
矿用防爆柴油机无轨胶轮车检测系统建模
2020-04-07 10:15
计算机测量与控制 2020年3期
(陕西安技煤矿安全装备检测有限公司,陕西 榆林 719000)
0 引言
煤矿辅助运输是整个煤炭运输系统中不可或缺的重要组成部分,涉及煤炭以外的人员,材料,设备和煤矿石的运输,包括轨道辅助运输和无轨辅助运输。目前,世界上许多先进国家在煤矿辅助运输中采用无轨模式,总是由橡胶轮胎或履带运行,并由防爆柴油机或电池[1]提供动力。无轨车辆具有快速、灵活、少劳动力和无轨道限制的优点,从而带来了巨大的经济效益。虽然防爆柴油机无轨车辆符合煤矿的基本要求,但柴油机无法克服自身的缺陷:其排放物含有大量有害气体NOx,需要用新鲜空气稀释用于矿山生产安全。此外,柴油机的缺点如噪音,起动困难,易“沸腾”,气缸,活塞环易堵塞,气缸水等使维修成本高[2]。因此,我们必须找到并开发一种无污染、低故障率、良好动态性能的无轨车辆。煤矿车辆有专门的设计规范,低速限制可以使低速电动车在地面的缺点成为优势。现在关键问题是控制器的设计。本文控制器采用防爆设计,其方法用于矢量控制技术,效率高,可靠。
本文首先对无轨胶轮胎电动车的整体结构进行了分析,对它的驱动过程详细阐述。然后,本文重点分析了Matlab / Simulink中基于矢量控制理论,驱动系统各模块的建模过程。最后,经过有机集成,完成了驱动系统的整体模型,实现了模拟的动态性能。同时,我国煤矿井下交通拥堵现象时有发生。无胶轮胎车出现在地下运输巷道中,影响了地下运输系统的正常运行。为了实现合理的最优调度无轨橡胶轮胎车,对其输送线也进行了详细分析研究。
1 无轨橡胶轮胎电动车总体结构设计
电动车辆与燃料车辆的不同之处主要在于驱动系统。电动车辆的结构是灵活的。虽然大多数借鉴了成熟的燃料汽车系统,但电动汽车在能量传递,系统布置,辅助能源以及尺寸和形状方面都有其自身的特点。本文将无轨胶轮胎电动车系统划分为三个子系统,如图1所示,如电驱动子系统,能量子系统和辅助控制子系统[3]。无轨橡胶轮胎电动车的驱动系统由电池组,交流牵引电动机,控制系统(包括传感器,控制器和电源模块等),机械减速器和传动装置组成。

图1 无轨橡胶轮胎电动车的驱动系统
如图1所示,电驱动子系统和能量子系统构成电动车辆的运动控制系统(也称为传动系),其是用于传递能量并获得车辆的运动能力的所有部件的总称。运动控制系统中的电机控制器也是本文的目的,主要用于将电能转换为机械功率的速度和大小。为了控制驱动电机的速度和扭矩,电机控制器接受来自加速踏板,制动器或“P,D,R,N(停车,驱动,反向和空档)”的这些信号,这将是通过信号处理输入到电源模块,控制电源电路的输出通过机械传动装置驱动车轮[4]。控制算法采用矢量控制方法,对感应电机具有更高的反馈跟踪性能。
2 仿真系统的研究与建立
2.1 无轨橡胶轮胎电动汽车矢量控制系统建模
本研究以转子磁场为导向,在两相同步旋转坐标系[6]中设计了转子短路的三相笼型异步电动机的数学模型:

图2 Matlab/Simulink中交流感应电机驱动系统的矢量控制模型
(1)
其中:uM1,uT1分别是定子电压励磁分量和转矩分量,Ls,Lr分别是定子电感和转子电感,r1,r2分别是定子电阻和转子电阻,iM1,iT1分别是定子电流励磁分量和转矩分量,iM2,iT2分别是转子电流励磁分量和转矩元件,Lm相当于定子和转子的磁化电感,ωs是滑差交流电动机的频率,ω1是定子的角频率,p是微分算子。矢量控制的最终结果是实现定子电流的分解和转子磁通与电磁转矩的解耦。矢量控制器MOD设计了交流异步电动机矢量控制的思想。在同步旋转坐标系中,模块的输入是转子参考磁通Ψ2和参考电磁转矩Te,并且输出是磁通分量IM1和转矩分量IM1。从电磁转矩方程(2)和转子磁通方程(3)出发,计算出Tion模型。
电磁转矩公式:
(2)
转子磁通方程:
(3)
坐标变换模块,三相静止坐标系向两相静止坐标系再向旋转坐标系的转换方程是基于变换前后磁动力和总功率不变的原理:
(4)
矢量控制的关键是三相异步电动机的磁场定向.只有准确地知道转子磁链矢量在空间中的位置,才能使磁链实现沿转子场定向的坐标和矢量控制。本文采用通量计算的方法,将其称为直接场的方法。基于方程(3)和(5),可以推出将实际转子磁链空间矢量和滑动频率的模型。
(5)
逆变器和感应电机模块。逆变器是直流到交流变压器,脉冲宽度调制(PWM)技术由逆变桥,控制逻辑和滤波电路组成。异步电机模型选自SimPowerSystems in matlab / simulink 。利用IGBT逆变器,它构成了由电流控制的电压源逆变器模块。
迟滞电流控制模块。与参考值和定子三相电流的测量值相比,差值将通过迟滞比较器发送,其中输出逻辑信号将确定逆变器IGBT电子开关是否应该打开或关闭。通过这些功能模块的有机集成,可以在Matlab / Simulink中建立交流感应电机控制系统的仿真模型,并采用双闭环控制算法实现。驱动控制系统的整体模型如图2所示。
2.2 不同类型运输线路的分析与研究
可采用一套分段线路将运输巷道简化成一组,分离片段的基本组成,主要类型如下。

图3 第一类线
第一类线的定义如下:A和B是线路的两端,它们可以实现大车和小车相遇时避免或调车;连接A和B的线路有长度,Dist 在地下巷道中,节点之间的性能是不一样的;A和B之间的线上方的双箭头表示这部分中的小车允许相反的交通操作。

图4 第二类线
第二类线的定义如下:A和B是线路的两端,它们可以实现大车和小车相遇时避免或调车;连接A和B的线路有长度,在地下巷道中,节点之间的位置是不一样的;A和B之间的直线上方和下面的单向箭头表示,本节中的小型汽车只允许单程交通。
以下定义适用于第三类线路:B为三条交通线(三线在同一层级)的交叉点;三条线路中的每条线与第一类线路具有相同的定义。
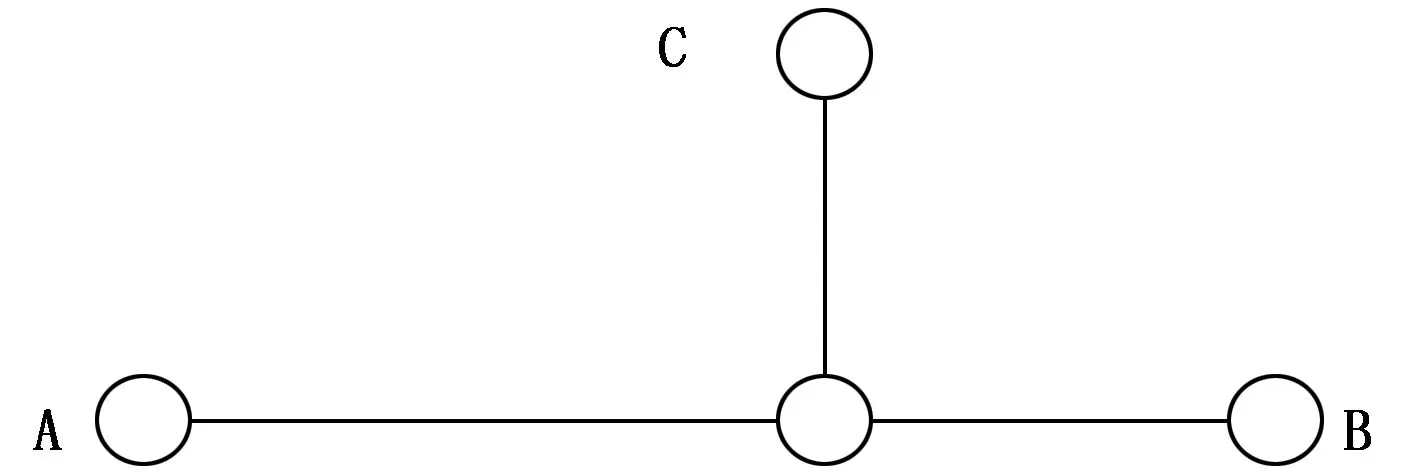
图5 第三类线
第四类线的定义如下:它代表巷道末端的码或调车点。

图6 第四类线
3 仿真结果与分析
3.1 电机驱动的仿真
该实验假设无轨电动车辆在水平面上沿着直线行驶,其中倾斜角为零。通过电动车辆方程[7],可以在表1所示的模拟中设定电动车辆的参数。电动机的参数如表2所示,基于实际运行状态的无轨橡胶轮胎车辆,需要经常空载启动,制动和负载启动,制动。它应始终在煤矿中以低速运行。定义转子参考磁通Ψ= 8,速度PI调节器P=100,I=1。

表1 无轨电动车辆的参数
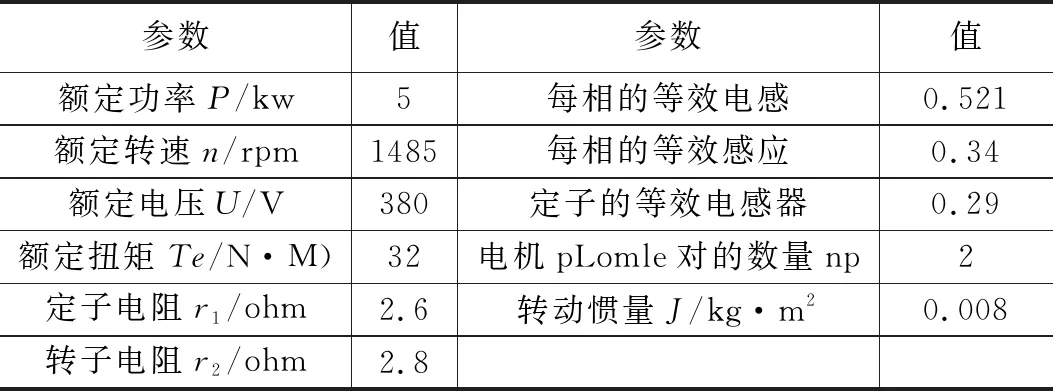
表2 电动机的参数
最初给定初始转速ω=100 rad/s,在0.2 s稳定空载运行后,驱动控制系统以20 N·m负载运行。图7显示了这些电机仿真曲线。
从这些电动机模拟曲线可以看出,初始加速过程中的系统具有较大的起动电流峰值,并且由于旋转磁场的建立,电磁转矩迅速增加,从而可以加速电动机。
在加速过程中,没有过冲,上升时间小于0.05 s,同时速度的稳态误差约为0.2%。当ω达到100 rad/s时,电磁转矩跳至零并保持不变。在0.2 s时,电磁转矩迅速跳入给定的负载值,其恢复时间约为0.03 s。因此,电流也将增加并保持稳定。驱动控制系统具有完善的抗干扰能力。所有这些都可以充分说明控制定子电流的矢量控制方法能够有效地控制电机转矩,从而进一步控制电机转速,提高转速性能。最后,高性能实现了闭环控制。

图7 交流异步电动机的仿真曲线
3.2 无轨橡胶轮胎运输线规划方法研究
这里我们定义的命名原则如下:从第一个端点开始,数字从1开始。当遇到一个交叉点时,端点数变成两位数。遇到时g下一个交叉点,端点数变成三位数,以此类推,如下所示。使用这种端点命名方法,我们可以清楚地了解地下交通线路图和快速路,y找到端点位置,如图8所示。

图8 定义的命名原则
根据运输巷道的命名规则,具有相同数字号的运输巷道可以与其它运输巷道进行分类。因此,运输巷道规划可以由数字节点决定。方法:1)根据运输任务的要求,找出目标点;2)分析起点,确定目标点数相同。 是否运输道路标高。如果它们是相同的级别,则确定它是否处于相同的级别编号。如果是增加或减小的起点,则找到目标点。 计划运输线路,如果找不到共同点,将一个公共点切换到另一个水平车道。找出与目标相同的水平运输巷道,然后逐个搜索,找出目标点。3)将过线从起点连接到目标点,完成运输巷道线路的规划。
另外,可以使用元胞自动机办法对路线进行模拟。
3.3 元胞自动机对路线进行预测
3.3.1 元胞自动机(CA)
元胞自动机又称细胞自动机,可以简单的理解为以一个方块作为一个元胞,制定与它临界的元胞发生关系的法则。早期John Horton Conway所提出的生命游戏就是一个元胞自动机,后来再由Stephen Wolfram 在A NEM KIND OF SCIENCE一书中详细介绍。在此书中没有用一个数学公式来证明其中的定理,证明过程全都由画图完成。并且Wolfram本人也在书中说明:“完全打破现有的学术体系,按照完全不同的原理来理解自然界。”这也是元胞自动机的亮点,虽现在争议较大。不过元胞自动机在解决复杂性科学上的问题发挥了它举足轻重的作用,这是大家都公认的。
元胞自动机具有如下特点:①胞分布在按照一定规则划分的离散元胞空间上;②系统的演化按照等间隔时间分步进行,时间变量取等长的时刻点;③每个元胞都有明确的状态,并且元胞的状态只能取有限个离散值;元胞的下一时刻演化的状态值是由确定的转换规则所决定的;每个元胞的转换规则只有局部领域内的元胞状态所决定。用数学语言所描述就是A=(L,d,S,N,f),A代表一个元胞自动机系统,L表示元胞空间,d表示元胞自动机内元胞空间的维数,是一正整数。S是元胞有限的、离散的状态集合。N表示某个邻域内所有元胞的集合。f表示局部映射或局部规则。
元胞空间可以理解为一个方块,每个方块都有它的元胞状态,可以表示为{0,1},{生,死},{烧着的树,没烧着的树,空地}或{a,b,c,d}领域现在主要介绍二维的元胞自动机领域,通常情况下二维领域主要有以下三种:①von neuman型;②moore型;③margolus型。其中von Neuman型只有上下左右四个领域,moore型是有周围8个领域 Moore型还可以由周边第二圈乃至于第三圈的领域。而margulous型是它每次将2*2的元胞块做统一处理,而其他两种领域类型中,是每个元胞块单独处理。当然还有一维的领域或者更高维度的领域,在此我们只讨论和城市空间结构及其拓展的方面,因此只需讨论二维领域即可。

图9 元胞空间
元胞状态的更新规则就好比在一个有元胞组成的世界中制定那个世界的物理规则。其实在元胞自动机萌芽时期,诺伊曼想要研究自复制机然而在他那个时代,生命科学还没有完全发展起来,后来Conway就向诺伊曼介绍了元胞自动机,并且让他制定其中的法则来为那个世界创造“生命”并研究自复制。于是生命游戏的概念就在那时被提了出来。那么状态更新规则就是指根据元胞当前状态及其领域内元胞的状态决定下一刻时该元胞的状态的转移函数,可以写为:
(6)

3.3.2 ELM-CA模型
在此的介绍就由王鹤,曾永年(以下简称王)做过的城市用地转换实列来说明。
在王的模型中,元胞状态为{城市用地,耕地,林地,水域,裸地},转换规则为河流,湖泊等水域不发生转换,城市用地不向非城市用地转换。在其中非城市用地向城市用地转换的概率为P,P由以下三种因素决定:①城市用地潜力PELM;②元胞领域影响Pneighbor;③随机因素Prandom。
P=PELM·Pneighbor·prandom
(7)
其中:PELM可以用极限学习机来表示,因此将非城市用地(耕地,林地,裸地)转化为城市用地的潜力。每一个元胞单元有n个驱动因子,这些驱动因子由空间距离变量(离城市的距离),自然属性变量决定。对应着输入层的n个神经元,而极限学习的输出层就对应于转换潜力。
(8)
领域影响因素:
(9)
其中:Si,j代表着领域坐标(i,j)的状态,con是条件函数,随机因素是一个函数值介于0~1之间的随机变量。
结果如下:
随机慢化概率p=0.2;密度ρ=13.3 veh/km/lan(0.1)。

图10 随机慢化概率p=0.2;密度ρ=13.3 veh/km/lan(0.1)预测结果
4 结论
本文提出并阐述了无轨橡胶轮胎电动汽车的基本结构及其驱动系统的控制算法。这些矢量控制统的各个模块都是用Matlab/Simulink构建的。通过模块的集成,完成了无轨电动车驱动系统的仿真模型。结果表明,矢量控制方法具有良好的解耦能力,能够实现交流电机快速稳定的速度闭环控制。此外,它为煤矿辅助运输以及电动汽车的发展开辟了一条新的思路,并提供了可靠的理论价值。
猜你喜欢
煤炭科学技术(2022年7期)2022-09-22
煤(2022年9期)2022-08-31
导航定位学报(2022年4期)2022-08-15
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
华北科技学院学报(2022年2期)2022-06-08
防爆电机(2022年2期)2022-04-26
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
电机与控制学报(2018年9期)2018-05-14
