一种人力驱动垃圾箱清洗装置设计
2020-06-28 02:13张更娥李美妆
黑龙江科学 2020年12期
张更娥,丁 源,李美妆
(1.南宁学院,南宁 530200;2.上海海事大学,上海 201306)
0 引言
随着国民经济的发展,人们生活水平的提高,城市人口也在迅猛增长,随之导致生活垃圾以及垃圾桶的数量也在不断增加,环境质量问题也越来越严重。大中小型城市对环境清洁方面越来越重视,要求也越来越严格。垃圾桶清洁度是提高城市环境的标准之一,其设计需要满足“高效率、节能、环保、低成本”等要求。要实现这些条件,使用传统的清洗方式不仅费时、费力,也难以达到清洗的最优效果。本设计通过高压水枪喷湿垃圾箱,随之转动手柄驱动齿轮,使其沿着齿条机构上下运动,人工通过推拉方式移动水平滑轨实现左右运动,从而带动毛刷运动完成整个垃圾箱清洗任务,这不仅可大大降低劳动强度、节约水资源,还提高了劳动效率。本设计以齿轮齿条的设计为主要目标,讨论了齿轮齿条在上下运动工作时伸臂与箱面的受力计算。
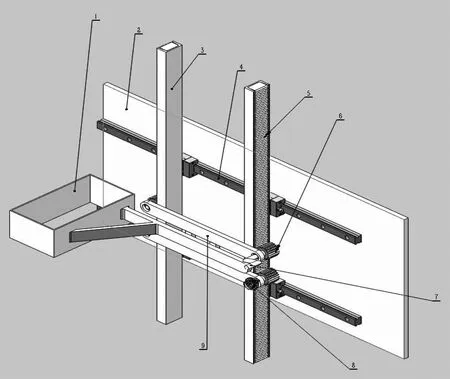
1-伸臂及刷架 2-车头 3-80号槽钢 4-滑轨装置 5-齿条 6-齿轮 7-手柄 8-棘轮装置 9-连接板

图2 连接板局部图
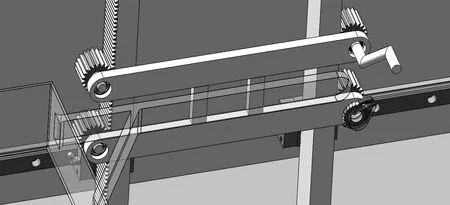
图3 连接板整体图
1 垃圾箱清洗装置总体设计
根据垃圾箱清洗装置的总体结构,垃圾箱清洗装置主要分为传动系统、喷水系统、清刷系统三大系统。垃圾箱清洗装置的整体设计方案:以环卫车作为清洗装置的载体,实现不同垃圾箱之间清洗的灵活性和便捷性,保证装置的“自由移动”。水枪喷水的同时,毛刷能对垃圾箱进行清洗,能够实现单向行驶、多侧同时清洗的作业目的。整个装置由四部分组成,分别是底盘、传动装置、清刷装置与供水装置。传动装置是前悬式结构,由齿轮齿条机构、槽钢、滑轨及伸臂等组成。整个传动装置是将两根滑轨平行固定于车头,槽钢凌驾于滑轨上且齿条焊接于钢槽中。为避免由于齿条自身重力作用而使其产生横向倾斜或侧翻,齿条与槽钢之间通过焊接的形式连接。齿轮与齿条在运动过程中可能会发生不啮合现象,因此以连接板作为齿轮排的基架,将齿轮固定其上并与齿条啮合(齿轮排基架由齿轮、齿轮轴及连接板组成),双排齿轮的间距为140 mm。基座由大小、规格一致,但长短不一致的铁板焊接而成。在基座上安放长度为900 mm的方钢作为伸臂,伸臂一端与毛刷架相连接。为使工作时毛刷架不产生晃动,则安装长为1 000 mm方钢作为固定杆。当作业人员转动手柄驱动齿轮时,齿轮沿着齿条方向运动,并带动毛刷实现清洗过程。当齿轮到达顶部位置时,为防止发生齿轮下滑,通过控制棘轮来锁止齿轮。清洗装置位于环卫车正前方,能够保证清洗作业过程中不妨碍其他车辆运行,作业人员具有良好的视野,使清洗车能够停靠在合适的位置。整个清洗装置的结构稳定可靠。清刷装置由刷毛、刷板和各种紧固件组成,刷板与毛刷架之间通过螺栓紧固于一体。供水装置是提供清洗用的辅助装置,它是由喷水机构、储水箱及相应的管路设备组成。喷水机构是用于喷头射水作业的机构,利用水枪通过压力方式喷洒在垃圾箱面上,从而实现喷水过程。所用的储水箱容量为200 L,能够满足半个工作日的工作要求。当作业人员操纵齿轮手柄时,进而带动伸臂及毛刷上下刷洗,操作方便,同时能够对清洗车实现不同高度位置的瞬间控制反应,提高作业效率和作业质量。
2 垃圾箱清洗装置设计
2.1 传动系统设计
2.1.1 滑轨结构及尺寸
该清洗装置中,滑轨是整个清洗装置的载体,也是连接环卫车和清洗装置的中间体。滑轨的主要作用是使装置不工作时将其水平移动到合适位置,即与车头同宽,既满足了在车道范围内的行驶,还实现了从车头到垃圾箱的水平距离的要求。该装置能够很好地承受整个垃圾箱清洗过程给予其各种力的作用。
滑轨的总长度不大于环卫车车头的总宽度1 300 mm,以满足安装要求。滑轨安装在环卫车的底盘车头位置处,并与其成刚性连接,保证装置在清洗过程的稳定性与安全性。滑轨分为上下两条滑轨,两滑轨成对称状且用螺栓固定在机车前端,其间保持300 mm的距离,便于其他装置的安装。
2.1.2 齿轮齿条设计及其计算
2.1.2.1 齿轮轴的设计
齿轮轴与摇动手柄是直接连接的,连接方式可采用平键连接或焊接,由于齿轮需要上下运动,因此采用平键连接。选定齿轮轴直径为φ20。驱动力Ft=40 N。
2.1.2.2 齿轮齿条设计部分
齿轮所需驱动力Ft=40 N,齿轮上下移动速度为V=0.55 m/s(L=1100 m,t=2 s),齿轮传动要求均匀平稳工作。由于齿轮齿条传动属于硬齿面开式传动,因此按齿根弯曲疲劳设计齿轮几何参数,再根据相关参数校核齿轮强度。按所设计的传动方案,选用直齿圆柱齿轮传动,压力角为标准值20°。垃圾箱清洗装置为一般工作机械,参考《机械设计手册》,选用7级精度。材料选择:查阅《机械设计手册》,选用齿轮材料为40Cr(调质),齿面硬度为280HBS,齿条材料为45钢(调质),齿面硬度为240HBS。选齿轮齿数为z1=20,齿条齿数z2=117。
2.1.2.3 按齿根弯曲疲劳强度设计
第一,设计公式。
(1)
1)确定公式中的各参数值。
①初选KFt=1.3。
②计算齿轮传递的扭矩。
初定转速n1=100 r/min,驱动力Ft=40 N,则扭矩为:
T1=F·L=40×150 N·mm=6×103N·mm
(2)
③查机械设计手册表10-7,选取齿宽系数φd=1。
④计算弯曲疲劳强度重合度系数:
(3)
由10-18图查得应力修正系数Ysa1=1.55,Ysa2=1.8。
由10-24图查得齿轮和齿条的齿根弯曲疲劳极限分别为:σFlim1=500 MPa,σFlim2=380 MPa。
根据图10-22查得弯曲疲劳寿命系数KFN1=1.77,KFN2=2.5,
取弯曲疲劳安全系数s=1.4,则有:
(4)
(5)
(6)
(7)
(8)
2)试算模数。
(9)
第二,调整齿轮模数。
1)计算实际载荷系数前的数据准备。
①圆周速度v:
d1=mtz1=0.43×20 mm=8.6 mm
(10)
(11)
②齿宽b:
b=φdd1=1×8.6 mm=8.6 mm
(12)

(13)
(14)
2)计算实际载荷系数KF。
根据v=0.045 m/s,7级精度,由图10-8查得动载系数Kv=1.03。
(15)
(16)
查《机械设计手册》10-3表得齿间载荷分配系数KFα=1.1。
由表10-4用插值法查得KHβ=1.316,结合b/h=8.89,查图10-13,得KFβ=1.25。
则载荷系数为:
KF=KAKvKFαKFβ=1×1.03×1.1×1.25=1.42
(17)
3)由式(10-13)可得按实际载荷系数算得的齿轮模数:
(18)
根据标准模数,最终取模数m=2 mm。
第三,对齿轮齿条进行几何尺寸计算,如表1所示。

表1 齿轮齿条基本参数
2.1.2.4 按齿根弯曲疲劳强度校核
由上述可知:
KF=1.42,T1=6×103N·mm,YFa1=2.83,YFa2=2.15,Ysa1=1.55,Ysa2=1.8,φd=1,Ys=0.29,m=2 mm,z1=20带入下式得
(19)
(20)
齿根弯曲疲劳强度满足要求,并且齿轮抵抗弯曲疲劳破坏强度的能力大于齿条。
2.1.2.5 主要设计结论
齿数z1=20,z2=117,模数m=2 mm,压力角α=20°,齿宽b1=30 mm,b2=40 mm。齿轮选用40Cr(调质)、齿条选用45号调质钢。齿轮按7级精度设计,如图4。
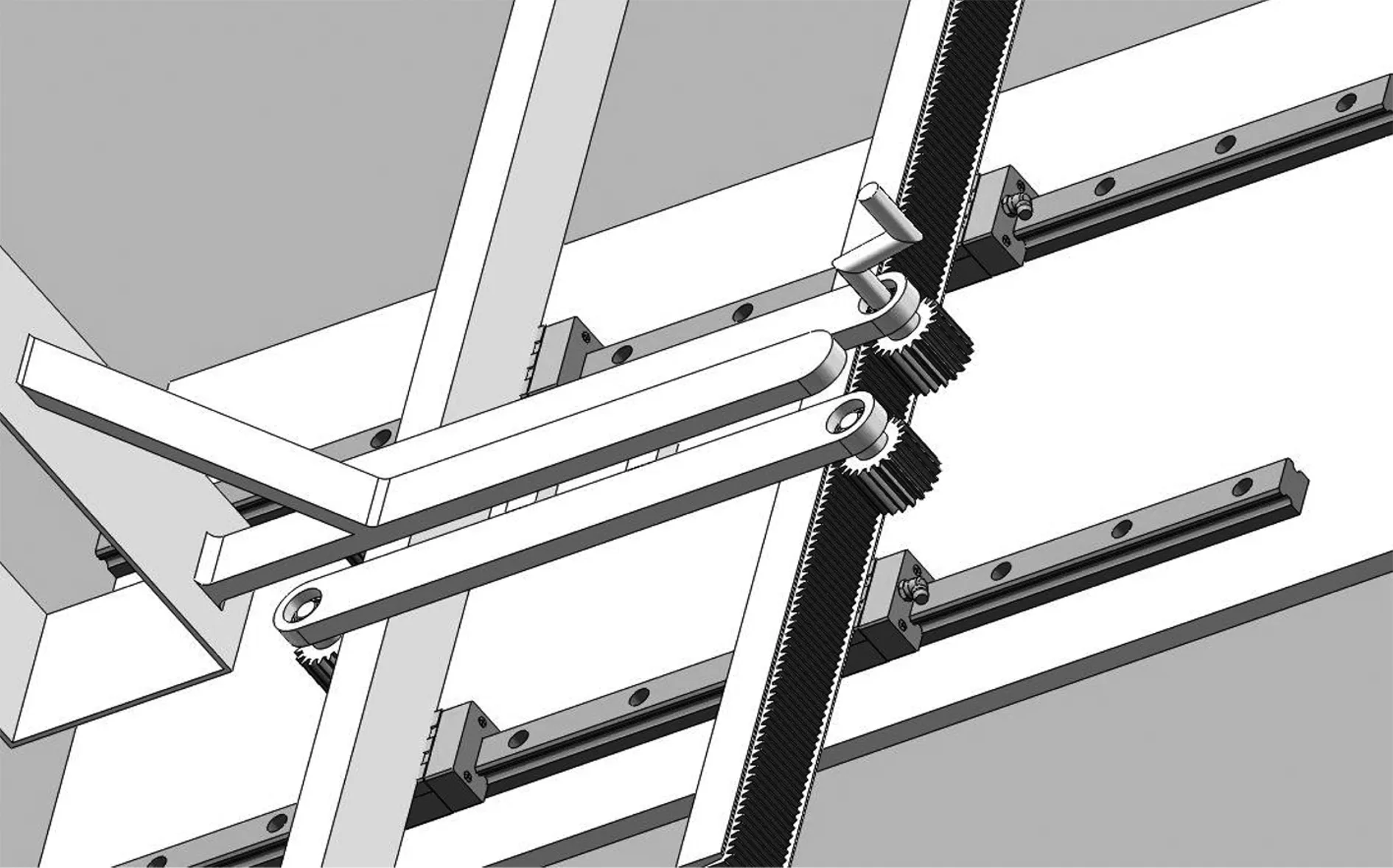
图4 齿轮齿条传动图
2.2 清刷系统的设计
2.2.1 毛刷结构
毛刷的材料选择:选用尼龙丝作为毛刷材料,既满足了要求,又能提供良好的柔韧度。毛刷的形状及其尺寸:刷毛的结构设计为长条直线式毛刷。
根据垃圾箱的尺寸,设计该装置刷条的相应尺寸。其中,刷条的总长度分别为1 100 mm和530 mm,刷条厚度为20 mm,刷条与刷架之间通过螺栓连接,即整个装置呈1 100×530的矩形样式。由于垃圾箱最底部向内凹85 mm左右,为防止长度不够而给清洗作业带来困扰,因此将毛刷长度设计为120 mm为宜。
2.2.2 毛刷板的结构
毛刷板的材料:选择毛刷板的材料为硬塑料。
毛刷板的尺寸:由于垃圾箱呈矩形式,因此整个毛刷装置也需设计成矩形式,即由四根刷条组合成矩形框,方便清洗。四块毛刷板组成刷架,分别是两块尺寸为1 100 mm的水平刷板作为矩形长和两块尺寸为530 mm的刷板作矩形宽。
伸臂(刷杆)结构:由于毛刷装置自身重量较轻,考虑到承载车的承载质量问题,因此采用厚度为30 mm的方钢作伸臂。根据普遍车停靠路边的距离,测量出车与垃圾箱的距离为600~700 mm。为了预留一定的误差间距,所选伸臂长度为900 mm。伸臂为了能更好与毛刷架贴合,并满足因刷毛产生的重力而不造成倾斜或裂缝,将伸臂放置于连接板之间。在不工作时可以通过滑轨将其沿车头水平方向滑动至原始位置。
对垃圾箱箱面受到的摩擦力进行分析,即:
f=μmg=0.3×42×10 N=126 N
(21)
F—清洗过程中箱面受到的摩擦力;μ—摩擦因数选0.3;m—整个毛刷架及运动部件总质量为42 kg。要驱动齿轮,使毛刷架能上下运动所需要的驱动力为:
F驱·l=(mg+f)·L=2.4×103N
(22)
l—驱动手柄力臂为0.2 m;L—伸臂长。
2.3 喷水系统部分
喷水系统主要由水泵、水管、水枪组成。水通过水泵吸入经压缩后流经水管,最后经水枪喷射出。水枪通过控制出水嘴的流量来控制水的分散大小,从而实现水喷射过程。由于对垃圾箱喷水不需要太大压力,选择在2~5 MPa即可,因此选择微型水泵(12 V高压水泵)即可满足喷水。
3 结语
人力驱动城市垃圾箱清洗装置将高压水泵、开关阀门、细口喷头配合使用,采用的是人机配合控制的方式。机械传动通过人工控制,实现人机一体化的功能,整个清洗过程中用的是人机结合。将现有的环卫车进行改装、优化,合理利用资源,充分考虑了节约水资源的重要性,确保了资源的有效利用。与人工手持水枪清洗方式相比,该装置大大节省了水资源,清洗速度快,效率高,而且清洁净化程度高。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
大型铸锻件(2022年1期)2022-02-12
能源工程(2021年2期)2021-07-21
绿色科技(2020年11期)2020-08-01
水运工程(2020年2期)2020-02-26
中国设备工程(2019年12期)2019-08-05
物流技术与应用(2019年6期)2019-07-16
人民珠江(2019年6期)2019-06-28
兵器装备工程学报(2018年7期)2018-07-31
汽车零部件(2017年6期)2017-07-25