
基于神经网络逆系统的智能汽车纵横向解耦控制
2019-12-10 03:09梁艺潇李以农余颖弘郑玲
湖南大学学报·自然科学版 2019年10期
关键词:神经网络
梁艺潇 李以农 余颖弘 郑玲


摘 要:针对汽车纵横向运动中的耦合现象,以四轮驱动、前轮转向的智能汽车为研究对象,建立汽车纵横向动力学模型并通过Interactor算法对模型的可逆性进行分析. 在已有的传统伪线性系统结构的基础上,根据智能汽车的特点,建立了可对接智能汽车上层规划模块的伪线性系统. 为了实现汽车纵横向运动之间的解耦,采用基于神经网络逆系统的解耦控制策略,构造神经网络并对其进行训练,并将神经网络逆系统与内模控制器组成闭环控制回路,对纵向速度和横摆角速度进行内模反馈调节,进一步提升控制系统的性能. 仿真结果表明,所设计的基于神经网络逆系统的控制方法能实现良好的解耦特性,且相比于其他的控制方法,在各种输入条件下,都能实现对于期望速度和期望横摆角速度良好的跟踪性能,同时,质心侧偏角始终被控制在一个较小的范围内,这有利于智能汽车路径跟踪的精确性和行驶稳定性.
关键词:智能汽车;纵横向解耦控制;神经网络;逆系统方法;汽车动力学
中图分类号:U463.1;TP273 文献标志码:A
Decoupling Control of Longitudinal and Lateral Motion for
Intelligent Vehicle Based on Neural Network Inverse Method
LIANG Yixiao,LI Yinong?覮,YU Yinghong,ZHENG Ling
(State Key Laboratory of Mechanical Transmissions,Chongqing University,Chongqing 400044,China)
Abstract: Aiming at the coupling phenomenon of longitudinal and lateral motions for automobile, autonomous vehicle with Four-wheel-driving and front-wheel-steering was set as the subject investigated. A dynamic model which reflects the longitudinal and lateral motion of vehicle was established and the reversibility of this model was analyzed by the interactor algorithm. On the basis of the existing classical structure of pseudo-linear system, the pseudo linear composition system with the ability to fit the upper level planning system of intelligent vehicle was established according to the characteristic of intelligent vehicle. In order to realize the decoupling of longitudinal and lateral motions for vehicle, an approach based on network inverse method was proposed as the decoupling control strategy in this paper, which can be combined with the internal model controller to form closed loop structure and it can significantly improve the performance of the plant by feedback and adjust the longitudinal speed and yaw rate of automobile. The simulation results validated the decoupling performance of the proposed approach. The results also showed that when compared with other control algorithms, the proposed approach can achieve good tracking performance of longitudinal speed and yaw rate under varieties of input condition. Further, the sideslip was constrained in a small range, which is beneficial to the path tracing accuracy and the stability of autonomous vehicle.
Key words: intelligent vehicle ;decoupling control of longitudinal and lateral motion ;neural networks;inverse approach;vehicle dynamics
近年來,具有安全、节能、环保、舒适等特点的智能汽车已成为汽车产业未来的发展趋势[1-3],以纵横向控制为代表的智能汽车底盘控制也逐渐成为了亟待解决的问题[4-5],由于智能汽车的强耦合性和非线性,各个方向的运动之间往往存在着强烈的耦合,这会引起各子系统执行器之间的干扰和冲突[6-8],给智能汽车的动力学精确控制带来了较大的困难. 通过解耦控制来减弱车辆各个方向运动之间的耦合效应,提升智能汽车底盘系统的控制性能,是解决这一难题的关键.
关于汽车系统动力学的解耦控制,国内外学者开展了很多的研究. 朱冰等[9]应用特征轨迹法实现了主动前轮转向和主动制动系统之间的解耦;Jia[10]、陈无畏等[11]将非线性系统输入输出解耦方法运用到汽车系统动力学中;Li等[12-13]将鲁棒控制理论应用到汽车纵横向运动的解耦之中,取得了很好的效果. 然而,上述解耦控制方法,或者其控制器有着特定的适应条件,抑或其理论推导过程相当复杂,往往需要大量的计算. 而逆系统方法由于其直观、清晰的特点,近来也被大量应用于汽车系统动力学解耦控制中. Zhang等[14]基于解析的方法建立了四轮独立驱动电动汽车的逆系统,并通过μ综合法增强控制系统的鲁棒性. 朱茂飞等[15]、Wang等[16]为了提高控制系统对参数变化的自适应能力和对负载扰动的鲁棒性,应用静态神经网络构造逆系统,实现了汽车侧向、垂向、侧倾之间的解耦. 上述研究在汽车动力学解耦控制领域取得了重要的进展,但其研究对象大多是基于传统汽车,解耦控制的指令来源于经过处理的驾驶员输入信号. 而在智能汽车中,上层规划模块可根据驾驶工况,驾驶需求等条件动态地计算得出汽车期望行驶参数[17],直接作为底盘动力学控制的指令,以传统汽车为对象设计的控制器与智能汽车上层规划模块之间很难对接. Marino等[18]通过对横摆角速度和质心侧偏角的跟踪误差进行反馈,实现了汽车横摆角速度和质心侧偏角之间的解耦,所设计的控制器可以由其理想横摆角速度控制实际横摆角速度,理想质心侧偏角控制实际质心侧偏角,该控制模式可实现与智能汽车上层规划模块的对接. 然而,文献[18]中的控制策略仅仅是在纵向速度固定的前提下,实现横摆角速度与质心侧偏角之间的解耦,其控制器性能在纵向速度发生变化的条件下不能保证,并没有实现智能汽车纵横向运动的解耦控制.
针对以上问题,本文以前轮转向,四轮驱动的智能汽车为研究对象,建立纵横向动力学模型并对其可逆性進行验证,建立可对接智能汽车上层规划模块的伪线性系统,采用神经网络逆系统方法实现汽车纵横向运动的解耦,并与内模控制器组成闭环控制回路,进一步提升控制系统的性能,所采用的方法具有直观、清晰的特点. 通过carsim与MATLAB/Simulink联合仿真验证了本文所提出的方法在多种工况下都具有良好的解耦性能及跟踪性能.
1 车辆动力学模型及其可逆性分析
1.1 车辆动力学模型
本文的研究对象为四轮驱动、前轮转向的智能汽车,车辆动力学模型是研究车辆纵横向控制的基础. 建立包含汽车纵向运动、横向运动以及横摆运动的三自由度车辆动力学模型[19],如图1所示,该模型具有较好的精度,能较为准确反映汽车纵横向运动特点以及耦合关系,各个方向上的动力学关系分别描述如下.
式中:m为整车质量;vx为纵向速度;β为质心侧偏角;a、b分别为前轴、后轴至质心距离;J为整车绕z轴的转动惯量;cf、cr分别为前轮、后轮的等效轮胎侧偏刚度;δf为前轮转角;Fxtotal为汽车4个轮胎产生的纵向力;Mz为由汽车左右侧车轮纵向力之差所产生的主动横摆力矩.
在该系统模型中,状态变量x = [vx β γ]T ,输入变量为u = [Fxtotal δf Mz]T ,输出变量与状态变量相同,为y = [vx β γ]T . 显然,该系统各个方向之间的耦合较为严重,各个方向运动之间相互影响,为提升汽车动力学性能,有必要对其进行解耦控制.
1.2 系统的可逆性分析
本文采用逆系统的方式实现解耦控制,而系统的可逆性是逆系统法应用的前提. 对于多变量系统的可逆性证明,通常采用Interactor算法[14],Interactor算法通过计算输出变量y对时间的各阶导数,直到输出变量的某阶导数方程中含有输入变量u,通过雅可比矩阵的秩与系统阶数的关系来判断系统的可逆性. 由式(1)可得:
由此可以得到系统的向量相对阶为α = [α1 α2 α3]T = [1 1 1]T,相对阶之和∑α = 3 ,与系统的阶数相等. 由隐函数存在定理可得,该系统存在逆系统,其逆系统可表示为u = φ(vx β γ ■x ■ ■),按传统的逆系统构造伪线性系统的方式,可构造为如图2所示的由3个一阶积分线性子系统所组成的控制系统. 而在智能汽车的运行环境中,汽车在未来一段时间的期望速度vxd、期望横摆角速度γd等行驶参数都可以通过上层规划模块获得. 因此,本文将传统的伪线性系统改造为图3所示的形式,即不再需要一阶积分模块,可直接通过期望的汽车行驶状态控制汽车的实际行驶状态,这是更加适用于智能汽车的控制模式.
1.3 四轮轮胎纵向力分配
由于本文主要研究的是汽车日常行驶工况下车身动力学的纵横向解耦控制,未考虑轮胎处于附着极限的情况以及在此情况下产生的轮胎力耦合. 因此本文假设轮胎侧偏角是处于较小的范围内,在该条件下,轮胎的侧偏力与侧偏角呈线性关系. 在轮胎纵向力分配模块中,采用基于规则的轮胎纵向力分配方式,具体的分配方式如式(10)所示.
式中:Ff1、Fr1、Ffr、Frr分别表示左前轮、右前轮、左后轮、右后轮的轮胎纵向力;r为汽车的轮距.
2 基于神经网络的逆系统设计
2.1 神经网络的构造
由于车辆系统的复杂性,基于数学模型建立的解析逆系统存在模型不确定性以及对于模型非线性简化的问题,其解耦性能存在一定的局限性. 为了解决这一问题,考虑到神经网络具有非线性,自适应等优点,本文利用神经网络来构造逆系统. 由无人驾驶汽车上层规划模块所得出的期望速度vxd,质心侧偏角βd,期望横摆角速度γd以及它们的微分作为逆系统的输入层,输出层包括汽车的前轮转角δf,总的纵向力Fxtotal以及由纵向力产生的主动横摆力矩Mz,中间隐含层节点数范围可参照如下公式[20]:
式中:n为输入向量的维数;k为输出向量的维数;a为小于等于10的常数.
在本文中,输入向量的维数为6,输出向量的维数为3,由此通过式(11)确定隐含层节点数的范围为3≤m≤13,在此基础上,通过试凑法最终确定隐含层节点数为12,从而得到逆系统的神经网络6-12-3,逆系统神经网络结构如图4所示.
2.2 神经网络数据获取及训练
本文采用Carsim8.1中的B级运动型汽车作为试验车辆以获得神经网络的训练数据.
设定初始车速为50 km/h,输入信号如图5所示. 其输入激励信号分别为:前轮转角激励、总的纵向力激励、主动横摆力矩激励. 输入激励需要采用适当的不同幅值、不同频率、不同类型的信号以尽可能多地覆盖汽车实际行驶中可能出现的各种输入激励情况.
以1 mm为采样周期对输出进行采样,得到50 000组输入输出数据,得到的输出响应如图6所示,可以看出,输出响应在纵向上包含了匀速行驶,轻微加减速,急加减速等工况,速度也基本反映了汽车在日常行驶中的低速,中速,高速情况;在横向上,反映了不同程度的转向;同时,也包含了纵横向耦合作用的因素. 由此可知,该输出响应基本覆盖了汽车日常行驶时的各种常见工况.
基于离差标准化的思想,利用mapminmax函数将50 000组输入输出数据进行归一化,由图4可知,所构造的逆系统神经网络属于前向神经网络. 因此使用newff函数建立神经网络,选取Leverberg-Marquartdt算法中的trainlm作为神经网络训练函数,因该函数学习速度较快且适用于本文所构造的这一类的中小规模神经网络,同时,考虑到神经网络的传递函数必须是连续可微的,输入层和中间隐含层采用transig作为传递函数,输出层采用purlin作为传递函数,对建立的神经网络进行训练,设置训练次数为1 000次,学习效率为0.05,训练误差目标为1×10-4,经过600次训练,达到所要求的训练
精度.
2.3 神经网络的验证
对上面得到的神经网络逆系统性能进行验证,验证结果如图7所示.
由图7可以看出,神经网络逆系统辨识得到的输入曲线与实际的输入曲线基本上是重合的,说明神经网络逆系统很好地将非线性系统转化为了可实现解耦的伪线性系统.
2.4 内模闭环反馈策略
系统解耦后,多输入多输出系统转变为了3个单输入单输出系统. 为进一步改善各个子系统的控制效果,设计闭环控制回路对系统进行反馈控制. 利用内模控制的方式对系统输出进行在线修正,使得系统的实际速度跟踪期望速度,系统的实际横摆角速度跟踪期望横摆角速度. 由于在汽车的行驶过程中,期望的质心侧偏角在多数情况下基本为零,且汽车的质心侧偏角信息通常难以直接获取,因此,质心侧偏角仍然采用开环控制的形式,整体的结构见图8.
为避免执行器高频抖振,在纵向速度和横摆角速度内模反馈回路中添加截止频率为10 rad/s的低通滤波器.
3 仿真分析与验证
本文采用Carsim8.1中的B级运动型汽车建立仿真模型,采用MATLAB/Simulink建立控制器,通过Carsim与MATLAB/Simulink联合仿真的方式来对本文所设计控制系统的有效性进行验证.
车辆动力学模型的各项参数如表1所示. 在仿真试验中,智能汽车期望的行驶参数根据仿真工况进行设定.
本文的仿真试验主要包括以下几个方面:神经网络逆系统方法的解耦性能及输入输出跟踪性能验证,对基于输入输出之间的截断频率特性建立解耦变量映射关系的解耦控制[21],未考虑动力学解耦的纵横向耦合控制[22],采用本文的基于神经网络逆系统方法的解耦控制进行3种典型工况下的仿真,并与输入的理想期望值進行对比分析.
3.1 解耦性能及输入输出跟踪验证
为了验证所设计的神经网络逆系统在纵横向的解耦性能,设定期望初始速度为50 km/h,在第1 s时,以5 km/h2的加速度加速至80 km/h. 同时,期望横摆角速度设定频率为1 Hz,幅值为1 rad/s的正弦信号,期望质心侧偏角设定为0 rad. 车辆在逆系统开环控制和内模闭环反馈控制下的实际响应结果如图9~图11所示.
由图9可知,逆系统开环控制以及内模闭环控制都可以使输出纵向速度跟踪期望的纵向速度,且由图10可知,即使两种控制方式的质心侧偏角都采用了开环控制的策略,其质心侧偏角始终可以维持在比较接近0的位置. 由图11可知,相比于采用逆系统开环控制的方式,逆系统闭环内模控制对于期望横摆角速度的跟踪效果更好. 同时,尽管在第
1 s纵向进行加速的时刻,横摆角速度响应受到了一定程度的影响,但仅仅经过了一段很短的时间,横摆角速度就恢复了对于期望值的跟踪. 因此,基于神经网络的内模闭环反馈系统具有良好的解耦性能和输入输出跟踪性能.
3.2 单移线工况仿真
单移线工况是在日常驾驶中较为常见的工况,常见于汽车换道的情况中,在单移线工况中,汽车纵向速度、质心侧偏角、横摆角速度的响应曲线分别见图12~图14.
由图12、图14可知,在匀速行驶的情况下,3种控制方式都能较好地实现对横摆角速度期望值的跟踪,其中耦合控制和本文所采用的的逆系统解耦控制的跟踪效果稍好于基于截断频率解耦控制的跟踪效果. 由图13可知,相比于耦合控制,逆系统解耦控制和基于截断频率的解耦控制都能对质心侧偏角起到较好的控制效果,其中,基于截断频率的解耦控制的质心侧偏角最小,这有利于汽车的轨迹跟踪精确性和稳定性行驶.
3.3 加速双移线工况仿真
加速双移线工况常见于汽车变道超车的情况中,在该工况中,设定汽车期望初始速度为50 km/h,在第1 s时,以5 km/h2的加速度加速至80 km/h. 汽车在该工况下的纵向速度、质心侧偏角、横摆角速度的响应曲线分别见图15~图17.
由图15~图17可知,在纵向速度发生较大变化的情况下,基于截断频率解耦控制的横摆角速度与期望值之间出现了较大偏差,在图15、图16中,较大的横摆角速度超调对其纵向速度、质心侧偏角也产生了较大的影响. 而耦合控制虽然能较好地跟踪
期望的横摆角速度,但其质心侧偏角仍然较大,这不利于汽车的路径跟踪精确性和行驶稳定性. 本文采用的逆系统解耦控制方法,在很好地跟踪横摆角速度的同时,对于质心侧偏角也有着较好的控制效果,尽管在双移线动作完成后,仍然有很小的质心侧偏角偏移,但相比于其他两种控制方式,其质心侧偏角始终都保持在很小的位置.
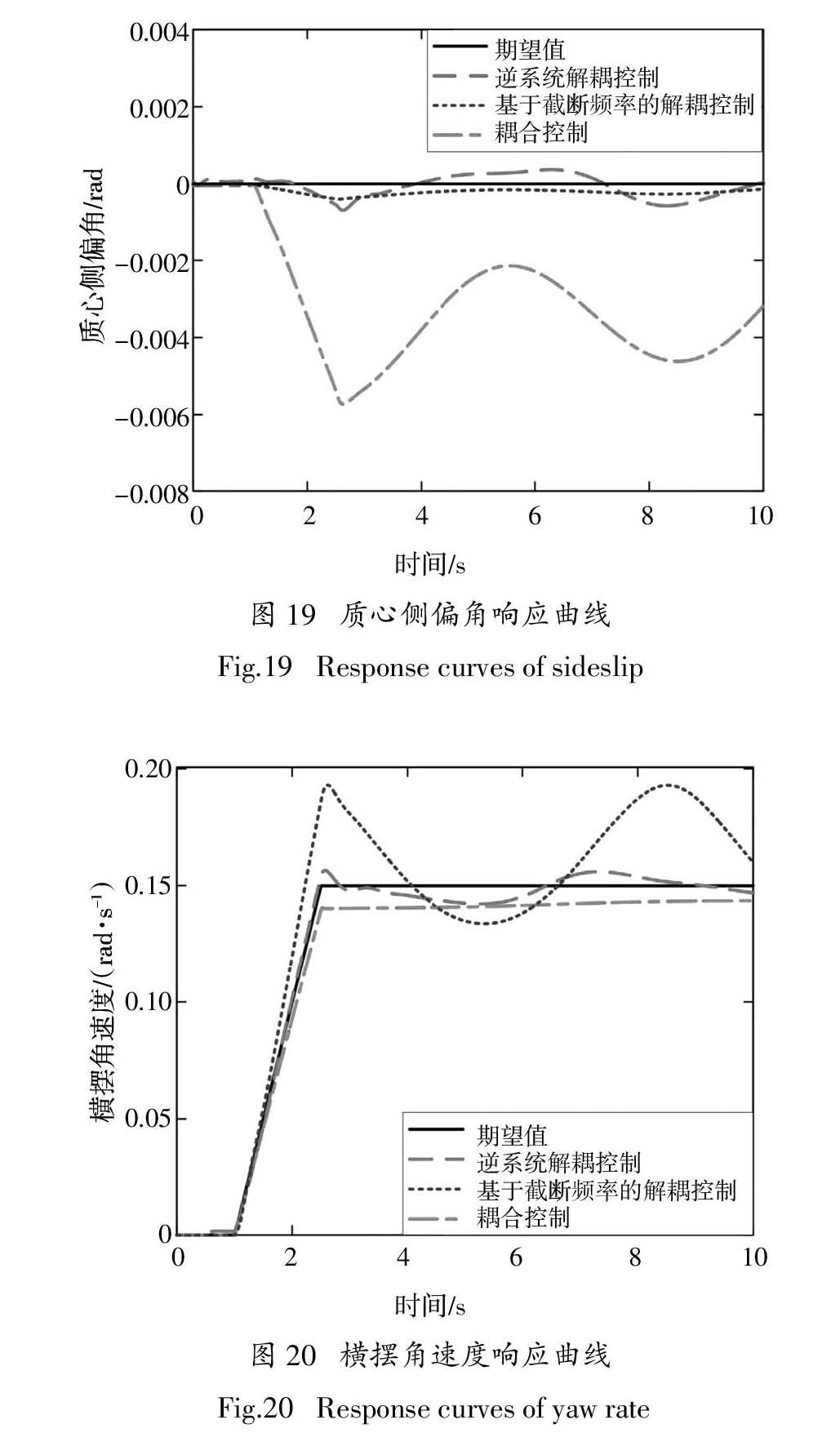
3.4 变速阶跃转向工况仿真
为研究汽车在纵向速度发生变化情况下,汽车纵横向耦合特性,验证几种控制方式的控制效果,本文在阶跃转向的基础上,设定纵向初始速度为60 km/h,同时按5(km/h)/1 Hz的正弦曲线变化. 汽车的纵向速度、质心侧偏角、横摆角速度响应曲线分别如图18~图20所示.
从图18~图20可以看出,在纵向速度发生变化的情况下,基于截断频率的解耦控制的横摆角速度响应也受到了较大的影响,在图19中,在横摆角速度和纵向速度发生变化的同时,耦合控制的质心侧偏角也发生了类似于阶跃的变化,较大的质心侧偏角不利于汽车的行驶稳定性. 本文采用的逆系统解耦控制,在很好地跟踪期望纵向速度的基础上,对于横摆角速度也能取得较好的跟踪效果,同时,质心侧偏角被控制在一个较小的范围内.
4 结 论
1)将神经网络逆系统的方法应用于汽车纵横
向解耦控制中,对汽车纵横向模型进行了可逆性分析,并基于智能汽车上层规划模块可得到期望行驶参数的特点,对伪线性系统进行改造,形成了由期望速度控制实际速度,期望质心侧偏角控制实际质心侧偏角,期望横摆角速度控制实际横摆角速度的控制模式.
2)在基于神经网络逆系统的开环伪线性系统
的基础上,加入内模控制构成闭环系统,对纵向速度和横摆角速度进行反馈调节,提升了神经网络逆系统的解耦性能和输入输出跟踪性能.
3)研究结果表明,基于截断频率的解耦控制仅在纵向速度恒定或变化较小的情况下能取得较好控制效果,而耦合控制难以将质心侧偏角控制在较小范围,相比之下,本文采用的内模闭环神经网络逆系统控制在多种情况下都能实现良好的输入输出跟踪特性和稳定性.
参考文献
[1] 李克强,戴一凡,李升波,等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报,2017,8(1):1—14.
LI K Q,DAI Y F,LI S B,et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Journal of Automotive Safety and Energy,2017,8(1):1—14. (In Chinese)
[2] GUO J H,LUO Y G,LI K Q,et al. Coordinated path-following and direct yaw-moment control of autonomous electric vehicles with sideslip angle estimation[J]. Mechanical Systems and Signal Processing,2018,105:183—199.
[3] 宋曉琳,周南,黄正瑜,等. 改进RRT在汽车避障局部路径规划中的应用[J]. 湖南大学学报(自然科学版),2017,44(4):30—37.
SONG X L,ZHOU N,HUANG Z Y,et al. An improved RRT algorithm of local path planning for vehicle collision avoidance[J]. Journal of Human University(Natural Sciences),2017,44(4):30—37. (In Chinese)
[4] 冀杰,李以农,郑玲,等. 车辆自动驾驶系统纵向和横向运动综合控制[J]. 中国公路学报,2010,23(5):119—126.
JI J,LI Y N,ZHENG L,et al. Integrated control of longitudinal and lateral motion for autonomous vehicle driving system[J]. China Journal of High Way and Transport,2010,23(5):119—126. (In Chinese)
[5] REN Y,ZHENG L,KHAJEPOUR A. Integrated model predictive and torque vectoring control for path tracking of 4-wheel-driven autonomous vehicles[J]. IET Intelligent Transport Systems,2019,13(1):98—107.
[6] 杨易,秦小飞,徐永康,等. 基于AFS与DYC的车辆侧风稳定性控制研究[J]. 湖南大学学報(自然科学版),2014,41(5):14—19.
YANG Y,QIN X F,XU Y K,et al. Study of vehicle crosswind stability control based on AFS and DYC[J]. Journal of Human University(Natural Sciences),2014,41(5):14—19. (In Chinese)
[7] MOUSAVINEJAD E,HAN Q L,YANG F,et al. Integrated control of ground vehicles dynamics via advanced terminal sliding mode control[J]. Vehicle System Dynamics,2017,55(2):268—294.
[8] 张宝珍,阿米尔,谢晖,等. 主动脉冲转向的横摆稳定性分析与试验研究[J]. 湖南大学学报(自然科学版),2016,43(10):32—41.
ZHANG B Z,A M R,XIE H,et al. Analysis and test of vehicle yaw stability control based on an active pulsed steering[J]. Journal of Human University(Natural Sciences),2016,43(10):32—41. (In Chinese)
[9] 朱冰,李幼德,赵健,等. 基于多变量频域控制方法的车辆底盘集成控制[J]. 农业机械学报,2010,41(1):14—17.
ZHU B,LI Y D,ZHAO J,et al. Integrated chassis control based on multivariable frequency domain control methods[J]. Transactions of the Chinese Society for Agricultural Machinery,2010,41(1):14—17. (In Chinese)
[10] JIA Y M. Robust control with decoupling performance for steering and traction of 4WS vehicles under velocity-varying motion[J]. IEEE Transactions on Control Systems Technology,2000,8(3):554—569.
[11] 陈无畏,徐娟,胡芳,等. 整车非线性系统的输入输出解耦及解耦比例微分控制[J]. 机械工程学报,2007,43(2):64—70.
CHEN W W,XU J,HU F,et al. Input-output decoupling and decoupling proportional differential control for vehicle nonlinear system[J]. Journal of Mechanical Engineering,2007,43(2):64—70. (In Chinese)
[12] LI M X, JIA Y M, DU J P. LPV control with decoupling performance of 4WS Vehicles under velocity-varying motion[J]. IEEE Transactions on Control Systems Technology,2014,22(5):1708—1724.
[13] LI M X,JIA Y M. Decoupling and robust control of velocity-varying four-wheel steering vehicles with uncertainties via solving attenuating diagonal decoupling problem[J]. Journal of the Franklin Institute,2016,354(1):105—122.
[14] ZHANG H,ZHAO W Z. Decoupling control of steering and driving system for in-wheel-motor-drive electric vehicle[J]. Mechanical Systems & Signal Processing,2018,101:389—404.
[15] 朱茂飞,陈无畏,夏光. 基于神经网络逆系统方法的汽车底盘解耦控制[J]. 农业机械学报,2011,42(12):13—17.
ZHU M F,CHEN W W,XIA G. Vehicle chassis decoupling control based on neural network inverse method[J]. Transactions of the Chinese Society for Agricultural Machinery,2011,42(12):13—17. (In Chinese)
[16] WANG C Y,ZHAO W Z,LUAN Z K,et al. Decoupling control of vehicle chassis system based on neural network inverse system[J]. Mechanical Systems & Signal Processing,2018,106:176—197.
[17] 《中國公路学报》编辑部. 中国汽车工程学术研究综述[J]. 中国公路学报,2017,30(6):1—197.
Editorial Department of China Journal of Highway and Transport. Review on China′s automotive engineering research progress[J]. China Journal of Highway and Transport,2017,30(6):1—197. (In Chinese)
[18] MARINO R,SCALZI S. Asymptotic sideslip angle and yaw rate decoupling control in four-wheel steering vehicles[J]. Vehicle System Dynamics,2010,48(9):999—1019.
[19] RAJAMANI R. 车辆动力学及控制[M]. 北京:机械工业出版社,2011:14—27.
RAJAMANI R. Vehicle dynamics and control[M]. Beijing: China Machine Press,2011:14—27. (In Chinese)
[20] 赵现枫. 基于神经网络逆系统的永磁同步电机控制优化研究[D].成都:电子科技大学机械与电气工程学院,2013.
ZHAO X F. Control optimization research of pmsm base on neural network inverse system[D]. Chengdu:School of Mechanical and Electrical Engineering,University of Electronic Science and Technology of China,2013.(In Chinese)
[21] FUJIMOTO H,YAMAUCHI Y. Advanced motion control of electric vehicle based on lateral force observer with active steering[C]//IEEE International Symposium on Industrial Electronics. Bari:IEEE Industrial Electronics Society,2010:3627—3632.
[22] 李以农,杨柳,郑玲,等. 基于滑模控制的车辆纵横向耦合控制[J]. 中国机械工程,2007,18(7):866—870.
LI Y N,YANG L,ZHENG L,et al. Vehicle longitudinal and lateral coupling control based on sliding mode control[J]. China Mechanical Engineering,2007,18(7):866—870. (In Chinese)
猜你喜欢
客联(2022年3期)2022-05-31
中国教育信息化·高教职教(2022年4期)2022-05-13
计算技术与自动化(2022年1期)2022-04-15
计算技术与自动化(2022年1期)2022-04-15
计算技术与自动化(2022年1期)2022-04-15
计算技术与自动化(2021年2期)2021-11-10
西部交通科技(2021年9期)2021-01-11
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
