高速洁净玻璃基板搬运机器人发展现状与展望
2020-06-30 08:48刘正勇王广炎樊继壮陈友东
科学技术与工程 2020年16期
刘正勇,郭 垒,王广炎,樊继壮,陈友东
(1.合肥欣奕华智能机器有限公司,合肥 230013;2.哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨 150001;3.北京航空航天大学机械工程及自动化学院,北京 100191)
信息社会,显示面板无处不在。随着IT产业与平板显示(flat panel display,FPD)产业的飞速发展,市场对显示面板的需求越来越大,FPD产业已逐渐成为中国的战略新兴产业。
根据市场调研机构IHS Markit提供的数据及预测:2018年全球显示面板出货总面积为2.20×108m2,2026年预计将达到2.80×108m2[1]。目前生产显示面板的国家主要集中在中国、韩国和日本,占据全球市场很大份额。中国光学光电子行业协会液晶分会的数据显示,2017年中国大陆地区液晶面板无论是营收还是出货面积均已位居全球第一[2]。2019年第一季度数据显示,中国大陆地区面板厂的出货面积,首次超过全球面板市场出货面积份额的一半,达到50.1%[3]。
玻璃基板是FPD产业的关键基础材料,玻璃基板的尺寸越大,可以切割的选择性越大,生产效率就越高,因此为了节约成本和满足日益增大的显示面板尺寸需求,玻璃基板正朝着更大尺寸、更薄、更高分辨率的方向发展[4-5]。玻璃基板各世代的发展阶段如图1所示,按尺寸可大致分为小型(1~5代)、中型(6~9代)和大型(10代及以后)三大发展阶段。目前主流量产的玻璃基板尺寸已经达到了10.5代/11代。

图1 玻璃基板各世代发展阶段Fig.1 Development stages of glass substrate of various generations
在显示面板的生产过程中,玻璃基板需要被搬运放置到多个强酸碱和高温制造环境工位中进行处理,以满足制造工艺要求,同时由于玻璃基板具备尺寸大、超薄易碎的特点,要求生产设备的玻璃基板操作面具备较高的平面度和较小的振幅,以保证玻璃基板在生产过程中的安全。因此为了满足FPD严苛的制造条件,提高生产效率、降低生产成本和减少基板破损率,玻璃基板搬运机器人应运而生,成为显示面板生产线的关键设备之一[6-8],它的工作性能直接影响着玻璃基板的生产效率和制造质量。因此,研究高速洁净玻璃基板搬运机器人的关键技术和部件对提高中国FPD产品市场竞争力有很重要的现实意义。
1 玻璃基板搬运机器人结构
玻璃基板搬运机器人的主要功能是联结FPD产线前后段制程,实现玻璃基板在不同工位间的高平稳性、高速度和高洁净度传输[9]。它应该具备承受负载高、传输速度与FPD产线前后段制程同步、抓取装置不损伤、不污染玻璃基板以及传输过程产生的冲击和振动较小的能力。因此,玻璃基板搬运机器人要求具有结构刚性好、运动速度和定位精度高、占地面积小、操作空间大等特点[10]。国外高性能玻璃基板搬运机器人的研发高地主要集中在日本、韩国等发达国家,其中以日本的研究最为突出。20世纪90年代,日本面板生产商的快速发展使泛半导体设备生产企业获得了高速发展的良机,日本三协(Sankyo)、安川电机(Yaskawa)、三菱电机(Mitsubishi Electric)、平田机工(Hirata)与大阪变压器(Daihen)等巨头迅速占领了市场,小型玻璃基板搬运机器人的供应量占据了全球玻璃基板搬运机器人市场的90%左右。2000年以后,韩国TFT-LCD行业设备发展迅速,培养了现代重工、罗普斯达等公司。为对应尺寸日益大型化的玻璃基板搬运的新需求,市场开始出现中型甚至大型玻璃基板搬运机器人。
目前,在FPD产业中玻璃基板搬运机器人常用构型包括垂直多关节型玻璃基板搬运机器人、平面多关节型玻璃基板搬运机器人和圆柱坐标型玻璃基板搬运机器人。机器人坐标形式分类如图2所示。
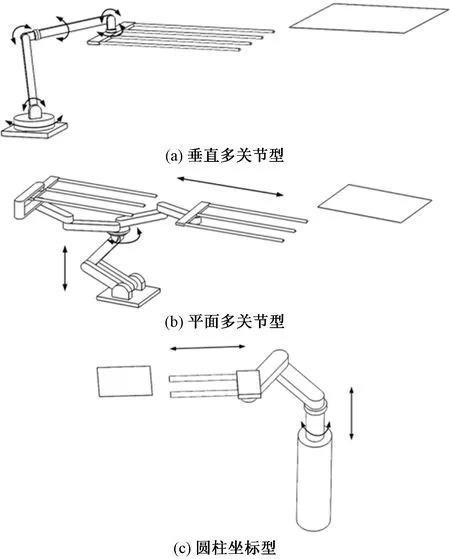
图2 机器人坐标形式分类Fig.2 Classification of robot coordinate forms
垂直多关节型玻璃基板搬运机器人通常具有6个自由度,每个自由度都由相对独立的驱动机构驱动,因此可以自由地实现三维位姿转换,特别适用于玻璃基板搬运过程中位姿发生变化的场合[10]。如在FPD产线前段Unpacking系统中,将箱子中堆叠的玻璃基板取出供给至生产线各个工序上的动作,就是由垂直多关节型玻璃基板搬运机器人完成的。
平面多关节型玻璃基板搬运机器人通常具有4个自由度。该类型机器人运动速度和定位精度较高,运动快捷、准确,同时由于玻璃基板在FPD产线的主要制造装备间以平面方式传输,故使得这种构型玻璃基板搬运机器人在小世代FPD产线中使用较多。例如,日本安川电机株式会社研制的多关节型液晶玻璃基板搬运机器人,在小世代机型上有较强竞争优势,拥有较高的用户保有量。
圆柱坐标型玻璃基板搬运机器人通常具有3个自由度:圆周旋转运动、垂直升降运动和水平伸缩运动。圆柱坐标型机器人又分为中心立柱构型、门式构型、立柱偏置构型,其构型分类如图3所示。

图3 圆柱坐标型机器人构型分类Fig.3 Classification of cylindrical coordinate robots
中心立柱构型圆柱坐标型机器人适用于小世代玻璃基板,并且此结构仅适用于垂直方向行程较短的应用工况。门式构型圆柱坐标型机器人承载能力强,但结构复杂、维护烦琐,回转半径大(占地空间大)、升降受限,不利于取放高位置的基板。立柱偏置构型圆柱坐标型机器人升降轴可设计成多段,可对应高度位置变化范围大的基板的取放;较容易实现模块化设计,弹性对应升降方向不同行程需求;运动控制相对简单;在适用尺寸、作业高度与基板搬运距离等方面具有优势。
2 玻璃基板搬运机器人发展现状
目前玻璃基板搬运机器人有以下发展趋势:①机械结构的轻量化、模块化和可重构化;②复杂环境下的安全、智能取放技术;③高洁净度保持技术;④机器人平稳运行与寿命智能预测技术;⑤系统集成及产线应用技术等。目前中外不少公司都有自己的搬运机器人系列化产品,基本可以满足大部分条件下的搬运需求。现主要针对中型和大型玻璃基板搬运机器人展开介绍。
如图4所示为Yaskawa公司的MOTOMAN- MFL2200D液晶玻璃基板搬运机器人[11]。该机器人是水平多关节型机器人,含有4个自由度,适用于第六代玻璃基板的搬运作业。本体质量为1 020 kg,负载可达50 kg/手臂。前后轴动作范围可达±1 675 mm,重复定位精度在±0.2 mm内。
Daihen公司的SPR-8573玻璃基板搬运机器人如图5所示。该类型机器人为3轴圆柱坐标型机器人,具有3个自由度,可在真空环境中传输第6代玻璃基板。配备原有冷却系统支持高温环境,能够负载120 kg[12]。

图4 MFL2200D玻璃基板搬运机器人Fig.4 MFL2200D glass substrate transfer robot

图5 SPR-8573玻璃基板搬运机器人Fig.5 SPR-8573 glass substrate transter robot
如图6所示为Sankyo公司的玻璃基板搬运机器人[13]。该类机器人为立柱偏置构型圆柱坐标机器人,采用模块化构造,可在大气中传输6~10代玻璃基板,通过轻量化设计与提升马达功率实现了机器人系统的高速运行。该类机器人可以在滑道内滑行,使运动空间大大提高。Z轴采用阶梯状结构,避免了结构重接导致的不稳定性问题。末端执行器采用蜂窝状锥形结构,降低了重量。同时,使用了高速高性能的SC5000控制器,大大提高了系统的安全性。
如图7所示为Robostar公司研制的AFDH1L629-545型玻璃基板搬运机器人[14],该类型机器人为门式构型圆柱坐标型机器人,可以搬运第10.5代玻璃基板,Z轴采用门状结构,最大行程5 450 mm,T轴可实现360°旋转,并同样可在滑道内滑行,工作操作范围广,两臂的重复定位精度均控制在±0.3 mm以内,作业环境洁净度可达Class 10。

图6 Sankyo公司的玻璃基板搬运机器人Fig.6 Glass substrate transfer robot of Sankyo

图7 AFDH1L629-545型玻璃基板搬运机器人Fig.7 AFDH1L629-545 glass substrate transfer robot of Robostar
2013年,中国合肥欣奕华智能机器有限公司进入该领域,通过引进国外高端创新人才、产学研合作等措施,先后产业化应用了中国首台5.5代、6代和8.5代基板搬运机器人(图8)。2015年,合肥欣奕华在世界机器人大会上展示了高世代产品,实现了对世界先进技术的“由追随到并跑”。
部分研究机构也从本体设计和控制系统等方面对玻璃基板搬运机器人进行了研究。
Lee等[15]为了减轻玻璃基板搬运机器人的机械臂重量,采用共固化方法对泡沫芯和钢模夹心结构进行联合设计,制作的机械臂和关节在玻璃基板搬运过程下的变形较小;Seo等[16]、Hwang等[17]设计了第8代玻璃基板搬运机器人,如图9所示,提出的设计方法主要用来设计和改进机器人,评估机器人动力部件的疲劳寿命,通过样机验证了数学模型和仿真方法的正确性;Fung等[18]采用实数编码遗传算法进行玻璃搬运机器人变量自适应函数的系统辨识,相比较其他变量自适应函数,提出的算法能得到较好的辨识效果;Fung等[19]采用哈密尔顿能量法推导永磁同步电机驱动液晶显示器搬运机器人的动力学方程,利用编码遗传算法辨识机器人系统各个参数,数值研究了由正时带柔性引起的振动对机器人角位移、速度、臂部加速度、水平位移和垂直位移的影响,表明动态模型的辨识结果与实验结果吻合较好。
大连理工大学丛明课题组[6,10]设计了圆柱形玻璃基板搬运机器人[20],如图10所示。该机器人具有3个自由度,包括Z向(垂直升降运动)、θ向(旋转运动)和R向(径向运动),机构方式属于中心立柱构型圆柱坐标型。其特点是Z向运动采用伺服电机通过同步齿型带轮驱动滚珠丝杠来实现,θ向运动由伺服电机经谐波减速器驱动,R向运动由伺服电机在谐波减速器和行星周转轮系的共同作用下,使执行模块保持直线运动。执行模块采用真空夹持技术,避免玻璃基板与执行模块机械本体的直接接触,减少对玻璃基板的污染;径向伸缩模块和旋转模块采用谐波减速器,减少传递误差和提高精度。

图8 合肥欣奕华的玻璃基板搬运机器人Fig.8 Glass substrate transfer robot of Hefei Sineva

图9 第8代玻璃基板搬运机器人Fig.9 8G glass substrate transfer robot
北京信息科技大学陈志华设计了基于翻转式的超薄玻璃在线码垛机器人,如图11所示。利用MATLAB-ADAMS软件对玻璃码垛机器人进行运动学联合仿真,通过PID控制技术减少瞬间振动。实验证明,玻璃码垛机器人分拣玻璃板过程中无较大振动现象,分拣效率高,玻璃破损率低[21]。

1为机座模块、控制模块;2为Z向升降模块、θ向旋转模块;3为R向伸缩模块;4为执行模块图10 玻璃基板搬运机器人Fig.10 Glass substrate transfer robot

图11 翻转式机器人样机Fig.11 Flip-type robot prototype
河南科技大学崔庆东[22]和王帅军[23]分别设计了一套玻璃堆垛工业机器人,如图12和图13所示;东南大学陈承新[24]对玻璃堆垛机器人系统做了总体研究。机器人采用真空吸附式末端执行器,通过建立系统运动学方程和轨迹规划,对机器人的性能做了分析和优化设计。

图12 崔庆东设计的玻璃堆垛工业机器人Fig.12 Glass stacking industrial robot designed by Cui Qingdong

图13 王帅军设计的玻璃堆垛工业机器人样机Fig.13 Glass stacking industrial robot prototype designed by Wang Shuaijun
虽然中国生产的搬运机器人已经实现了从无到有,但是核心技术上依然与日韩存在差距,部分技术指标和产线应用等方面亟待取得更大突破。中国自主研发的难点主要在两个方面:一是显示行业核心设备由日韩企业所垄断,核心技术壁垒高,研发投资大,研发风险高;二是FPD产线投资巨大,生产商经营压力大,FPD生产企业对承担导入国产化供应商风险的动力和意愿不强。为此,国家科技部为了推动中国大型玻璃基板搬运机器人的发展,于2018年设立国家重点研发计划项目“洁净环境大型玻璃基板智能搬运机器人系统开发及示范应用”。合肥欣奕华智能机器有限公司牵头申报该项目,获得立项并已经正式启动。这将促进中国玻璃基板搬运机器人向世界一流水平的发展。
3 关键技术分析
高速洁净玻璃基板搬运机器人作业环境恶劣,性能指标要求高。主要表现在以下方面:
(1)大重量、大尺寸、超薄易碎的搬运对象。10.5代玻璃基板尺寸≥ 2 940 mm × 3 370 mm,最小厚度达到0.4 mm以下。
(2)高变加速度与搬运基板位置变化带来的重心剧变条件下,机器人平稳、高速、高精度运行。手臂横向振动量≤ 7 mm,最高行走速度≥ 2.5 m/s,重复定位精度优于± 0.25 mm。
(3)高洁净度保持,适用环境洁净度等级优于Class10(0.3 μm)。
(4)高通用性和可扩展性。机器人工作范围大,可在整个玻璃基板加工过程中的不同恶劣环境中使用,还需要适应不同玻璃基板尺寸。
为了进一步提升高速洁净玻璃基板搬运机器人的性能指标,目前关于搬运机器人的研发主要集中在以下几个方面。
3.1 玻璃基板搬运机器人构型综合
构型综合是玻璃基板搬运机器人研究的基础,其内容包括机构拓扑结构综合和机构尺度综合两个方面。拓扑结构综合的目的是探索满足玻璃基板搬运机器人设计要求的理想构型,而机构尺度综合的目的是设计满足玻璃基板搬运机器人性能指标要求的理想机构部件尺寸[25]。构型综合对机器人研制至关重要,不仅仅是在结构上优化现有机构,更可以创造出性能更佳的新型机构[26]。
鉴于构型综合在机器人结构设计方面的重要作用,该问题持续受到国际机构学家的重点关注。初始阶段从业人员依靠观测、直觉和经验对机构进行粗略的综合,直到20世纪60年代拓扑图论方法的引入才使机构的构型综合有了数学理论基础,并基于此获得了一系列研究成果。近年来随着行业的发展,主要形成了基于螺旋理论、基于位移子群和基于方位特征的三种结构综合方法[27],基本可以满足不同适用范围的玻璃基板搬运机器人的机构设计要求。杨廷力等[27]将三种机构结构综合方法进行归纳和对比,为机构拓扑结构学进一步发展作出铺垫。孙志娟等[28]依据线性、非线性降维原则,研究了典型串联机器人机构的类型、尺寸与综合性能之间的映射规律。构型综合可以大大缩短玻璃基板搬运机器人的开发周期,节省大量的人力物力,促进新产品的研发工作。
3.2 玻璃基板搬运机器人模块化设计
模块化设计方法是通过以往产品设计和生产实践过程不断发展而来的,并于20世纪80年代应用于第一个模块化机器人RMMS[29]中,自此众多机构在理论方面以及生产实践中陆续开展了大量的工作。其基本思想是在产品功能性分析的基础上,把完整产品分解成若干个独立的、具有特定功能的模块,再以类似搭积木的方式将不同的模块组合成可以完成不同任务的系列化产品,以实现用户特定的需求[30-31]。典型性的研究成果除了RMMS[29](Carnegie MellonD大学研制)还有LWR-Ⅲ[32](德国宇航中心研制)等,此外瑞典ABB、日本Sankyo等公司在模块化设计的基础上研发了一系列玻璃基板搬运机器人产品,取得了巨大的经济效益。
模块的划分和设计是玻璃基板搬运机器人模块化的主要研究内容。对于工业机器人来说,其主体根据结构和功能主要可以划分为关节模块、连杆模块、伺服模块、控制模块以及执行器模块等[33],通过把各个模块有机地结合在一起,就可以集成整体的功能,从而实现机器人系统的模块化。玻璃基板搬运机器人的模块化设计可缩短研发周期,提高产品品质稳定性和系统可靠性,提高面向不同工艺流程的环境适应能力,同时方便机器人的维修和保养,有很好的应用前景。
3.3 玻璃基板搬运机器人振动抑制技术
搬运机器人在作业过程中,可能会因机械臂、末端执行器等构件振动过大导致玻璃基板的变形和损坏。这时需要采用合适的抑振手段,使系统的振动响应低于特定指标,以此来降低风险。工业机器人的振动抑制技术,从能量需求角度,主要分为主动抑振和被动抑振[34]。主动抑振的控制力是根据反馈信号按照某种事先设计的控制律实时产生,而被动抑振是通过采用储能、耗能材料或者机构优化的方式来降低振动,其控制力不是由反馈产生[35]。
被动抑振虽然实现简单且不会消耗外部能量,但是控制效果以及环境适应能力均较差,且往往需要在机器人主体上附加质量导致机器人工作能力下降;而主动抑振虽然需要依赖外部的能源,但是其环境适应能力较强可适应不同的场景需求。考虑到玻璃基板搬运机器人的轻量化设计需求,主动抑振技术显然更利于新型号的研制,而其中一个较重要的研究方向就是压电主动抑振技术[36],它主要是利用压电材料的逆压电效应,通过外界的能量输入对粘贴在基体上的压电元件产生可控的应力或应变,从而实现振动的主动控制。新型玻璃基板搬运机器人可以考虑采用压电主动抑振技术来达到不同工况的振动指标要求。
3.4 玻璃基板搬运机器人高速高精度控制技术
实现大型基板搬运机器人作业时的高速高精度控制,其难点在于大型机器人高平稳、低冲击的运动轨迹优化以及高性能控制算法,以下从这两方面展开探讨。
机器人的运动轨迹,是指其在工作过程中的运动参数,即位移、速度和加速度,而轨迹规划是指根据任务的要求,在满足机器人动力学、运动学约束条件下,计算得到机器人预期运动轨迹的方法[37]。中外关于机器人轨迹规划的研究众多,所针对的性能优化指标主要是时间最优[38-42]、能量最优[43-44]等。然而高世代玻璃基板尺寸较大,在搬运过程中容易磨损甚至破碎,在保证作业效率的情况下降低振动也格外重要。目前能直接将应用于玻璃基板搬运机器人的时间、振动、能量等因素综合考虑的轨迹规划方法较少,还有待进一步研究。
机器人运动控制一般是指将机器人指定的控制方案、规划轨迹转变为期望的关节运动,可在复杂条件下实现机器人各关节运动学、动力学参数的精确控制[45]。应用于高世代玻璃基板搬运的机器人系统在高速重载工作状况下,具有强非线性、不确定性和时变性的特点。由于PID算法等传统的控制方法精度较低,且不能迅速响应,因此中外学者提出了大量非线性控制方法[46-48]以及动力学模型误差补偿方法[49-50]等来弥补缺陷,此外智能算法的发展使自适应控制[51-54]等高级算法也可以应用到机器人的非线性控制中,玻璃基板搬运机器人可以考虑将传统算法以及智能算法结合来设计控制器,以此提高运行性能。
3.5 玻璃基板搬运机器人洁净保持与高速无痕抓取技术
玻璃基板在被搬运过程中对环境的洁净程度有着严苛的要求。然而机器人受限于零部件材料的挥发以及作业时关节往复运动产生的磨损颗粒污染,令洁净度的保持成为难题[7,55]。为此机器人需选用更加合适的材料和表面处理方法,如选用不锈钢、铝合金、陶瓷、聚氨酯等材料,或对铝合金零件表面阳极氧化处理、碳钢零件进行表面镀镍等,或研究部件内空腔形状与气流的关系,利用风扇过滤单元、风道设计配合特有的防尘密封负压设计等,确保磨损形成微粒不污染应用环境。此外由于末端执行器直接与易碎易污染的玻璃基板接触,其材料的选取以及设计的合理程度也关系到搬运的稳定性和可靠性。
为实现玻璃基板的洁净无痕抓取,保证玻璃基板在传输过程中不发生滑动偏移甚至掉落,末端执行器还需设置真空、电磁、仿生等固定吸盘以及传感器[56-60],需要考虑玻璃基板搬运机器人本体的运动特性与末端吸附机构的吸附强度和监测能力之间存在匹配性设计问题,即末端吸附结构对玻璃基板的法向和切向吸附强度以及对于基板吸附状态的监测能力直接限制了机器人本体的运行速度和加速度,从而最终影响产线玻璃基板搬运的节拍,因此,必须针对机器人本体运动特性设计搬运机器人高速洁净无痕取放末端执行机构。
4 结论
对玻璃基板搬运机器人的中外研究及应用现状进行了综述,分析了当前关键技术的发展趋势。目前玻璃基板搬运机器人的研究主要集中于本体结构设计与优化、控制系统研究与开发、高洁净结构设计与技术应用等方面。为使机器人在高速、高洁净、高精度的方向进一步发展,今后研究工作应充分考虑机器人关键性能需求,对本体结构和控制系统进行联合优化设计,以满足高世代玻璃基板搬运机器人的工业应用要求。高速洁净玻璃基板搬运机器人能够促进中国FPD产业的快速发展,具有广大的工程应用空间和经济价值。
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
电子产品可靠性与环境试验(2022年2期)2022-05-14
科学技术创新(2021年34期)2021-12-14
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
科学导报(2019年55期)2019-09-28
少年漫画(艺术创想)(2019年5期)2019-09-18
安徽化工(2018年6期)2019-01-11
电子制作(2018年11期)2018-08-04
北京航空航天大学学报(2017年10期)2017-04-20
科普童话·百科探秘(2015年5期)2015-05-26