
爆胎车辆应急自动制动系统稳定控制的策略研究
2020-04-22 16:27许晓秦任朝阳
微型电脑应用 2020年3期
关键词:实现路径
许晓秦 任朝阳
摘 要:在完成轨迹控制评价指标构建的基础上,对不同控制器控制爆胎车辆轨迹的效果进行了研究和分析,静态 PID 控制器通常基于某一车速建立导致对在其他行驶车速下的爆胎车辆行驶控制效果降低。为有效提升爆胎车辆的轨迹控制效果提出增益可变 PID 控制器。该控制器根据不同的爆胎车速标定事先获得相关参数,将该控制方案应用于轨迹控制仿真实验中,实现了对爆胎车辆行驶轨迹的有效控制过程,恢复到原路径时只出现了较小的偏移。
关键词:爆胎车辆; 自动制动系统; 轨迹稳定控制; 实现路径
中图分类号: U463.5
文献标志码: A
Abstract:Based on the completion of the construction of the trajectory control evaluation index, this paper studies and analyzes the effect of different controllers in the trajectory control of the blasting vehicle. The static PID controller is usually based on the establishment of a certain speed, which leads to failure if the driving speed at other driving speeds. In order to effectively improve the trajectory control of the flat tire vehicle, a gain variable PID controller is used. The controller obtains relevant parameters in advance according to different tire speeds, and applies the control scheme to the trajectory. In the control simulation experiment, the effective control process of the trajectory of the puncture vehicle is realized, and only a small offset occurs when the original path is restored.
Key words:Puncture vehicle; Automatic braking system; Trajectory stability control; Implementation path
0 引言
不断增加的汽车保有量在方便日常出现的同时,带來了频发的交通事故,引发汽车交通事故的原因较多多,其中爆胎危险性极高且难以预测,处于高速行驶状态下的汽车一旦出现爆胎将会对汽车的行驶稳定性造成严重影响,进而影响了车辆驾乘人员的生命和财产安全。爆胎后的汽车会出现横摆、偏航(严重时会出现甩尾、激转等),驾驶员在心理紧张尤其是在驾驶经验不足的情况下难以做出准确有效的反应采取了过度甚至错误的操作,进而易引发严重的交通事故,因此目前爆胎车辆稳定性控制已经成为领域内的研究重点之一。
1 现状分析
目前通过将辅助安全装置安装于轮胎上(包括自我密封型、辅助支撑系统型轮胎)以增加轮胎强度已成为用于解决爆胎引发安全问题的解决方案,避免了爆胎车辆严重偏航情况的发生;通过将控制措施施加于爆胎车辆上以实现对车辆稳定停车的有效控制过程(即从控制角度入手),如BMBS(吉利集团提出,一种爆胎监测与制动系统),具体通过改进轮胎压力监测系统(仅在胎压异常时发出预警信号)实现,在爆胎瞬间即迫使车辆制动减速(通过强大制动力的自动提供实现),自动使车辆处于受控状态。但这两种解决方案无法从根本上解决安全问题。目前国内爆胎控制子系统的研究与开发大多基于汽车稳定性控制系统完成,具体通过采用差动制动方法完成对车辆横摆运动的调整,通过线性二次型调节器算法的使用完成了控制器的设计,加权矩阵的选用需以性能要求为依据,从而确保爆胎车辆的操纵稳定性(不偏离航线),但控制器的在线实时计算过程极易增加优化时间,控制器受到固定不变的权系数的限制导致难以根据具体爆胎工况完成对系统性能的及时调整。可通过数据表的建立(以实验数据为依据)实现最优横摆控制力矩的查表获取,以简化计算过程。例如,通过将状态参考器引入到神经网络驾驶员模型中实现对爆胎车辆响应特性变化情况的及时掌握;针对爆胎车辆以横摆角速度作为控制对象,通过模糊控制方法的使用实现转向主动控制过程,但对车辆的质心侧及轮胎侧偏角的重视不足,在需进一步完善爆胎车辆转向系特性[1]。本文在现有研究的基础上,对主动安全控制系统进行了完善,以期提升自动制动系统稳定控制性能。
2 爆胎车辆安全行驶评价指标
轮胎在过高的车速下行驶会加速其损伤,降低了轮胎的抗压性,成为爆胎事故的直接诱因。具有突发特点的爆胎在实际发生时会极大的改变轮胎的力学特性(包括径向和切向),进而影响到车辆的稳定性和安全性,尤其是发生在高速公路上的爆胎车辆发生翻车事故的概率较大。现有轿车的布置形式以前置前驱前转向为主,车辆转向轮爆胎时会严重影响驱动、转向和制动性能,传统底盘集成主动安全控制系统并不能够对爆胎汽车进行主动控制。比例、积分、微分(PID)控制是实际普遍运用的控制规律,非线性的爆胎车辆模型的主要特点在于时变性、不确定性较高,实施控制时受到无法完全精确掌握爆胎车辆结构极参数的影响导致控制理论相关技术的有效应用[1]。本文采用爆胎车辆模型(由veDYNA 软件提供)对爆胎工况进行模拟,将方向盘转角通过变增益 PID 控制器进行规划,完成及时适当的主动转向操作过程,使汽车沿道路中心线行驶并自动减速以确保爆胎车辆稳定行驶。
2.1 爆胎车辆运动状态分析
胎内气体在发生爆胎后迅速放尽,会显著改变轮胎的力学特性,相比于正常胎压轮胎的滚动阻力系数在零胎压条件下会增大20 多倍,径向、侧偏、纵滑及侧倾的刚度显著低于正常值,车辆的运行状态及稳定性会受到这些变化的力学特性的直接影响,如行驶汽车轮胎的滚动阻力会随爆胎的滚动阻力系数的增大而急剧增大,相比于同轴的正常车轮速度爆胎的滚动速度会降低,造成同轴两侧滚动阻力不同,爆胎车辆在此差值作用下会产生一个附加横摆力矩,进而导致车辆向爆胎车轮侧偏航。爆胎后的脱圈阻力同样急剧降低,驾驶员的操作不合理会增加轮胎脱离轮辋的发生概率,轮胎侧向力受到触地刚性轮辋的影响急剧增大,是引起翻车的主要诱因。以汽车左前轮为例,在不施加控制措施的情况下对其发生爆胎后的动力学响应情况进行仿真實验研究,以便直观说明车辆运行状态受到爆胎性能改变产生的影响,使用仿真软件veDYNA对仿真工况进行设定,汽车行驶于直道上附着系数为0.8,行驶速度分别为 60、120 km/h,25 s时发生爆胎,仿真结果表明:车辆在每小时60 km的车速下爆胎发生5 s时达到了10 m的侧向位移,此时爆胎车辆极易驶入相邻车道,质心及四轮的侧偏角变化较小,由爆胎引起的附加横摆力矩使车辆偏向爆胎侧,在爆胎瞬时侧向加速度即到达峰值,爆胎后 1 s内呈现不稳定变化趋势的横摆角速度即达到正向最大值;爆胎后不采取控制措施的车辆的自动减速主要借助滚动阻力实现,爆胎车辆的各性能指标在不同爆胎车速下呈现出基本相同的变化趋势,过大的爆胎车速则会显著增加性能指标的幅值[2]。车辆在每小时120 km的车速下爆胎的性能指标幅度会增加2倍左右,会发生更大的偏航,即行驶稳定性同爆胎车速成反比。
2.2 安全控制评价指标
本文以爆胎车辆相关理论及运动状态为依据,对PID参数进行调整(根据爆胎车辆安全行驶评价指标),爆胎车辆稳定行驶的性能指标表征为:爆胎轮胎超过3°的质心侧偏角会极大的增加驾驶员的操纵难度视为车辆不稳定,爆胎轮胎超过4°侧偏角会导致轮辋同轮胎分离并触地即视为翻车,变化较大的横摆角速度(呈现正负近似阶跃变化)易导致车辆甩尾的发生。确保爆胎车辆的基本安全在于仅出现轻微的偏航且不会驶入其他车道(包括不撞击护栏)。四个车轮及质心的侧偏角在车辆爆胎后不采取控制措施时的变化较小,爆胎不会同轮辋分离,翻车风险较小,可保持一定的行驶安全性[3]。车身较大的偏航是爆胎车辆面临的首要危险,易导致车辆撞击护栏或驶入相邻车道,不稳定的横摆角速率则增加了爆胎车辆的侧滑或甩尾发生的概率。本文针对爆胎车辆以PID 控制参数的确定(根据道路中心线同车辆间的偏差)作为主要控制任务,以确保爆胎车辆稳定行驶。在高速公路上车辆爆胎时会导致车辆偏航,为有效解决这一问题,本文主要对爆胎车辆应急自动制动系统稳定控制的策略进行了研究,并对爆胎车辆轨迹控制进行了仿真研究。
3 爆胎车辆轨迹控制及仿真
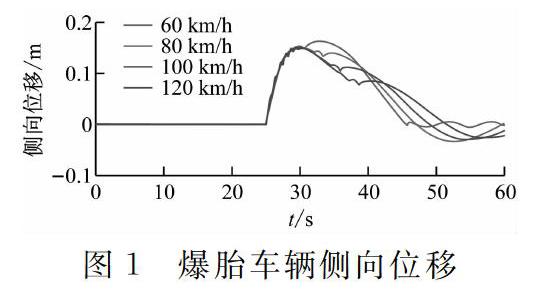
本文爆胎控制系统在监测系统发现爆胎事故时立即被触发进入到工作状态,并以自动行使控制权的方式为主,以不制动且依靠滚动阻力自动减速作为爆胎控制策略,仿真环境下对应的制动信号及油门踏板信号置零。车辆转向系统在接收到由控制器规划的方向盘转角后(根据道路中心线同车辆间的偏差完成),再通过控制器执行车辆控制动作,保持车辆行驶于原车道中心线上,同时使车辆运行状态满足上文所述的约束条件。具体仿真路况和工况设置为:行驶于附着均匀的直路上的车辆(附着系数为0. 8)在行驶 25 s时(此时已达到预期速度并保持匀速行驶)发生爆胎,爆胎车速为60 km/h,进行静态PID爆胎控制实验。对于PID控制器,比例环节系数由P表示,微分环节的比例系数由Pd表示,积分环节的比例系数由Pi表示,结合控制目标和试凑法完成控制器控制参数的确定P=2、Pi=0. 2、Pd=5,仿真控制结果为:最大偏移量为0.17 m(处于安全范围),车辆运行轨迹趋在爆胎20 s后可沿道路中心线行驶;侧向加速度、横摆角速率、质心侧偏角的变化幅度以及轮胎侧偏角较小,方向盘转角未发生激转(由控制器规划),可确保车辆稳定行驶,爆胎不会与轮辋分离。同未采取任何控制动作的爆胎车辆仿真结果相比,各项行驶稳定性指标通过使用PID控制器均实现了较好的控制干预优效果(控制过程平稳),使给定的控制目标得以有效实现[4]。在车辆以60、80、100、120 km/h的爆胎车速行驶时采用本文的静态PID控制器对运行轨迹较小控制,侧向位移仿真结果如图1所示。
爆胎车速同控制指标幅值大小成正比,相比于车辆在60 km/h车速下发生爆胎的控制效果,其他速度下的车辆侧向位移仿真曲线的动态特性稍有下降,侧向位移的上升段在较高爆胎速度下出现抖动并增加了控制器动态调节时间,车身出现小幅、快速摆动,爆胎车辆在侧向位移回落后仍存在不稳定趋势(沿道路中心线左右摇摆)。
4 变增益PID轨迹控制及仿真
车辆通常以60~120 km/h的速度在高速公路上行驶,对此速度区间的车辆通过使用试凑法以控制目标为依据完成轨迹控制参数的标定,车辆爆胎包括发生在直路和弯路上两种工况。针对可能的爆胎车速及道路环境,建立了不同爆胎车速基于直路和弯路下的参数表,具体如表 1、表2所示,据此决定相应的PID控制参数,通过使用此种基于参数MAP的控制器可使PID控制器的适应性得以显著提高[5]。
4.1 直线路况
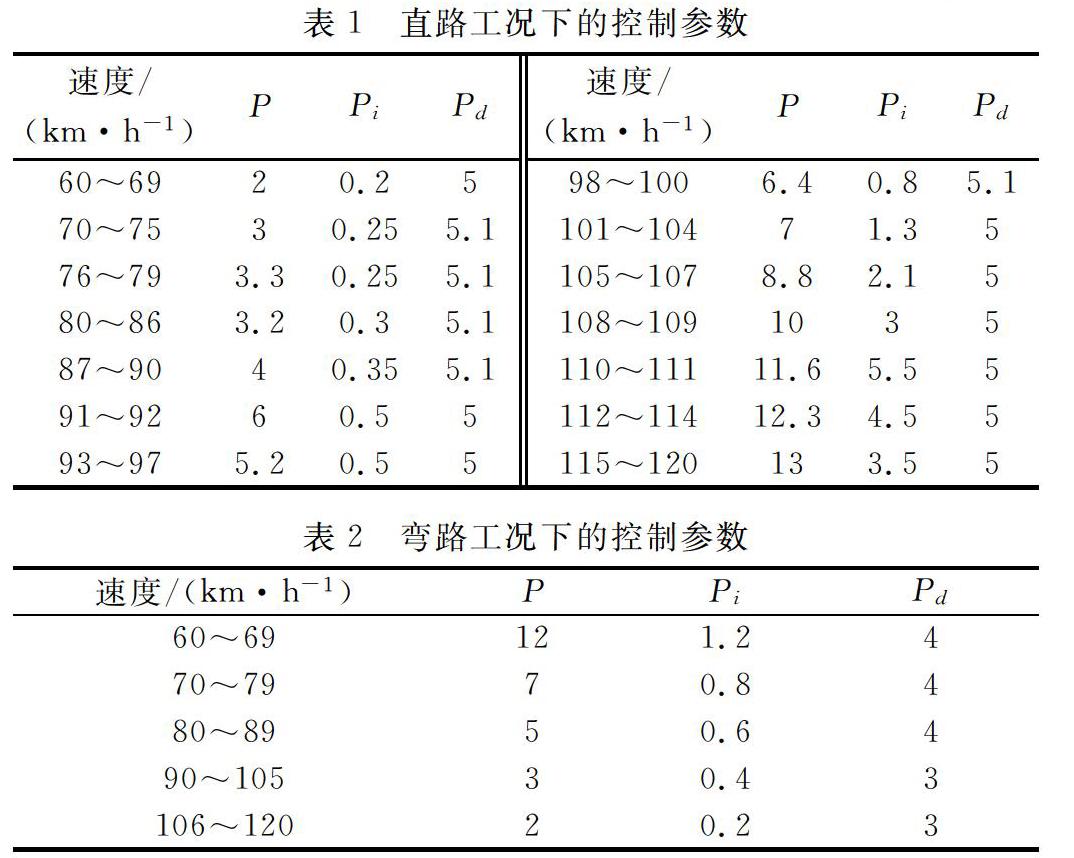
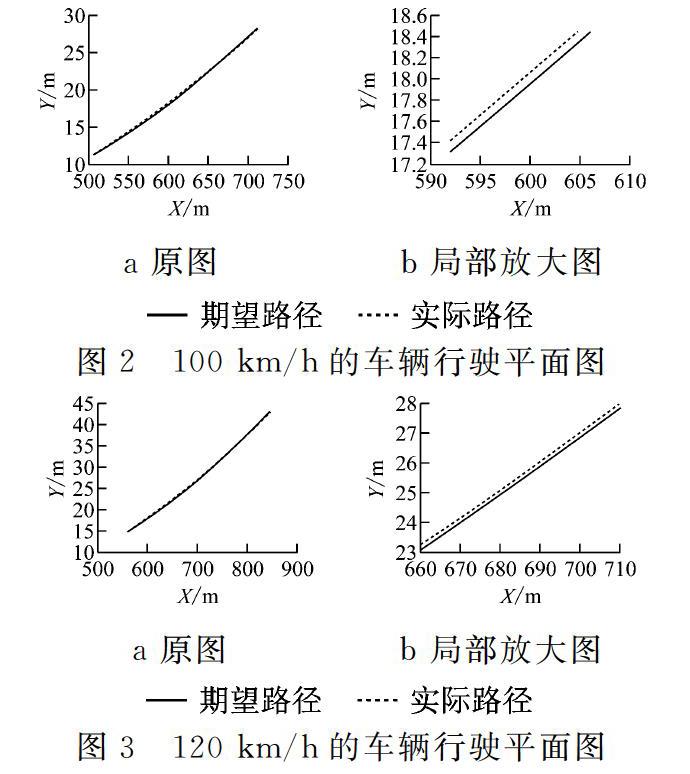
对基于变增益 PID 控制器的轨迹控制进行仿真实验,直线路况实验参数设置为(符合高速公路国家标准):车辆分别以80、100、120 km/h的速度行驶,在25 s 时发生左前轮爆胎(此时达到预期速度并匀速行驶),道路附着系数为0.8,速度为100、120 km/h的车辆行驶平面图如图2、3所示,结果表明车辆其余指标均在安全行驶指标范围内,偏航幅度受到不同爆胎车速的影响较小并能够在原车道上行驶,没有侧翻和轮辋触地的危险。但控制器在爆胎车速不断增加的情况下增加了调节和控制难度及时长,达到稳定状态前性能指标震荡幅度及次数均增加,侧向位移上升段出现抖动,如需同时控制爆胎车辆的偏航幅度,降低震荡次数难以只通过改变PID控制参数实现。爆胎车速增加时会提高方向盘转角的幅值及频率(由PID 控制器规划)[6]。
4.2 曲线路况
为进一步验证本文控制方案的车辆轨迹控制效果,使用veDYNA完成了路径和行驶工况为弧度为90°的左弯曲线路段的仿真验证(符合高速公路国家标准),附着系数为0.8,爆胎车辆以100、120 km/h的车速行驶在25 s 时左前轮发生爆胎,仿真结果表明行驶轨迹同期望路径基本吻合,即该PID 控制器具有较好的控制效果,在 PID 控制器的作用下车辆向左右两侧反复横摆震荡(震荡时间同爆胎车速成正比,2~7 s),车身在2 s后横摆运动消失恢复稳定,位于質心侧偏角的线性区(质心侧偏角不超过3°),爆胎侧偏角在安全范围内,证明车辆爆胎后行驶稳定。方向盘转角未发生激转,确保车辆在转向时不发生侧翻,车辆借助滚动阻力能够平稳降速。控制器能够通过设置相应的 PID 控制参数(以具体的爆胎车速及道路环境为依据查表获取)进行主动安全控制车辆行驶轨迹确保稳定行驶,相比于静态PID控制器本文控制器的控制效果得以有效提升。为保证主动控制的及时有效,变增益 PID 控制器在车速或道路环境传感器失效的情况下会先预设的参数模式进行自动切换[7]。根据目前单片机电子技术的发展情况可保证迅速可靠的查表过程(采用现有并行查表技术),从而及时有效的确保爆胎车辆安全主动控制过程,但考虑到道路环境的多样性,本文的弯道控制参数表受到预先指定路况的限制难以获得全面的控制效果,需逐步将各类道路工况纳入到考虑范围对,对影响控制器的参数(包括车型、轮胎类型、载质量、路面条件等)及自适应能力进行深入研究。
5 总结
车辆爆胎后发生改变的轮胎性能参数会对车辆行驶方向及稳定性产生直接影响,爆胎车辆车身剧烈的偏航的危险极大(在不干预的情况下处于直行状态的车辆发生爆胎不一定会失稳),为此本文对爆胎车辆应急自动制动系统进行了优化,通过将MAP机制建立在 PID 控制结构上完成了一种变增益 PID 控制方案的设计,车速和爆胎道路环境同 PID 控制参数间的关系通过查表获取,将该方案应用于爆胎控制仿真实验,可在爆胎时对方向盘转角进行自动合理规划,在偏离理想运动状态时及时纠正,从而在面对不同车速及道路环境发生爆胎情况下的 PID 适应性得以显著提高。
参考文献
[1] 江振飞,徐红光,蒋素琴,等.汽车轮胎爆胎分析与原因鉴定研究[J].机械制造,2018(9):17-20.
[2] 许志超,周福强,危银涛,等. 商用车轮胎通过噪声与温度、速度和花纹关系的实验研究[J]. 橡胶工业, 2017(11):655-659.
[3] 张颖文,王国林,周海超,等. 使用因素对滚动轮胎振动特性影响的有限元分析[J]. 橡胶工业, 2018(11):1306-1312.
[4] Christian Jacobi, Constanze Gahleitner, Henning Bier, et al. Chemoradiation and local recurrence of head and neck squamous cell carcinoma and the risk of carotid artery blowout[J]. Head & Neck,2019(8):3073-3079.
[5] Kornelia Kreiser, Isabell Grber, Claus Zimmer, et al.Stent grafts in patients with carotid blowout syndrome: Outcome and antiplatelet therapy in preventive versus emergency cases[J]. Head & Neck,2018(11):2521-2527.
[6] 李冰林,徐晓美,吕立亚,等.基于分数阶微积分的爆胎汽车横向稳定性控制[J].安全与环境学报,2018(6):2219-2224.
[7] 蔡永周,曾繁林,欧阳俊,等.基于LS-DYNA的爆胎历程轮胎刚度特性仿真研究[J].橡胶工业,2019(6):461-465.
(收稿日期: 2019.10.21)
猜你喜欢
当代经济管理(2016年12期)2017-01-10
湖北函授大学学报(2016年10期)2016-12-30
商情(2016年43期)2016-12-26
商业经济(2016年3期)2016-12-23
今传媒(2016年11期)2016-12-19
西部学刊(2016年19期)2016-12-19
现代经济信息(2016年27期)2016-12-16
企业导报(2016年19期)2016-11-05
人间(2016年26期)2016-11-03
出版广角(2016年4期)2016-04-20
