振动分别降低26.92%、39.46%、22.77%、53.06、56.79。仿真结果见图19至图20。

图20 负载绕X轴、Z轴的角位移
4 结语
(1)本文针对直升机旋翼-主减系统多自由度振动问题设计了一个基于磁流变阻尼器的6自由度磁流变半主动隔振系统,采用牛顿-欧拉方法建立其动力学模型。
(2)通过磁流变阻尼器的力学性能实验,得到磁流变阻尼器的力学性能。使用遗传算法根据实验结果识别出了磁流变阻尼器Bouc-Wen模型的参数,该模型可以较好反映出所使用磁流变阻尼器的实际动力学行为。
(3)隔振系统的仿真结果表明,该隔振系统具有较好的隔振效果,当激励频率高于共振频率时,隔振效果良好,减少振动50%以上,可以有效降低直升机机体振动。
猜你喜欢
民间故事选刊(2022年12期)2022-10-30
疯狂英语·初中天地(2022年9期)2022-08-29
现代制造技术与装备(2022年1期)2022-02-21
煤气与热力(2021年6期)2021-07-28
北京理工大学学报(2020年11期)2020-12-15
装饰装修天地(2020年10期)2020-07-04
中国科技纵横(2020年5期)2020-06-29
振动、测试与诊断(2017年5期)2017-11-07
汽车工程(2015年8期)2015-04-12
汽车科技(2014年3期)2014-08-02
