
基于磁流变阻尼器的高速受电弓模糊半主动控制
2020-06-04 05:37赖森华杨基宏
科学技术与工程 2020年11期
杨 岗, 李 芾, 赖森华, 杨基宏, 曹 伟
(1.西南交通大学机械工程学院,成都 610031;2.中车青岛四方机车车辆股份有限公司技术中心,青岛 266111)
电力机车通过弓网获取外界电能。弓网为活动耦合关节,是影响列车安全的关键要素。弓网性能取决于机车速度、弓网参数及其匹配关系。机车高速运行时,接触压力波动剧烈,受流质量下降,且致使碳滑板与接触线磨损严重,产生大量噪声和热量;极端情况下,甚至发生离线现象并出现燃弧,烧结弓网;随着服役时间增长,接触网参数及弓网匹配关系发生劣化,致使弓网性能劣化,影响列车运行安全。为实现经济性的弓网性能改善,弓网主动控制、半主动控制应用逐步成为研究热点。杨岗等[1-2]、Arie等[3]建立了弓网耦合三元半主动动力学模型,并使用仿真手段研究了线性二次型调节器(liner quadratic regulator, LQR)、滑模等控制策略,效果良好。鲁小兵等[4]针对SBS81、DSA250、DSA380和SSS400+型受电弓建立了弓网模型,设计了最优控制器、变结构控制器和模糊控制器,进行了仿真研究。任志玲等[5]进行了基于接触力历史数据,利用预测控制技术的弓网半主动控制研究,结果表明能有效提高弓网耦合质量。任朋彪[6]设计了基于数字信号处理器(digital signal processor,DSP)及比例-积分-微分(proportion-integral-differenti, PID)控制的主动控制试验系统实现对弓网间的接触力的主动控制。半主动控制消耗外界能源极少,控制过程鲁棒性高,在建筑、海洋钻油平台、车辆、航空、桥梁等领域已有较多应用[7-9],但在弓网控制方面却鲜有研究。磁流变阻尼器(magnetorheological damper, MRD)是应用磁流变液在外界磁场作用下阻尼特性可变机理而制造的减振装置[10],具有物理结构简单、阻尼特性可调、响应迅速(毫秒级)、控制力大、耐久性好、耗电少等优点,可应用于阻尼半主动控制。接触网在长线路中结构多变,且受随机外界激励影响,是复杂、结构不确定的非线性动力学系统。模糊控制算法鲁棒性强,不需要被控系统有精准数学模型,因此特别适合于受电弓的主动控制。
现研究模糊控制策略下的剪切阀式磁流变阻尼受电弓半主动控制,通过仿真手段,分析磁流变变阻尼半主动控制对弓网振动性能的影响。
1 磁流变阻尼器力学模型
磁流变液(magnetorheological fluid, MRF)是黏性、塑性等流体性能在磁场作用下能急剧改变的材料,特征是施加外部磁场,其能在毫秒内从流动液体变为半固体,且变化可逆。MRF性能机理较为复杂,一般通过实验确定其力学特性,MRF在磁场作用下剪应力和剪应变速率间关系可由Bingham黏塑性模型描述[11],其关系为
(1)

剪切屈服强度τy为MRF的重要性能指标[11],研究表明,颗粒未达磁饱和时:
τy=K1Hα
(2)
颗粒达到磁饱和时:
(3)
式中:K1和K2为常数,与MRF颗粒含量、形状、直径、饱和磁化强度等要素有关;α为取值范围,为1~2的常数;Ms为颗粒的饱和磁化强度,A/m。
磁流变阻尼器(MRD)是利用磁流变液特性而构建的一种半主动控制装置,根据MRF的受力状态和流动特性,MRD主要类型有剪切、阀、剪切阀(图1)和挤压流动等形式,其中剪切阀式MRD实际应用较多,其阻尼力计算模型[10]为
(4)
式(4)中:Lh为活塞长度,m;d为活塞杆直径,m;D为容器内直径,m;h为活塞与容器的间隙,m。
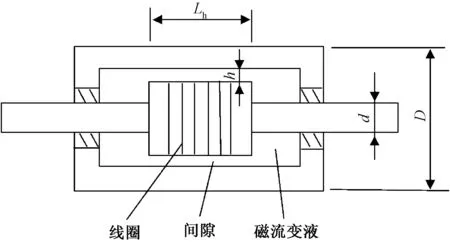
图1 剪切阀式磁流变阻尼器原理图Fig.1 Diagram of shear valve magnetorheological damper
2 弓网磁流变阻尼器半主动控制模型
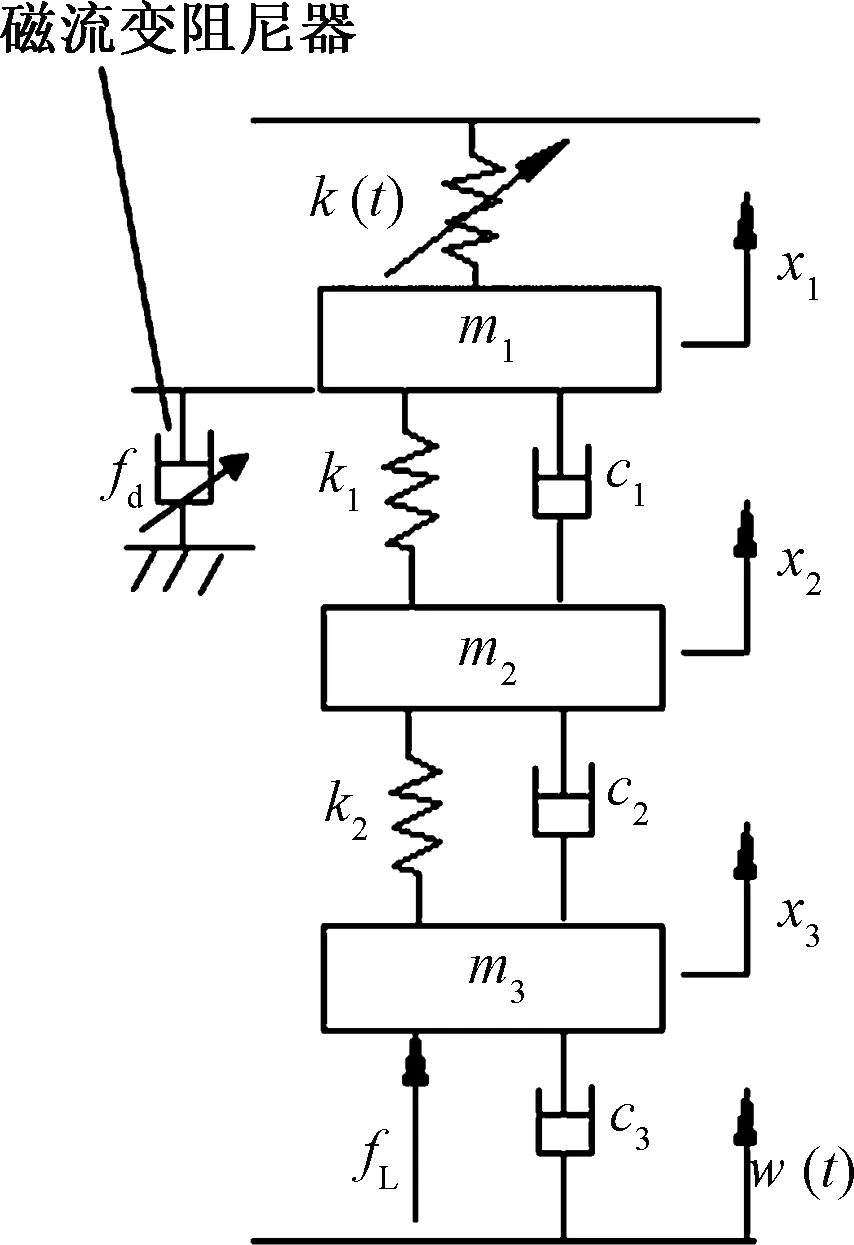
图2 弓网半主动控制模型Fig.2 Mode of semi-active pantograph-catenary system
弓网的动力学系统极端复杂,动力学模型自由度无限,研究中通常将其简化,图2所示为弓网半主动控制模型[12]。模型中,受电弓归算为三集中质量及理想弹簧阻尼,接触网理想化为变刚度弹簧接触力元,k(t)为其接触弹簧等效刚度,N/m;m1、m2、m3分别为弓头、上框架、下框架质量,kg;k1、k2为弓头及框架刚度,N/m;c1、c2、c3为弓头、框架阻尼,N·s/m;w(t)为机车激扰信号,m;fL为受电弓静抬升力,N;fd为磁流变阻尼器阻尼系数。文献[6]给出了一种接触网刚度表达式,即
(5)
式(5)中:
为机车速度,m/s;L为接触网跨距,m;L1为相邻吊弦间距,m;k0为可变弹簧平均刚度,N/m;α1、α2、α3、α4和α5为刚度差异系数。对于国内弹性链形悬挂接触网,试验并分析可得k0=1 925,α1=0.075 5,α2=-0.073 5,α3=-0.145 9,α4=-0.057 5,α5=0.069 9。
在弓网系统的弓头m1处安装一个磁流变阻尼器,形成半主动控制受电弓,则弓网系统的动力学模型为
(6)
式(6)中:

根据第2节所述,磁流变阻尼器的阻尼力可以写成如下形式:
(7)
式(7)中右边第1项是被动黏滞阻尼力,不可控制、调节;第2项是可变库仑阻尼力,可以控制、调节,控制的过程是依据某种控制策略,调节磁流变阻尼器的输入电流,控制磁场强度,进而改变MRF剪切屈服强度,从而产生控制所期望的控制力。因此,式(6)右边的磁流变阻尼控制力项Bsfd可以分解为两部分,即
(8)
式(8)中:第1项是变阻尼器的被动黏滞阻尼力,其中Ck为被动黏滞阻尼力作用矩阵;第二项usy是变阻尼器按某种控制算法实现的可控库仑阻尼力。将式(8)带入式(6),则弓网系统变阻尼半主动控制动力学方程为
(9)
(10)
Y=C0Z(11)
式中:
在变阻尼半主动控制中,变阻尼器只能提供与其相对速度相反的力。也正因如此,变阻尼半主动控制无条件稳定,系统鲁棒性良好。
3 模糊控制器及控制策略设计
弓网系统是非线时变动力学系统,常规线性控制策略与方法难以达到期望目标,而模糊控制策略不需要精确的被控对象的动力学模型,强调使用人类控制经验和知识,是解决弓网系统主动、半主动控制问题的有效手段。
3.1 模糊控制原理
模糊控制基本思想如图3所示,其核心为虚线框内的控制器部件,主要包括模糊化、推理机、规则库和反模糊化等要素。因此弓网模糊控制的主要工作是设计控制器,包括模糊规则、模糊化与反模糊化方法、模糊控制输入输出变量论域等方面的设计工作;模糊规则选取包括语言变量设定、语言值隶属度设计和构建模糊推理规则等。
3.2 模糊控制器的输入输出

图3 模糊控制原理图Fig.3 Diagram of fuzzy control
在弓网系统半主动控制器设计中,选择弓网接触压力偏差e(t)=r(t)-y(t) 和接触压力偏差变化率de(t)/dt为控制器输入变量。控制器输出选取用于控制磁场强度的电流i(t)。弓网系统控制目标为弓网接触力趋于70 N。依据专家经验及线路试验,e(t)论域取为[-200 200],N;de(t)/dt论域取为[-2 000 2 000],N/s;i(t)论域取为[0 2], A。
3.3 输入输出量模糊化
在模糊控制中,输入输出变量是接近于人类语言的语言变量,其值域并非具体数值,而是类似于“极大”“大”“小”等定性描述的语言值。本研究中,为接触力偏差E、接触力偏差变化率DE等两个语言变量设定相同的语言值域,即T(E)=T(DE)={NB,NM,NS,ZO,PS,PM,PB}({负大,负中,负小,零,正小,正中,正大}),电流I的语言值集合为T(I)={VB,B,M,S,VS,ZO}({极大,大,中,小,极小,零}),语言值E、DE、I对应的论域e(t)、de(t)及i(t)取值连续,使用隶属曲线描述其对应关系。隶属曲线主要有正态分布、三角形、梯形等形式,其中三角形隶属度表示法操作简单,推理资源消耗低,且能够达到控制精度的要求,故本次研究采用三角形隶属度函数。图4~图6分别列出了E、DE及I语言值的隶属度曲线。
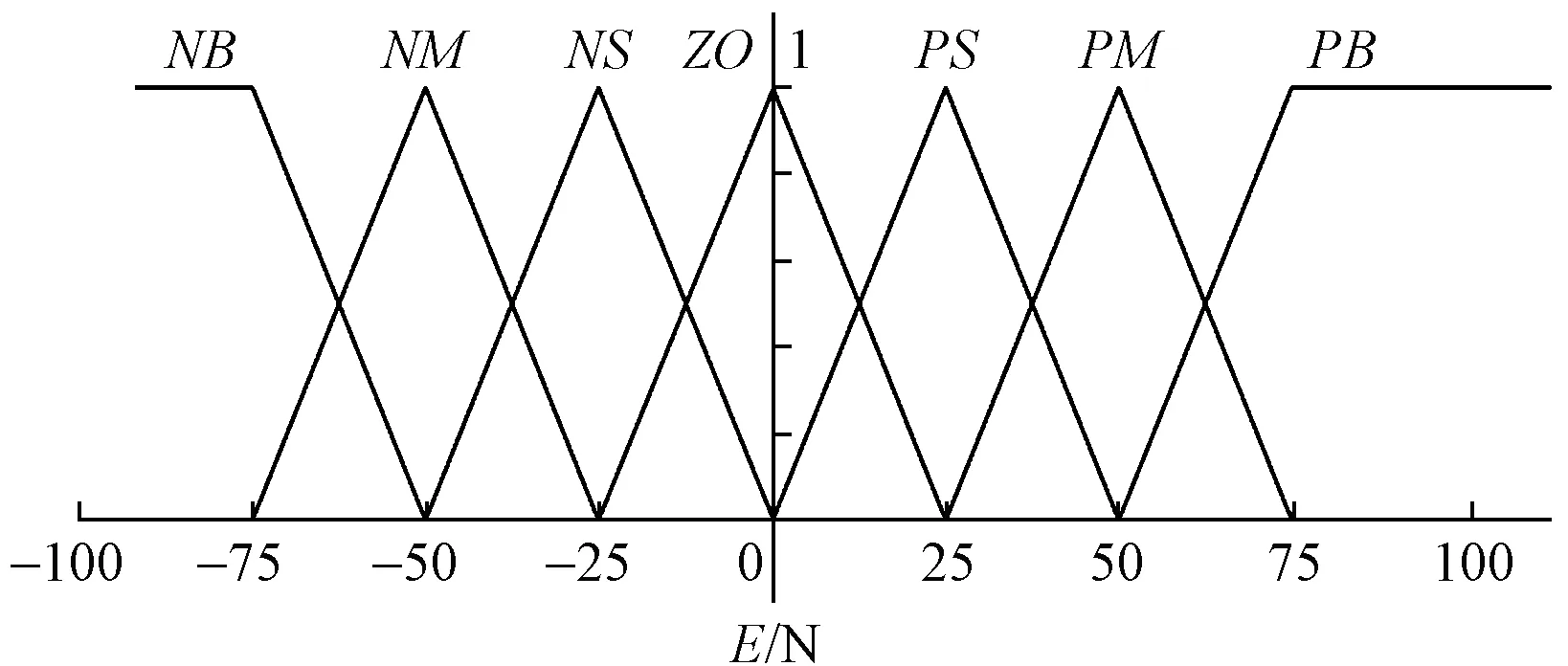
图4 偏差E的隶属度曲线Fig.4 Membership degree of E
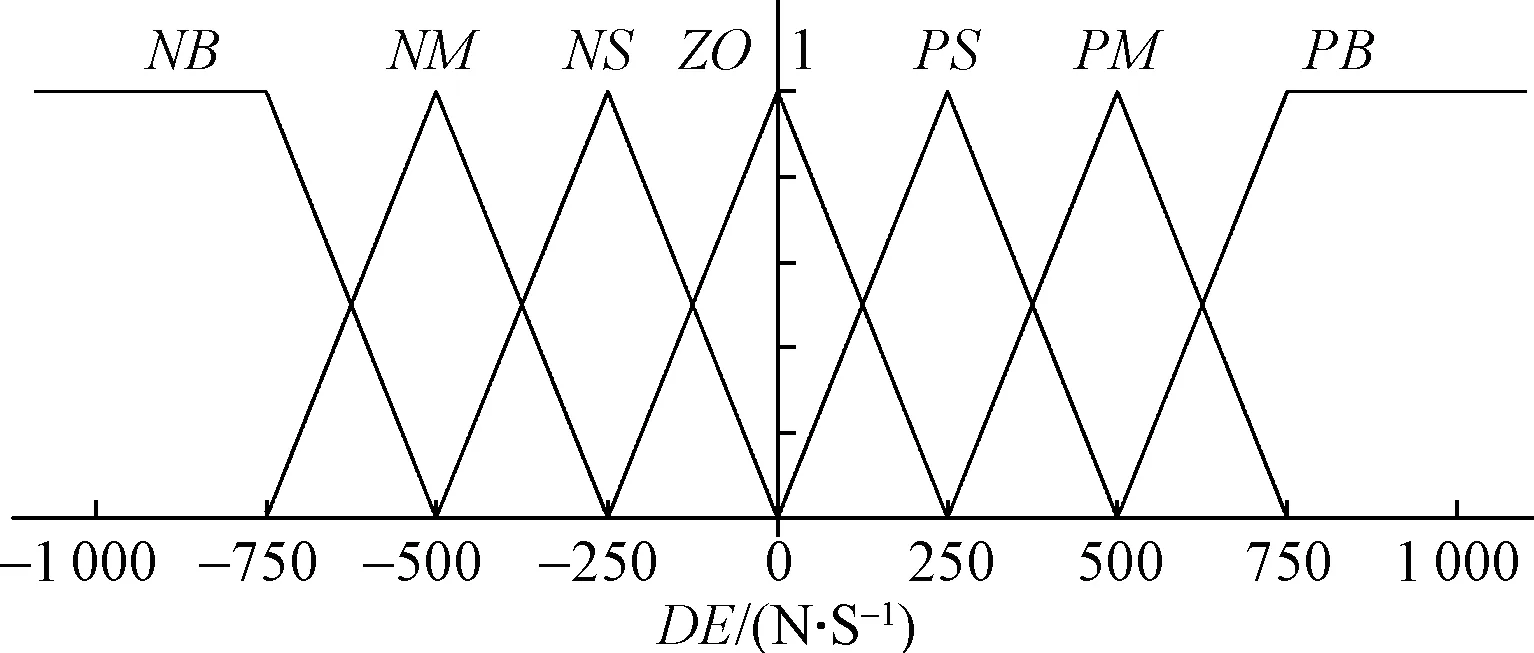
图5 偏差变化速度DE的隶属度曲线Fig.5 Membership degree of DE
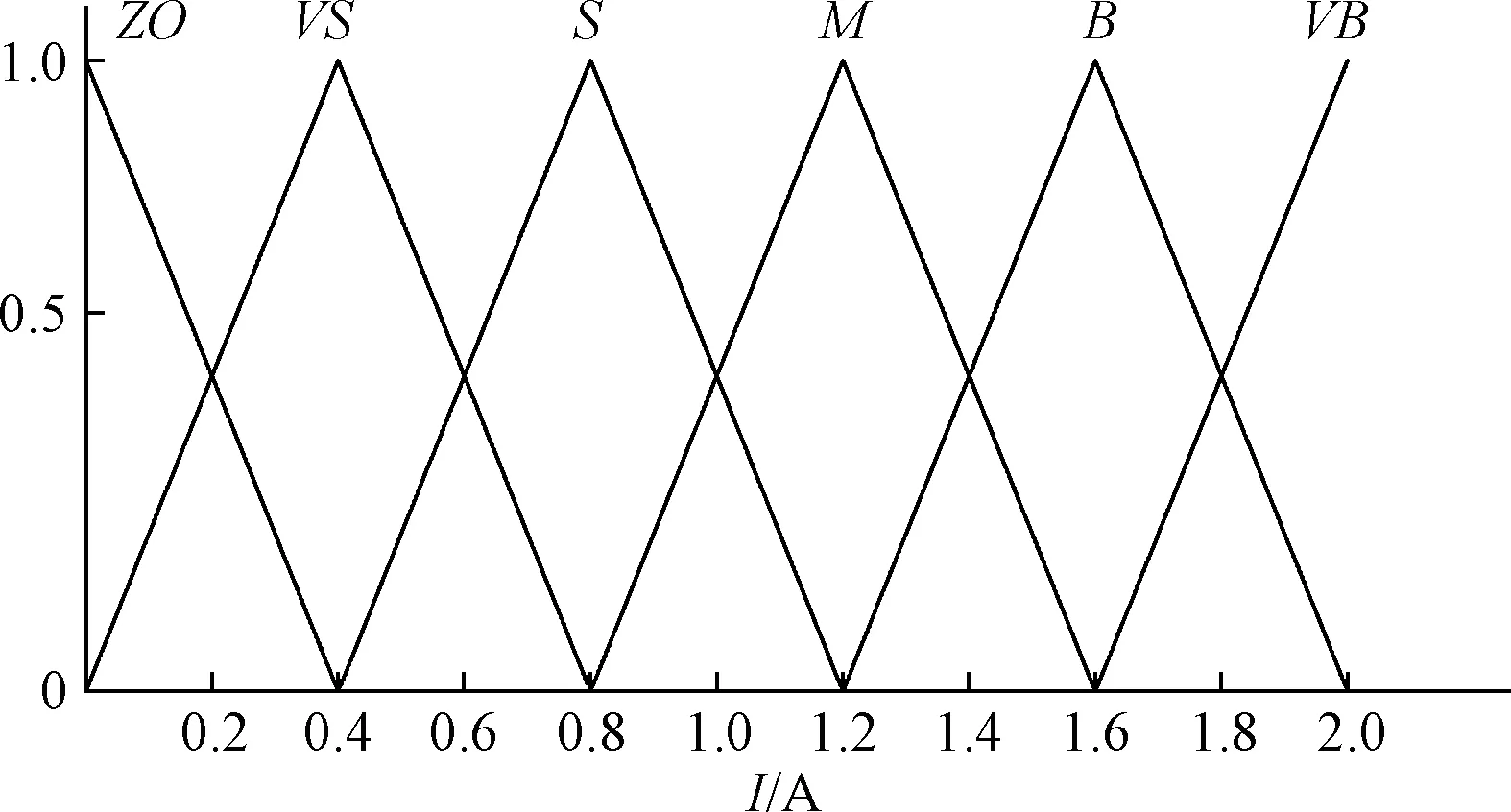
图6 控制电流I的隶属度曲线Fig.6 Membership degree of I
3.4 模糊控制规则表
模糊推理以规则知识库为基础进行推理,是控制效果的主要决定因素,建立良好规则库的前提是设计者应具有丰富的历史经验及专业知识。本次研究基于以下原则建立推理知识库:①当误差较大时,控制量的选取以尽快消除误差为主;②当误差较小时, 控制量的选取以保持系统稳态为出发点,尽量防止超调。基于以上原则并结合专家经验设计表1所示的模糊推理规则表。
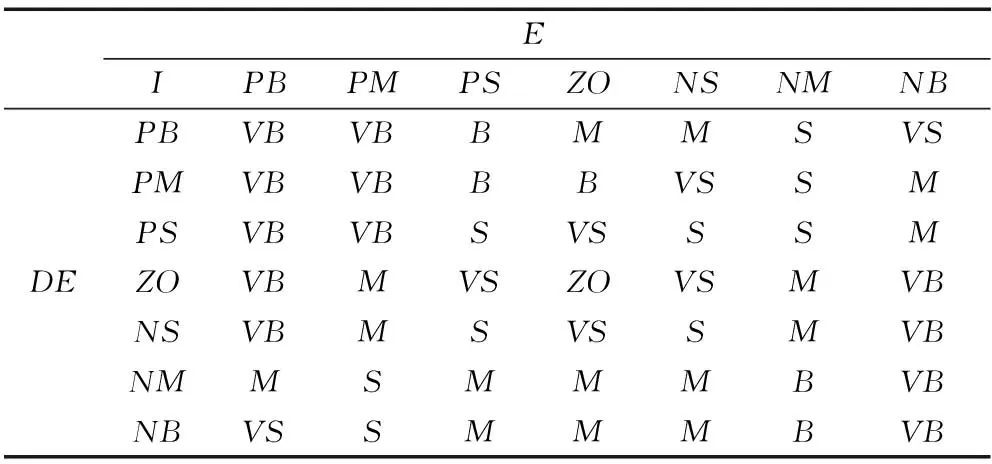
表1 模糊控制规则表
3.5 输出量反模糊化
模糊推理得到输出变量电流I是语言值,在实际弓网控制系统中,必须使用确定的电流i(t)才能控制磁流变阻尼器以产生相应阻尼力。因此需要将语言值I反模糊化为具体数值。反模糊化主要有最大隶属度、重心、加权平均、平均、隶属度限幅元素平均等方法,其中重心法较为简单可靠且应用较广,因此选用重心法反模糊化电流输出。
4 弓网MRD半主动控制仿真与分析
4.1 主动控制算法参数
MRD半主动控制参数设计时需参照主动控制策略的主动控制力。首先设计模糊主动控制器,其输入及其语言变量与模糊半主动控制器相同,控制器输出为弓头与框架间的主动控制力u(t),论域取为[-80 80];与其相对应的语言变量为T(U)={NB,NM,NS,ZO,PS,PM,PB}。在列车速度为150、350 km/h工况下,主动控制下仿真结果如图7、图8所示。可以看出:模糊主动控制下弓网接触力波动幅度降幅达70%;接触力最大值降幅达50%;接触力最小值升幅达80%。
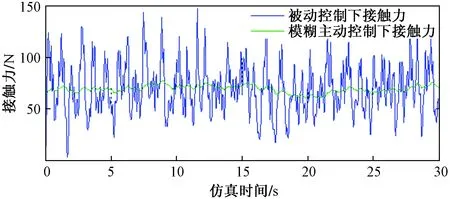
图7 v=150 km/h时,主动控制下弓网接触力Fig.7 Contact force with v=150 km/h under active control
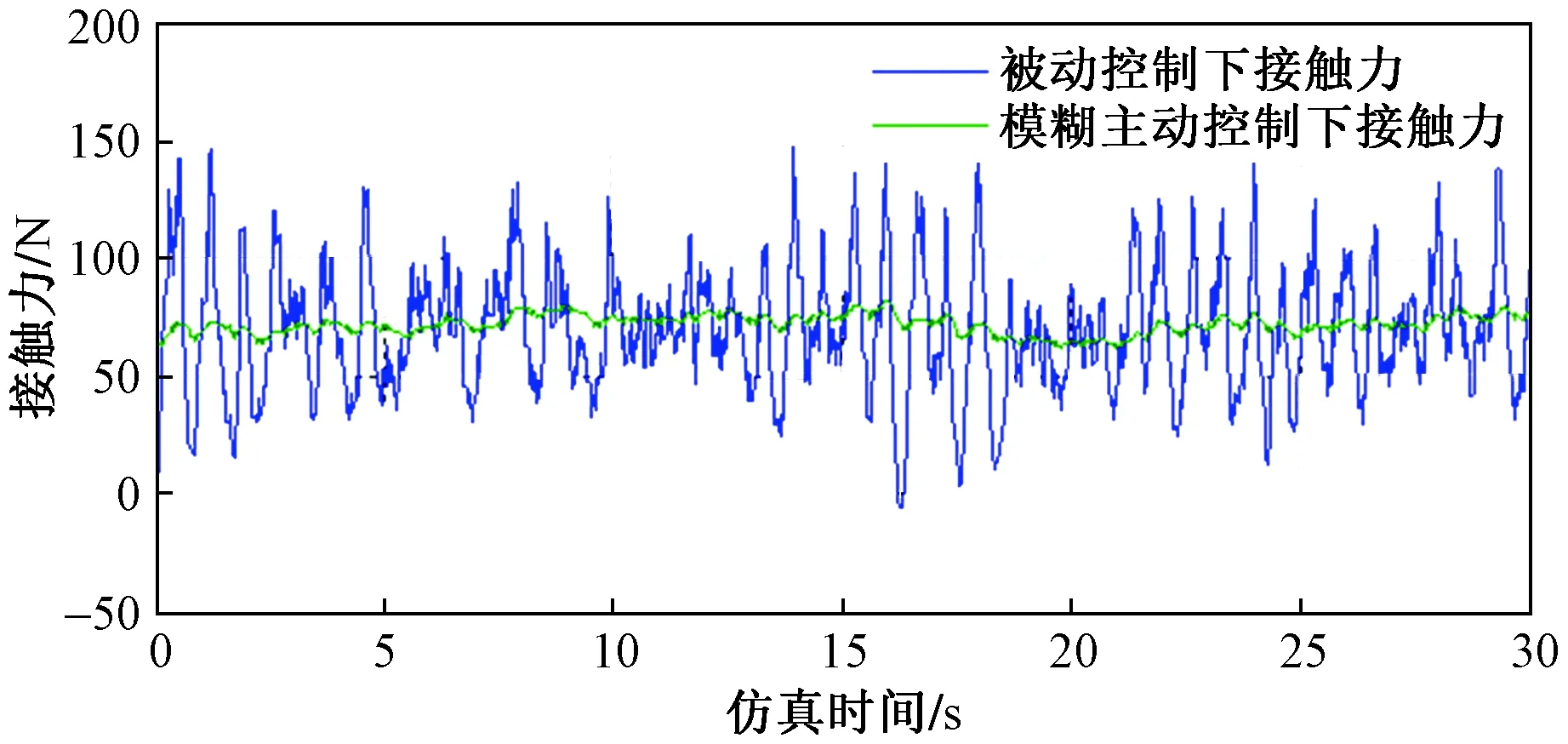
图8 v=350 km/h时,主动控制下弓网接触力Fig.8 Contact force with v=350 km/h under active control

4.2 磁流变阻尼器参数设计
为使变阻尼半主动控制与主动控制的效果接近,系统中的磁流变阻尼器产生的阻尼力(包括黏滞阻尼力和库仑阻尼力)上限应等于最大主动控制力[13],即
(12)
式(12)中:fdymax为库仑阻尼力最大值,假定MRD的最小库仑阻尼力fdymin=0,其阻尼力可调倍数s=6,则由式(12)可得:
(13)

设计阻尼器在电流强度为2 A时达到最大阻尼力,则可求的理想阻尼器的力学函数:
(14)
4.3 弓网模糊半主动控制仿真
利用SIMULINK软件,建立弓网MRD半主动控制模型的计算机仿真模型。仿真时采用如下参数[14]:接触网采用弹性链形悬形式,其刚度见式(5);受电弓参数m1=6.4 kg,m2=7 kg,m3=12 kg,k1=2 650 N/m,k2=10 000 N/m,c1=100 N·s/m,c2=100 N·s/m,c3=70 N·s/m;w(t) 取噪声功率为0.01的白噪声;采用式(14)表示的MRD的力学模型。
图9、图10所示为机车在150 km/h和350 km/h工况下的被动控制及模糊半主动控制仿真结果,可见,模糊半主动控制能够有效抑制弓网接触力波动程度,提高弓网接触平稳性,进而提高弓网受流质量。
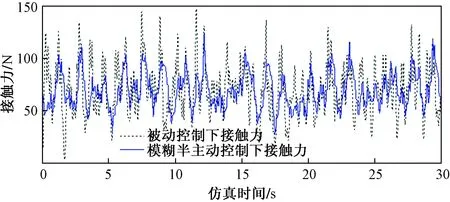
图9 v=150 km/h 时,半主动控制下弓网接触力Fig.9 Contact force with v=150 km/h under semi-active control
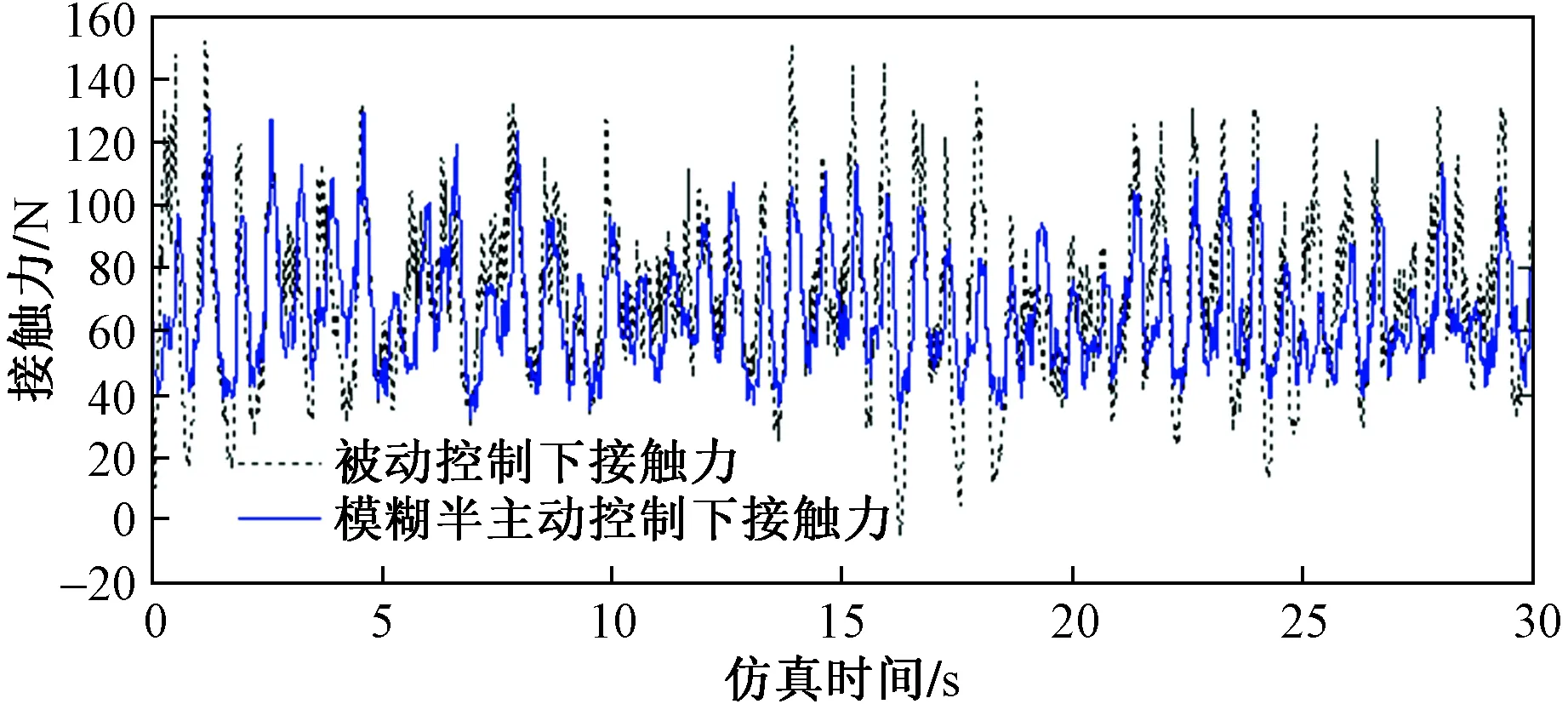
图10 v=350 km/h时,半主动控制下弓网接触力Fig.10 Contact force with v=350 km/h under semi-active control
4.4 模糊半主动控制对受流质量影响分析
为定量分析模糊半主动控制效果,对上述仿真数据,选取接触力最大值Fmax、最小值Fmin、接触不均匀系数c作为评价指标进行弓网受流质量分析[12,15]。可得出表2、表3所示的数据。

表2 v=150 km/h时,受流质量指标

表3 v=350 km/h时,受流质量指标
由表中分析数据可知,在不同的运行速度等级下,MRD模糊半主动控制方法是改善弓网振动特性的重要的可行的手段,可有效提高弓网接触力最小值,降低接触力最大值,降低弓网接触力不均匀系数。从而使弓网接触压力的波动程度得到极大改善,弓网受流质量得到有效提高。
5 结论
研究了受电弓阻尼模糊半主动控制机理,建立了弓网MR阻尼模糊半主动控制算法及其动力学模型,通过SIMULINK仿真工具分析了模糊控制策略下MRD半主动控制弓网动态性能,得出如下结论:
(1)受电弓MRD模糊半主动控制对不同速度工况下的弓网系统性能均有良好提升作用,降低弓网接触力波动幅度达20%;降低弓网接触力最大值,幅度达20%;提高接触力最小值,幅度达80%;使弓网离线率降至0。
(2)磁流变阻尼器半主动控制过程无条件稳定,具有良好鲁棒性。在列车高速运行环境下,MRD半主动控制技术将成为改善弓网性能,降低牵引能耗和噪声的重要手段。
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
信息记录材料(2022年3期)2022-05-17
铁道机车车辆(2021年5期)2021-11-19
电子技术与软件工程(2021年10期)2021-07-05
广西科技大学学报(2021年1期)2021-03-15
北京理工大学学报(2020年11期)2020-12-15
铁道标准设计(2020年2期)2020-02-26
物理通报(2019年11期)2019-11-07
科学与财富(2018年12期)2018-06-11
科学与财富(2017年12期)2017-05-16
