
浅谈搬运助力外骨骼机器人设计
2020-05-06 03:36钟鹏程徐心睿姚羽霏张家齐
中国新技术新产品 2020年5期
钟鹏程 徐心睿 董 含 姚羽霏 张家齐
(1.中国矿业大学孙越崎学院,江苏 徐州 221116;2.中国矿业大学机电工程学院,江苏 徐州 221116)
0 引言
外骨骼机器人是模仿生物学的外骨骼而提出的一种新型机电一体化装置[1],通过多种技术相互结合,能为穿戴者提供保护、身体支撑和协同动作等功能,辅助穿戴者完成相应的任务[2]。未来外骨骼机器人可主要应用于工业领域的负重高强度作业和助力搬运、军事领域的单兵作战和生活领域的患者四肢康复、老人出行等方面,应用前景广阔[3]。
针对工业领域的高强度负重作业和搬运重物造成工人体力消耗大、安全性低等问题,有学者设计了一种用于辅助搬运的全身外骨骼助力机器人,能辅助搬运重物,减轻使用者所受重物的压力[4],但缺点也较为明显:自由度不高,不能很好地配合使用者完成相应的动作。背部支架与下肢部件刚性连接,弯腰灵活性差。关节缺少机械限位结构,存在安全隐患。因此,针对上述问题,该文设计了一种搬运助力外骨骼机器人。
1 搬运助力外骨骼机器人设计
如图1 所示,搬运助力外骨骼机器人包括动力装置、限位装置、主控模块、上肢部件、背部架体、背部绑带、外骨骼腰部、伸缩助力装置、连接带和下肢部件。背部绑带设置在背部架体上。背部架体上端两侧对称设置多个孔,用于调节肩部宽度。主控模块设置在背部架体的后侧。2 个上肢部件安装在背部架体两侧的上方,2 个下肢部件安装在外骨骼腰部两侧的下方。外骨骼腰部设置多个孔,用于调节腰部宽度。伸缩助力装置与连接带连接背部架体与外骨骼腰部,能够有效辅助弯腰动作。伸缩助力装置包括外套筒、内套筒和弹簧,外套筒与内套筒连接,弹簧设置在外套筒和内套筒的内部。连接带可伸缩,具有弹性。
上肢部件包括肩关节、外骨骼大臂、大臂伸缩装置、大臂绑带、肘关节、外骨骼小臂、小臂伸缩装置、小臂绑带、把手和手部传感装置。如图2 所示,肩关节包括肩部第一杆件和肩部第二杆件。肩部第一杆件设置在背部架体的孔上,实现肩关节的外展/内收。肩部第二杆件设置在肩部第一杆件上,呈“L”型,实现肩关节的外旋/内旋。外骨骼大臂设置在肩部第二杆件上,实现肩关节的伸/屈。肘关节设置在外骨骼大臂与外骨骼小臂连接处。外骨骼大臂与外骨骼小臂上分别设置有大臂绑带与小臂绑带。大臂伸缩装置和小臂伸缩装置分别设置在外骨骼大臂与外骨骼小臂上,用于调节其长度。把手和手部传感装置设置在外骨骼小臂末端。上肢部件中,肩关节有3 个自由度,肘关节有1 个自由度。

图1 外骨骼机器人整体结构示意图
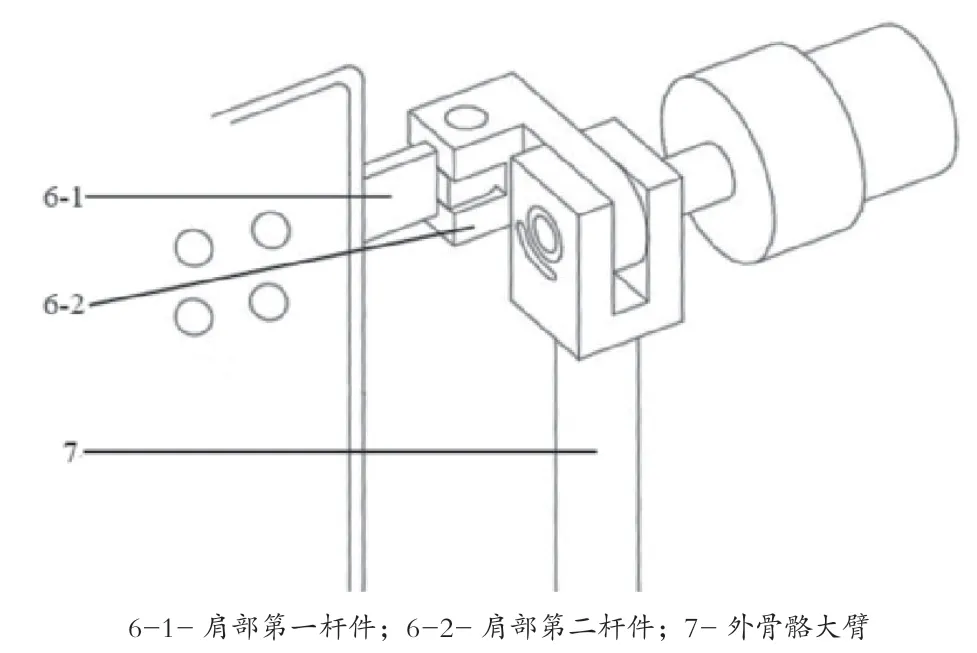
图2 外骨骼机器人肩关节结构示意图
下肢部件包括髋关节、外骨骼大腿、大腿伸缩装置、大腿绑带、膝关节、外骨骼小腿、小腿伸缩装置、小腿绑带、踝关节、外骨骼鞋、脚部传感装置和鞋部绑带。如图3 所示,髋关节包括Ⅰ杆、Ⅱ杆和Ⅲ杆。Ⅰ杆设置在外骨骼腰部的孔上。Ⅱ杆设置在Ⅰ杆上,实现髋关节的外展/内收。Ⅲ杆设置在Ⅱ杆上,实现髋关节的外旋/内旋。外骨骼大腿设置在髋关节的Ⅲ杆上,实现髋关节的伸/屈。膝关节设置在外骨骼大腿与外骨骼小腿连接处。外骨骼大腿与外骨骼小腿上分别设置有大腿绑带与小腿绑带。大腿伸缩装置和小腿伸缩装置分别设置在外骨骼大腿与外骨骼小腿上,用于调节其长度。踝关节设置在外骨骼小腿与外骨骼鞋连接处。外骨骼鞋上设置脚部传感装置和鞋部绑带。下肢部件中,髋关节有3 个自由度,膝关节有1 个自由度,踝关节有2 个自由度。

图3 外骨骼机器人髋关节结构示意图
动力装置包括传动系统、减速器、电机和角度传感器,设置在膝关节、髋关节、肩关节和肘关节上,其中角度传感器安装在电机上。
限位装置设置在踝关节、膝关节、髋关节、肩关节和肘关节上,限定外骨骼机器人的运动范围,防止外骨骼机器人出现故障时对使用者造成伤害。如图3 所示,髋关节限位装置设置在Ⅰ杆、Ⅱ杆、Ⅲ杆和外骨骼大腿连接处,其中Ⅰ杆与Ⅱ杆连接处限定了髋关节的外展/内收,Ⅱ杆与Ⅲ杆连接处限定了髋关节的外旋/内旋,Ⅲ杆与外骨骼大腿连接处限定了髋关节的伸/屈。
2 搬运助力外骨骼机器人工作原理
使用者穿戴搬运助力外骨骼机器人前,根据使用者的身材、调整肩部宽度和腰部宽度,确定肩部第一杆件设置在背部架体的孔的位置和Ⅰ杆设置在外骨骼腰部的孔的位置。调整小腿伸缩装置、大腿伸缩装置、大臂伸缩装置和小臂伸缩装置,从而确定外骨骼小腿、外骨骼大腿、外骨骼大臂和外骨骼小臂的长度。使用者穿戴搬运助力外骨骼机器人时,用鞋部绑带将使用者脚部与外骨骼鞋固定,用小腿绑带将使用者小腿与外骨骼小腿固定,用大腿绑带将使用者大腿与外骨骼大腿固定,用背部绑带将使用者背部与背部架体固定,用大臂绑带将使用者大臂与外骨骼大臂固定,用小臂绑带将使用者小臂与外骨骼小臂固定。
使用者穿戴好搬运助力外骨骼机器人后,当要搬运重物时,先弯下腰,使用者髋关节的运动带动外骨骼机器人的髋关节转动一定角度,外骨骼机器人的伸缩助力装置收缩,连接带弯曲。使用者上肢肘关节与肩关节的运动带动外骨骼机器人的肘关节与肩关节的运动,将重物搬起,同时直起腰,使用者髋关节的运动带动外骨骼机器人的髋关节转动一定角度,外骨骼机器人的伸缩助力装置拉伸,连接带弹起,有效辅助弯腰搬起重物。行走过程中,使用者下肢髋关节和膝关节的运动带动外骨骼机器人的髋关节和膝关节的运动,辅助使用者行走。同时,外骨骼机器人的上肢部件辅助使用者在行走过程中托举重物。到达目的地后,先弯下腰,使用者髋关节的运动带动外骨骼机器人的髋关节转动一定角度,外骨骼机器人的伸缩助力装置收缩,连接带弯曲。使用者上肢肘关节与肩关节的运动带动外骨骼机器人的肘关节与肩关节的运动,将重物放下,同时直起腰,使用者髋关节的运动带动外骨骼机器人的髋关节转动一定角度,外骨骼机器人的伸缩助力装置拉伸,连接带弹起。在搬运重物的过程中,当关节的电机转动到一定角度后,角度传感器检测到预先设定好的角度,传递给主控模块,主控模块控制电机停止转动。限位装置限定的角度略大于关节运动预先设定好的角度。在搬运重物的过程中,如果外骨骼机器人出现的故障导致电机无法停止转动,那么该关节的限位装置会限制关节转动,从而使电机转速变为0。此时,角度传感器测得的角度超过预先设定好的角度,并且角度传感器测得电机转速突然变为0,信号传给主控模块,主控模块控制电机停止工作。没有电机驱动的关节的限位装置限定了该关节自由转动的角度,保证了工作时关节在安全的角度范围内转动。
3 结语
针对工业领域的高强度负重作业和搬运重物造成工人体力消耗大、安全性低等问题,该文设计了一种搬运助力外骨骼机器人。外骨骼机器人的关节自由度符合人体特征,运动灵活。背部架体与外骨骼腰部之间设置了伸缩助力装置与连接带,能够有效辅助弯腰动作。四肢可快速调节长度,方便穿戴,结构简单。各个关节都设置了限位装置,防止外骨骼机器人出现故障时对使用者造成伤害,安全性高,能帮助穿戴者辅助搬运重物,降低疲劳强度,提高工作效率。
猜你喜欢
包装与食品机械(2021年5期)2021-11-06
环境技术(2021年4期)2021-09-11
制造技术与机床(2019年12期)2020-01-06
组合机床与自动化加工技术(2019年5期)2019-05-24
青岛画报(2017年10期)2018-02-01
文学港(2017年11期)2017-12-06
载人航天(2016年4期)2016-12-01
家庭百事通(2016年1期)2016-01-12
综合智慧能源(2014年1期)2014-09-10
中国工程机械学报(2014年3期)2014-05-25
