
考虑操纵稳定性的自动驾驶汽车轨迹综合优化方法
2019-12-10 03:09兰凤崇李诗成陈吉清刘照麟
湖南大学学报·自然科学版 2019年10期
兰凤崇 李诗成 陈吉清 刘照麟

摘 要:針对自动驾驶汽车在局部轨迹规划上对车辆操纵稳定性考虑不足、对车辆模型过度简化和缺少对车辆舒适性客观评价的问题,建立了考虑车辆操纵稳定性的车辆三自由度模型,模拟自动驾驶汽车换道场景,根据输入车轮转角得到输出的换道轨迹,运算得到车辆换道行驶参数化方程和行驶轨迹特征. 运用BP神经网络对行驶轨迹特征进行识别,得到自动驾驶汽车换道持续时间和横向偏移距离所对应的车轮转角变化关系. 在不同换道车速下,根据不同换道持续时间和横向偏移距离,输入车轮转角得到换道优化轨迹簇和操纵稳定性参数. 在只考虑行驶效率和安全的常规轨迹优化方法的基础上,构建轨迹综合优化目标函数,考虑表征车辆换道过程舒适性和操纵稳定性的(横摆、侧倾、侧向)加速度变化率均值,提出一种基于行驶效率、安全性、舒适性和操纵稳定性的轨迹综合优化方法. 对轨迹综合优化目标函数进行求解得到最优换道行驶轨迹,联合仿真结果表明该方法优于常规轨迹优化方法且舒适性、操纵稳定性改善达20%以上.
关键词:自动驾驶;神经网络;操纵稳定性;轨迹优化
中图分类号:U471.1 文献标志码:A
Comprehensive Approach for Trajectory Optimization
of Autopilot Vehicles Considering Handling Stability
LAN Fengchong1,2,LI Shicheng1,2,CHEN Jiqing1,2?覮,LIU Zhaolin1,2
(1. School of Mechanical and Automotive Engineering,South China University of Technology,Guangzhou 510640,China;
2. Guangdong Provincial Automobile Engineering Key Laboratory,South China University of Technology,Guangzhou 510640,China)
Abstract: Automated driving vehicles have problems in local trajectory planning, such as insufficient consideration of vehicle handling stability, excessive simplification of vehicle models, and lack of objective evaluation of vehicle comfort. Considering the stability of vehicle handling, a three-degree-of-freedom model of vehicle is established. The lane changing scene of the self-driving car is simulated. The lane-changing trajectory is output by inputting the wheel angle,and the parameterization equation and driving trajectory characteristics of the vehicle are calculated. The BP neural network is used to identify the trajectory characteristics, and the change relationship between the lane change duration and lateral offset distance of the autonomous driving vehicle is obtained. At different lane changing speeds, according to different lane changing durations and lateral offset distances, the input wheel angles are used to obtain the lane change optimized by the trajectory clusters and steering stability parameters. Based on the conventional trajectory optimization method that only considers the driving efficiency and safety, the trajectory optimization objective function is constructed, by using the value of the yaw, roll, and lateral acceleration rate of the vehicle lane change process. A comprehensive trajectory optimization method based on driving efficiency, safety, comfort and steering stability is proposed. The trajectory optimization objective function is solved to obtain the optimal lane change trajectory. The joint simulation results show that the method is superior to the conventional trajectory optimization method, and the comfort and steering stability are improved by more than 20%.
Key words: automatic driving;neural networks;handling stability;trajectory optimization
近年来自动驾驶汽车致力于降低驾驶员操作复杂性,提高自动驾驶汽车的主动安全性,但是其发展同样面临考验,如局部轨迹规划中车辆行驶轨迹生成方式的可行性、轨迹参数化方法是否符合车辆运动学特性和轨迹优化方法是否能充分考虑车辆操纵稳定性、乘员舒适性等.
早期的轨迹规划是基于行驶轨迹的几何模型对车辆行驶位置状态进行约束,对车辆轨迹优化时没有充分考虑车辆的动力学和运动学参数,使得车辆无法完成按指定轨迹行驶,轨迹规划结果存在缺陷. 部分研究[1-3]以移动式机器人的路径规划方法对自动驾驶汽车进行横向、纵向的跟踪预瞄,以跟随控制参数使得车辆沿指定路径行驶. 但其考虑的是车辆简化的二自由度模型,不能很好地评价操纵稳定性,且轨迹规划不一定光滑无突变.
近年来,对自动驾驶汽车轨迹规划方法致力于寻求轨迹曲率连续且安全无碰撞的参数化方法[4-6],如B样条曲线、β样条曲线、多项式等,建立轨迹优化评价函数对行驶轨迹进行择优. 大部分优化算法结合自动驾驶汽车的自身车辆系统[7-8],在保证车辆安全性条件下,对车辆的加速度、碰撞概率、行驶效率等多个性能指标进行优化,得到最优行驶轨迹. 由于传统算法简化的动力学模型不能兼顾操纵稳定性和舒适性,故搭建操纵稳定性、舒适性、换道效率为一体的评价目标函数[9-10]显得很有必要.
为了在轨迹规划中最大程度地反映实车性能,建立了车輛横摆、侧倾、侧向的三自由度动力学模型,得到车辆行驶轨迹和操纵稳定性参数,对其输出的轨迹进行参数化表达和识别,得到车轮转角输出规律. 在车辆具体驾驶场景下,对车辆制动性能进行分析,得到车辆轨迹规划安全域、曲率连续光滑的行驶轨迹. 这不仅保证了车辆的安全平稳运行而且能够通过车辆模型获得实时车辆姿态参数和操纵稳定性参数. 对比常规轨迹优化算法,提出并求解一种考虑车辆操纵稳定性、舒适性、换道效率为一体的轨迹综合优化方法.
1 考虑操纵稳定性的车辆模型
1.1 车辆动力学方程
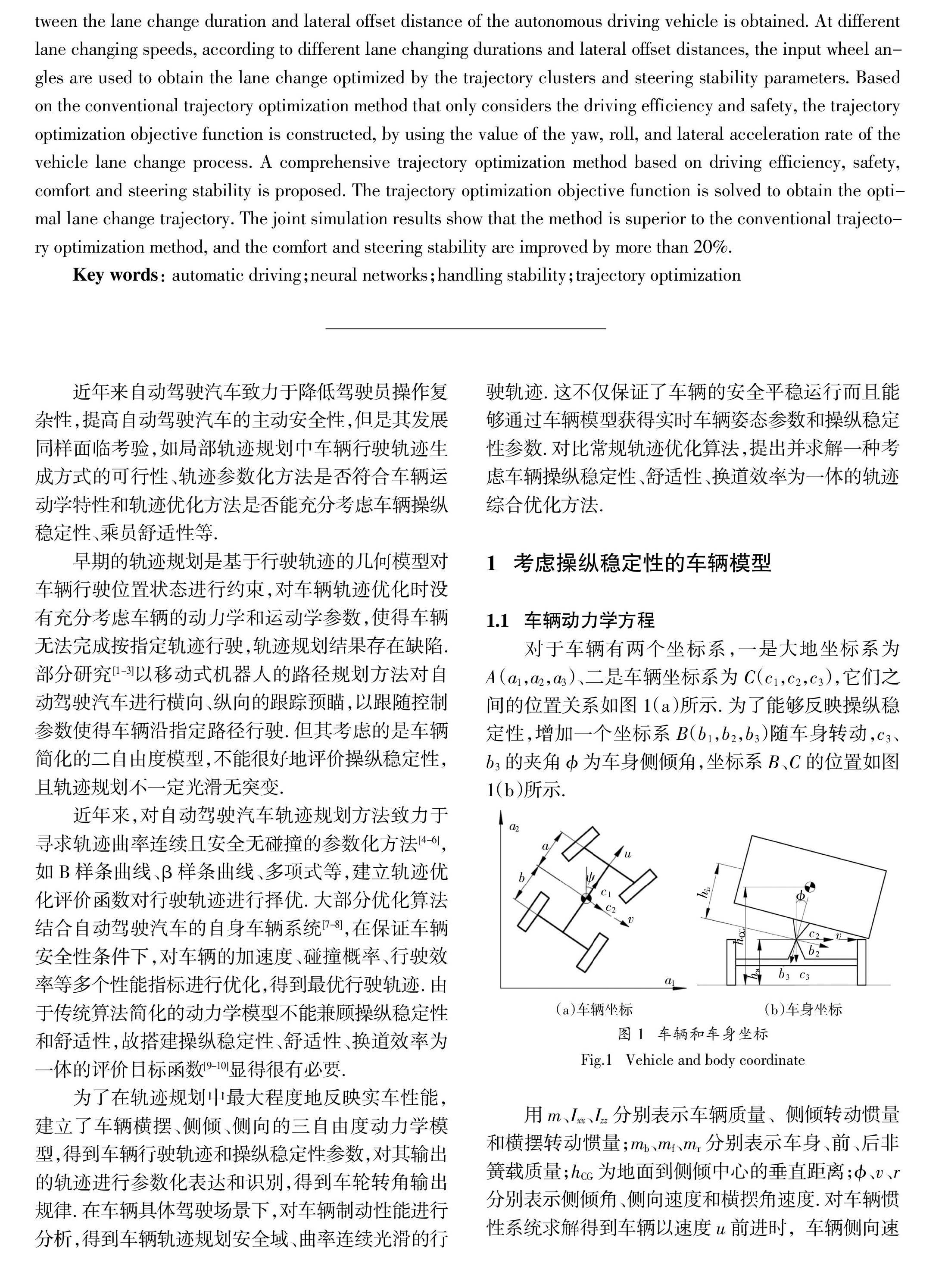
对于车辆有两个坐标系,一是大地坐标系为
A(a1,a2,a3)、二是车辆坐标系为C(c1,c2,c3),它们之间的位置关系如图1(a)所示. 为了能够反映操纵稳定性,增加一个坐标系B(b1,b2,b3)随车身转动,c3、b3的夹角?准为车身侧倾角,坐标系B、C的位置如图1(b)所示.
用m、Ixx、Izz分别表示车辆质量、侧倾转动惯量和横摆转动惯量;mb、mf、mr分别表示车身、前、后非簧载质量;hCG为地面到侧倾中心的垂直距离;?准、v、r分别表示侧倾角、侧向速度和横摆角速度. 对车辆惯性系统求解得到车辆以速度u前进时,车辆侧向速度v、横摆角速度r和车身侧倾角?准的动力学关系为:
(mb + mf + mr)(■ + ur)+(amf - bmr )■ +
mb hb■ = Fyf + Fyr (1)
(amf - bmr )(■ + ur)(Izz■ + Ixz■) = aFyf - bFyr )
(2)
Ixx■ + C?准■ + (K?准 - mb ghb)?准 +
mb hb(■ + ur) + Ixz■ = df Fyf + drFyr (3)
对方程进行数学变换可得关于[?鬃 v r ?准 ■]T矩阵表达式为:
0 0 -1 0 00 ■ a11 0 00 ■ a12 0 00 ■ a13 K?准 - mb ghb 00 0 0 0 -1 ?鬃vr?准 ■+
1 0 0 0 00 m amf - bmr 0 mb hb0 amf - bmr Izz 0 00 mb hb 0 C?准 Ixx0 0 0 1 0 ?鬃■■■ ■=
0 CαfaCαfdf Cαf 0δf (4)
式中:K?准、C?准均为常量,分别为悬架侧倾刚度系数和侧倾阻尼系数;df、dr分别为单位车身侧倾造成的前后轮侧向偏移量;Cα为轮胎侧偏刚度.
a11 = mu + ■
a12 = ■ + (amf - bmr)u
a13 = ■ + mb hu
令X1 = [?鬃 v r ?準 ■]T
E0 = [0 Cαf aCαf df Cαf 0]T
E1=0 0 -1 0 00 ■ a11 0 00 ■ a12 0 00 ■ a13 K?准 - mb ghb 00 0 0 0 -1
E2 =1 0 0 0 00 m amf - bmr 0 mb hb0 amf - bmr Izz 0 00 mb hb 0 C?准 Ixx0 0 0 1 0
则 E1X1 + E2 ■1 = E0 δf (5)
其中X1为反映车辆操纵稳定性参数的状态空间. 令U=δf为系统输入车轮转角,由A、B、C、D矩阵构造车辆三自由度车辆运动学模型状态空间变量Y1为:
■1 = AX1 + BUY1 = CX1 + DU (6)
其中:A=-(E2 )-1E1;B=(E2 )-1E0;C为5阶对角单位矩阵;D为五行一列0矩阵.
不同车辆参数和车速会不同程度地影响车辆操纵稳定性和舒适性,对比复杂的整车系统,三自由度模型能够充分反映不同车辆的操纵稳定性,而传统的二自由度模型不能充分考虑不同车辆的操纵稳定性能,进而无法客观评价乘员的舒适性.
根据车辆坐标和大地坐标关系转换,输出的航向角ψ、侧向速度v以及速度u之间的关系表示为:
■ = ucosψ - vsinψ■ = usinψ + vcosψ (7)
式中:X、Y为大地坐标系下车辆纵向和横向行驶距离,即为车辆行驶轨迹.
1.2 特定工况下模型操纵稳定性参数响应
在Simulink模块搭建自动驾驶汽车的三自由度动力学模型,同时在Carsim中输入车辆参数. 自动驾驶汽车参数见表1.
LD = uc·tlatδf = Ksin(ωt) X = uc·tY=-■sin■+■,t∈[0,tlat+td]
(8)
对模型输出轨迹进行拟合得到三自由度模型响应迟滞时间为0.22 s,同时拟合得到轨迹与标准正弦换道轨迹最大横向误差小于0.1 m.
2.3 换道轨迹识别
根据轨迹规划技术路线图(图10),为了获得具体驾驶场景下换道轨迹对应的车辆车轮转角变化规律,进而得到车辆行驶时的姿态参数和操纵稳定性参数,需要对换道轨迹进行识别[13-14].
■
图10 轨迹规划技术路线
Fig.10 Trajectory planning technical route
由换道轨迹参数化方程分析可得,输入一组车辆前轮转角就会得到一组换道轨迹,其中,换道的正弦车轮转角幅值为K,横向换道距离为YD;由于ω =2π/tlat,所以模型的输入是一组变化的车轮转角(关于K、ω的函数),输出是一组换道横向距离YD和纵向距离LD,故规律特征数据为K、ω、YD. 对特征数据进行分析,选择BP神经网络训练算法对轨迹进行识别,输入量为ω、YD,输出为车辆正弦转角变化幅值K.
由于车轮侧偏呈线性变化,侧向加速度不超过0.4g,正常换道持续时间约为1~7 s,可得到K、ω的取值范围分别为:
ω ∈■,2π K ∈ (0,0.611) (9)
将K以0.01 rad为间隔分为61组,以0.2 s的换道持续时间为间隔将ω分为30组,在车辆速度为10 m/s的条件下,令车辆模型输入不同的正弦前轮转角,循环调用模型,循环采集参数K、ω、YD,可以得到训练集1 830组,部分结果如表2所示,舍去YD ≥ 10 m的数据可得有效训练集为471组. 为了满足不同车辆速度换道工况,还分别采集了12 m/s、15 m/s的训练集,有效数据分别为374和307组.
表2 10 m/s车速下训练集部分数据
Tab.2 Partial data of 10 m/s
■
采集特征量后,搭建神经网络还需要考虑:训练函数算法、隐含层数量、神经元节点数、激活函数、输出函数、学習率等. 训练函数的选取直接关系到神经网络训练精确度,对轨迹识别起关键作用. 通过控制变量实验对最优算法进行筛选,选择u = 10 m/s时的训练集,训练网络隐含层为两层,结构为2-14-13-1,隐含层第1层激活函数选用双极S形函数、隐含层第2层和输出层为线性函数、训练误差为10-7、学习率为0.05、训练迭代次数为500次,为了达到训练函数快速收敛,对训练集进行归一化处理后,训练函数的结果如表3所示.
表3 训练函数的选择
Tab.3 Selection of training function
■
训练次数为训练集误差达到最小时的训练次数,当训练次数较少时,说明训练函数不能使训练集的误差减小,反而可能使误差增大,结合训练函数的回归相关性可得L-M算法和Bayes规范化算法都能较好地训练神经网络. 其中L-M算法,训练结果收敛性好,达到最小误差的迭代次数少.
在激活函数的选择上,线性函数能够减少训练的时间,但是非线性函数能够提高训练网络的精度,由于前面对训练集进行了[-1,1]的归一化处理,故对线性函数(调用字符‘purelin)和双极S形函数(调用字符‘tansig)的训练精度进行比较,运用控制变量法选择隐含层和输出层激活函数对神经网络进行训练,得到训练结果如表4所示.
表4 激活函数的选择
Tab.4 Activation function selection
■
由表4可知,隐含层采用双极函数、输出层采用线性函数的训练时间较短,回归相关性好. 因此,神经网络的训练函数隐含层第1层采用双极S函数,第2层采用线性函数,输出层采用线性激活函数.
类比以上的选择情况,通过控制变量法最终确定神经网络结构为2-14-13-1;训练函数为L-M算法;输入集激活函数选择双极S函数和线性函数,输出集激活函数选择线性函数;训练误差为10-7;学习率为0.05;迭代次数为500次. 网络训练误差如图11所示.
■
迭代次数
图11 神经网络训练误差
Fig.11 Neural network training error
从训练误差结果可得,BP神经网络能够很好地对车辆模型输出的轨迹和参数化轨迹进行识别. 当输入换道横向距离和换道持续时间为ω = 2π/tlat时,可得到换道时车轮转角输入,将车轮转角输入自动驾驶汽车三自由度模型获得操纵稳定性参数.
3 轨迹优化分析
3.1 轨迹优化目标函数搭建
参数化表达式中,LD为车辆换道的纵向前进距离,它直接影响自动驾驶汽车的换道持续时间;车辆的换道横向距离为YD,根据国家标准取3.75 m,故影响换道的变量为LD,令换道时间为1~7 s,当u = 10 m/s时,则LD∈(10,70).
在车辆安全域内生成60条换道轨迹,对搭建的BP神经网络模型进行仿真得到换道时车辆前轮转角的变化,将前轮转角输入到自动驾驶汽车三自由度车辆模型中,得到换道时车辆姿态参数和操纵稳定性参数;同理可以分别获得车速为u = 12 m/s、15 m/s时的评价参数.
评价车辆换道轨迹的好坏有很多方法[15],换道评价方法不仅影响车辆行驶安全,还影响车辆的动力学性能(如操纵稳定性、舒适性、行驶效率等). 换道时间长短反映汽车的行驶效率,而车辆的横向和纵向加速度不同程度地影响车辆性能;由于在换道过程中速度变化不明显,故常规轨迹优化方法选择换道持续时间和横向加速度来搭建轨迹优化目标函数. 常规换道轨迹优化函数变量分别为综合加速度和换道时间tlat,其中综合加速度表示为:
a = ■ = Aymax (10)
考虑变量权值,当评价体系的值取最小时,对应的换道轨迹为轨迹优化簇的最优换道轨迹,故常规轨迹优化目标函数为:
J1 = w1 A2 ymax+ w2 t 2 lat (11)
式中:Aymax为横向加速度;w1、w2均为评价变量的权重系数;tlat为换道持续时间.
常规轨迹优化目标函数中,其横向加速度为换道过程中的极值,并不能反映车辆在换道过程中的变化情况,存在局限性,且常规轨迹优化方法是针对二自由度车辆模型建立的评价体系,对汽车的操纵稳定性和舒适性缺少客观评价. 本文在常规轨迹优化评价算法的基础上对优化评价函数进行了改进,提出了基于车辆行驶效率和操纵稳定性的轨迹综合优化目标函数,其中变量为车辆持续换道时间、横向加速度变化率均值、侧倾角加速度变化率均值和横摆角加速度变化率均值. 这样既能充分考虑车辆的行驶效率,也能客观评价车辆的操纵稳定性、舒适性和车辆状态. 轨迹综合优化目标函数为:
J2 = w1 (■ + ■ + ■) + w2 t 2 lat (12)
式中:■、■、■分别为横向加速度变化率均值、侧倾角加速度变化率均值和横摆角加速度变化率均值的平方. 其表达式分别为:
■ = (2(■ymax - ■ymin)/t lat)2 ■ = (2(■max - ■min)/t lat)2 ■ = (2(■max - ■min)/t lat)2 (13)
3.2 车辆动力学约束条件
车辆在换道过程中,车辆与障碍物的距离需要满足最小安全距离模型,故安全距离约束为:
ΔL ≥ Ssafe,0 ≤ t ≤ t lat (14)
式中:ΔL為车辆与障碍物的纵向距离.
车辆在换道时,从主车道到目标车道行驶的过程中,需要对车辆的横向偏移距离进行约束,否则车辆可能会与其他车辆或障碍物发生碰撞.横向偏移距离约束为:
3.6 m ≤ YD ≤3.9 m (15)
车辆在换道过程中操纵稳定性参数影响车辆的舒适性和安全性,当横向加速度和侧倾角过大时,车辆会出现甩尾或侧翻风险. 因此,需要对车辆进行约束,根据对车辆侧倾角关于侧翻预警的研究[16]可得,加速度约束为:
ay ≤ 0.8g (16)
3.3 轨迹综合优化目标函数求解
对车辆换道速度分别为u = 10 m/s、12 m/s和15 m/s的评价参数进行采集,求解常规轨迹优化目标函数,得到不同权重比下、车辆最优换道轨迹所对应的横向加速度和最优换道时间,结果如图12所示.
■
权重比w2 /w1
图12 常规轨迹优化方法下最优换道时间和横向加速度
Fig.12 Optimal lane change time and lateral
acceleration under conventional methods
不同权重比分配影响换道过程中横向加速度与最优换道时间. 当评价函数取最小值时,得到的换道轨迹既为安全域中轨迹簇的最优换道轨迹. 根据不同权重比下得到的最优换道时间,通过神经网络识别得到自动驾驶车辆的正弦车轮转角变化规律,从车辆模型中输出不同的换道轨迹,如图13所示.
■
车辆换道纵向行驶距离/m
图13 不同权重比下的换道轨迹
Fig.13 Lane change trajectory under different weights
根据车辆动力学模型输出的操纵稳定性参数可以分析换道时间效率和汽车行驶性能. 以车速10 m/s为例,权重比越大,换道轨迹越陡峭,行驶效率越高,换道持续时间越短;权重比越小,轨迹越平缓,但换道持续时间增加,换道效率下降. 由图12可知,当权重比大于1时,换道效率增加,随之出现换道粗暴行为,车辆横向加速度较大. 当权重比为1时,不同车速换道轨迹如图14所示. 由图14可知,车辆换道过程速度越小,车辆换道轨迹坡度越大;速度越大车辆换道轨迹越平缓,车辆纵向换道距离也相对较大.
■
车辆换道纵向行驶距离/m
图14 权重比为1时不同车速换道轨迹
Fig.14 Different speed-changing track with a
weight ratio of 1
常规轨迹优化方法存在一定的局限性,采用轨迹综合优化方法进行求解,对采集的数据进行处理可得,不同权重比下轨迹综合优化算法最优换道时间和加速度变化率均值如图15所示. 与常规轨迹优化算法对比,轨迹综合优化算法下的车辆换道时间与综合加速度变化率曲线变化平缓,最优换道时间有所增加,车辆总体性能更加偏向于舒适性,操纵稳定性更好,有效地避免了换道粗暴行为.
■
权重比w2 /w1
图15 轨迹综合优化方法最优换道时间和加速度变化率均值
Fig.15 Mean optimization method for optimal trajectory
time and acceleration rate
当车速为10 m/s时,在不同权重比下,采用轨迹综合优化算法可得换道轨迹如图16所示. 由图13和图16可知,轨迹综合优化算法所得车辆换道轨迹更加平缓,车辆的操纵稳定性有所改善,更偏向舒适性.
由图15可得,为了避免换道粗暴和充分考虑操纵稳定性、舒适性和换道效率,取权重比为1.5时,不同车速的换道轨迹如图17所示,与常规轨迹优化
■
车辆换道纵向行驶距离 /m
图16 不同权重比下的轨迹综合优化方法的换道轨迹
Fig.16 Lane change trajectory of trajectory comprehensive
optimization algorithm with different weight ratio
■
车辆换道纵向行驶距离 /m
图17 权重比为1.5时不同车速换道轨迹
Fig.17 Different speed-changing track
with a weight ration of 1.5
算法的最优换道轨迹对比,轨迹综合优化算法更偏向于操纵稳定性和舒适性,同时换道效率也有保障,换道轨迹更加平缓. 所以,轨迹综合优化目标函数评价变量权重比取w2 /w1 = 1.5.
4 对比分析和评价
在保证车辆行驶安全的前提下,在Carsim- Simulink联合仿真平台对自动驾驶汽车不同速度工况执行换道操作,得到常规轨迹优化目标函数和轨迹综合优化目标函数的换道评价参数分别如图18和图19所示.
■
时间 /s
图18 在车速为10 m/s时车辆换道评价参数
Fig.18 Evaluation parameters for 10 m/s lane change
■
时间 /s
图19 在车速为15 m/s时车辆换道评价参数
Fig.19 Evaluation parameters for 15 m/s lane change
由换道评价参数可得仿真车辆换道持续时间和车辆横向加速度随时间变化关系,为了评价换道轨迹综合优化评价方法的科学性和时效性,以车辆换道持续时间差值与常规轨迹换道持续时间之比代表换道效率下降率;以车辆换道横向加速度最大值的差值和常规轨迹换道横向加速度最大值之比表征车辆操纵稳定性和舒适性改善程度,可得优化效果评价表达式为:
Δt ≥ ■ × 100% (17)
Δa = -■ × 100% (18)
式中:Δt为换道效率下降率;Δa为换道操纵稳定性、舒适性提升改善率;tlat1、tlat2分别为综合优化方法和常规优化方法换道持续时间;Ay1max、Ay2max分别为综合优化方法和常规优化方法换道过程横向加速度最大值.
对图18中参数进行运算可得换道效率下降率约为12.9%,换道操纵稳定性、舒适性提升改善率约为25%. 同理,对图19中参数进行仿真,可得换道效率下降率约为11.4%,换道操纵稳定性、舒适性提升改善率约为21.4%.
5 结 论
1)针对常规轨迹优化算法的车辆二自由度模
型,缺乏对操纵稳定性参数的评价,建立了考虑操纵稳定性的三自由度模型,可充分反映自动驾驶车辆的操纵稳定性和舒适性.
2)基于车辆三自由度动力学模型输出的轨迹,
运用BP神经网络算法对换道轨迹进行识别. 提出并求解得到了考虑主动安全性和舒适性、操纵稳定性和行驶效率的轨迹综合优化评价方法.
3)求解轨迹综合优化目标函数得到的最优换道轨迹更加平缓,其舒适性、操纵稳定性更好. 根据Carsim-Simulink联合仿真和常规轨迹优化方法比较可知:考虑操纵稳定性的轨迹综合优化方法优于常规轨迹优化方法,且在换道效率下降较少的情况下,自动驾驶汽车的舒適性、操纵稳定性改善率超过20%,具有良好的实用性和可靠性. 同时车辆前轮转角能够实现连续变化,没有阶跃突变,能够较好地控制车辆,为自动驾驶汽车换道控制提供帮助.
参考文献
[1] GLASER S,VANHOLME B,MAMMAR S,et al. Maneuver-based trajec- tory planning for highly autonomous vehicles on real road with traffic and driver interaction[J]. IEEE Transactions on Intelligent Transportation Systems,2010,11(3):589—606.
[2] CHEN B C,LUAN B C,LEE K. Design of lane keeping system using adaptive model predictive control[C]// 2014 IEEE International Conference on Automation Science and Engineering (CASE). New York: IEEE,2014:922—926.
[3] HUANG C,NAGHDY F,DU H. Model predictive control-based lane change control system for an autonomous vehicle[C]//IEEE Region 10 Conference. Tenco:IEEE,2016:3349—3354.
[4] 孙浩,邓伟文,张素民,等. 考虑全局最优性的汽车微观动态轨迹规划[J]. 吉林大学学报(工学版),2014,44(4):918—924.
SUN H ,DENG W W ,ZHANG S M ,et al. Micro vehicle dynamic trajectory plan with global optimality[J]. Journal of Jilin University (Engineering and Technology Edition),2014,44(4):918—924.(In Chinese)
[5] PEI Y L,WANG Y G,ZHANG Y. Microscopic model of automobile lane-changing virtual desire trajectory by spline curves[J]. Promet-Traffic and Transportation,2010,22(3):203—208.
[6] G?魷MEZ-BRAVO F,CUESTA F,OLLERO A,et al. Continuous curvature path generation based on β-spline curves for parking manoeuvres[J]. Robotics and Autonomous Systems,2008,56(4):360—372.
[7] COELINGH E,EIDEHALL A,BENGTSSON M. Collision warning with full auto brake and pedestrian detection a practical example of automatic emergency braking[C]//The 13th Int IEEE Conf on Intelligent Transportation Systems(ITSC). Funchal:IEEE,2010: 155—160.
[8] SOUDBAKHSH D,ESKANDARIAN A,CHICHKA D. Vehicle collision avoidance maneuvers with limited lateral acceleration using optimal trajectory control[J]. Journal of Dynamic Systems,Measurement,and Control,2013,135(4):1—12.
[9] 付骁鑫,江永亨,黄德先,等. 一种新的实时智能汽车轨迹规划方法[J].控制与决策,2015,30(10):1751—1758.
FU X X,JIANG Y H,HUANG D X,et al. A novel real-time trajectory planning algorithm for intelligent vehicles[J]. Control and Decision,2015,30(10):1751—1758. (In Chinese)
[10] DIB W,SERRAO L,SCIARRETTA A. Optimal control to minimize trip time and energy consumption in electric vehicles[C]//IEEE Vehicle Power and Propulsion Conference.Chicago:IEEE,2011:1—8.
[11] ZHANG S M,DENG W W,ZHAO Q R,et al. Dynamic trajectory planning for vehicle autonomous driving [C]//Proceedings of the 2013 IEEE International Conference on Systems,Man,and Cybernetics. Washington DC:IEEE Computer Society,2013:4161—4166.
[12] JULA H,KOSMATOPOULOS E B,IOANNOU P A. Collision avoidance analysis for lane changing and merging[J]. IEEE Transactions on Vehicular Technology,2000,49(6):2295—2308.
[13] 刘炀,汤传玲,王静,等. 一种基于BP神经网络的数字识别新方法[J]. 微型机与应用,2012,31(7):36—39.
LIU Y,TANG C L,WANG J,et al. A new method of numerical recognition based on improved BP neural network[J]. Microcomputer and Its Applications, 2012, 31(7): 36—39. (In Chinese)
[14] 李硕,汪猛. 基于换道起点和终点混合搜索算法的轨迹与行为特征研究[J]. 公路工程,2017,42(6):116—121.
LI S,WANG M. Lane-changing trajectoryand behavior analysis based on a mix searching algorithm for start point and end point [J].Highway Engineering,2017,42(6):116—121. (In Chinese)
[15] 張琳,章新杰,郭孔辉,等. 未知环境下智能汽车轨迹规划滚动窗口优化[J]. 吉林大学学报(工学版),2018,48(3):652—660.
ZHANG L,ZHANG X J,GUO K H,et al. Rolling window optimization for intelligent vehicle trajectory planning in unknown environment[J]. Journal of Jilin University(Engineering and Technology Edition),2018,48(3):652—660. (In Chinese)
[16] 朱颖,周炜,郭志平,等. 基于车辆侧倾角侧翻预警算法的研究[J]. 机械设计与制造,2011(2):52—54.
ZHU Y,ZHOU W,GUO Z P,et al. The study of vehicles rollover forewarning algorithm based on pattern recognition[J]. Machinery Design & Manufacture,2011(2):52—54. (In Chinese)
猜你喜欢
中国教育信息化·高教职教(2022年4期)2022-05-13
计算技术与自动化(2022年1期)2022-04-15
计算技术与自动化(2021年2期)2021-11-10
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
软件(2017年6期)2017-09-23
汽车周刊(2017年5期)2017-06-06
中国科技纵横(2017年4期)2017-05-16
移动通信(2016年24期)2017-03-04
电子技术与软件工程(2016年24期)2017-02-23
家用汽车(2016年9期)2016-11-04
